Изобретение относится к аналогово измерительной технике и может быть использовано для получения оценок мореходных качеств судов различных классов. Известно устройство содержащее усреднитель 1 J, Недостатком указанного устройства является то, что оно не может быть использовано для оценки мореходных качеств судна непосредственно, на испытаниях судна, так как оно предназначено для усреднения одной случайно величины, в то время как оценка море ходных качеств судна может быть проведена только по полученной определенным образом совокупности усредненных случайных величин, таких как, например, дифферент, крен и потеря скорости хода при движении судна на волнении. . Наиболее близким к предлагаемому является устройство, содержащее блок сравнения, блоки масштабирования, сумматор и усилитель 2 Г. Недостатком известного устройства является низкая точность. Цель изобретения - повышение точности.: Поставленная цель достигается тем что в устройство введены усреднитель блок задания начальных условий, в каждый канал - датчики и задатчики соответственно дифферента, крена и скорости судна, блок индикации , блоки вычисления модуля, причем входы блока сравнения в каждом канале соединены с соответствующими выхсдами датчика и задатчика, выход блока сравнения в каждом канале через блок вычисления модуля подключен к входу блока масштабирования, выход сумматора соединен с первым входом усреднителя, второй вход которого подключен к выходу блока задания начальных условий} выход усреднителя соединен с входом блока индикации. На чертеже приведена структурная схема устройства для оценки мореходных качеств судна. Устройство содержит усреднитель 1 а также 2 и задатчик 3 диффер та, датчик 4 и задатчик 5 крена, дат ;чик 6 и задатчик 7 скорости хода суд на,м.цепь из последовательно соединен ных блоков 8 сравнения, блока 9 вычисления модуля, блока 10 масштабиро вания, цепь иа последовательно соединенных блока 11 сравнения, блока 12 вычисления модуля, блока 13 мдсшт бкрования, цепь из: последовательно соединенных блока 14 сравнения, блока 15 вычисления модуля, блока 16 масштабирования, сумматор 17, блок 1 задания начальных условий и блок 19 индикации. Входы блока 8 сравнения соединены с выходами датчика 2 и задатчика 3 дифферента соответственно, входы блока 11 сравнения соединены с выходами датчика 4 и задатЧика 5 крена соответственно, входы блока 14 сравнения соединены с выходами датчика б и задатчика 7 скорости хода соответственно, выходы блоков 10,13 и 16 масштабирования соединены с входами сумматора 17, выход которого соединен с входов усреднителя 1, управляющий вход которого соединен с выходом блока 18 задания начальных условий, а выход усреднителя 1-е входом блока 19 индикации. Устройство работает следующим образом. . . . Сигналы с выходов датчика 2 и задатчика 3 дифферента поступают на первый и второй входы блока .8 сравнения соответственно. Сигнадш с выходов датчика 4 и задатчика 5 крена посту.пают на первый и второй входы блока 8 сравнения соответственно. Сигналы с выходов датчика 6 и задатчика 7 скорости хода поступают на первый и второй входы блока 14 сравнения соответственно. Сигнал рассогласования дифферента Л V с выхода блока 8 сравнения поступает на вход блока 9 вычисления модуля, где производится вычисление модуля . Сигнал с вы-. .хода блока 9 вычисления модуля поступает на вход блока 10 масштабирования, где производится масштабирова;ч ние входного сигнала до величины yV-luVl, С выхода блока 12 вычисления модуля сигнал поступает на вход сумматора 17. Сигнал рассогласования крена д0 с выхода блока 11 сравнения поступает на вход блока 12 вычисления модуля, где производится вычисление модуля |д6. Сигнал с выхода блока 12 вычисления модуля поступает на йход блока 13 масштабирования, где производится масштабирование входного сигнала до величины „|Д0|. С вы .хода блока 13 масштабирования сигнал поступает на следующий вход сумматора 17. С выхода блока 14 сравнения сигнал рассогласования скорости хода гЗЧ/ поступает на вход блока 15 вычисления модуля, где производится вычисление модуля . Сигнал с выхода блока 15 вычисления модуля поступает на вход блока 16 масштабирования, где производится масштабирование входного сигнала до величины j(.|4V|. С выхода блока 16 масштабирования сигнал поступает на последующий вход сумматора 17. С выхода сумматора 17 сигнал, соответствующий величине ffyf vi-byg/dei+y Mvi,, поступает на вход усреднителя 1, где производится усреднение входного сигнала, когда с выхода блока 18 iзадания начальных условий на управ ляющий вход усреднителя поступает сигнал. Усреднитель 1 работает в режиме усилительного звена с коэффициенто передачи К и на выходе усредните ля 1 имеется сигнал, характеризующий текущее значение входного сигнала, и равный K()при установке блока 18 задания начальных уоповий в положение 2 (рабочее положениеJ сигнал с блока задания начальных условий поступае на управляющий вход усреднителя 1 t уёреднит ь 1 /производит усреднение входного сигнала ) и на его выходе имеется сигнал, характеризующ среднее значение входной величины и равный .;: .:--. . ,Щ fs (3V Mv| y0j4e f3vi f№4 где д дв иду -сигналы рассогласования соответствен но кан-алов дифферен та, крена и скорое.. .ТИ|1 . - . Ты f аГй Зл/ весовые коэффициен Т1Л соответственно /.каналов дифферента крена и скорости,. - коэффициент переда . чй усреднителя; Т -постоянная времени интегрирования усре ниТ:еля в режиме ин. . ,тегратора; Ь -тек5та1ёе время. Значение D являетсяоценкой | ореходйыХ;. качеств судна, ; Значения весовых коэффициентов TV Тб/ЗЧ/ определяются из технических требований к судну по допустимому отклонении) параметров его движения V, в и V от требуемых значений ( устанавливае№лх на задатчиках дифферента, крена, и С1{орости хода . ЕСЛИ: допустимые отклонения параметров движения, записанные в требованиях по мореходности судна, равны ц,, Eg и t ,то значения весоBtjx коэффициентов определяются fto 1 1 1 ; соотнетиениям |., в- Y С о Cg C-V 1Такнм образсми, развесовка сигналов, входящих в выражение Э , производится в соответствии с требованиями, предъявляемынн к мореходиым качествам судна. Значений 3 вычисляются устройством для оценки мореходных качеств судна в течение времени -fc , времени прохождения судном галса, с учетом того, чтобы за один галс судно совериило не менее 100 колебаний по дифференту. : . ; Так как значения 3 (оценка мореходных .качеств судна ) для различных судов, как и дяя одного и того же судна, выполненного в различных конструктивных вариантах, не одинаковы, то J можно использовать для оценки мореходных качеств судна. Чем меньше J , тем лучше мореходные качества судна, так как меньшие отклонения параметров движения судна (дифферента, крена, потери скорости хода ) от требуемых,; значений при движении судна на даолнении. . Сигнал с выхода усреднителя 1 поступает на вход блока 19 индикаций для регистрации. . Изобретение-по сравнению с известньоет устройствами отличаедазя более высокой точностью оценки мореходных качеств судна.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оценки мореходных качеств судна | 1983 |
|
SU1160457A2 |
| Анализатор мореходных качеств судна | 1983 |
|
SU1120372A1 |
| Анализатор мореходных качеств судна | 1985 |
|
SU1298781A2 |
| Система стабилизации полупогруженного плавучего средства | 1981 |
|
SU958220A1 |
| Имитатор морского волнения | 1981 |
|
SU1116440A2 |
| Система для контроля мореходных характеристик судна | 1983 |
|
SU1219446A1 |
| Устройство для определения ускорений произвольной точки судна | 1989 |
|
SU1816968A1 |
| Система уменьшения бортовой качки и рыскания по курсу судна | 1979 |
|
SU903813A1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
У :ПРОЙСТВО ДЛЯ ОЦЕНКИ МОРЕХОДНЫХ КАЧЕСТВ СУДНА, содержащее три идентичных канала дифферента, крена и скорости, каждый из которых состоит из блока сравнения и блока масштабирования, клхода блоков масштабировани я всех каналов подключены к входам сумматора,, о т л и ч а ющ е е с я тем, что, с целью повышения точности, э него введены усреднитель, блок индикации, блок задания начальных условий, датчики дифферента, крена и скорости судна, эадатчики дифферента, крена и скорости судна и в каждый канал - блок вычисления модуля, входы блока сравнения в каждом канале соединены с соответствувзпдами к осодами датчика и задатчика, выход блока сравнения в каждс канале через блок вычисления.модуля подключен к входу блока масштабирования, выход cy iaтора соединен с перкгм входом усреднителя, второй в)сод которого подключен к выходу блока задания начальных условий, выход .усреднителя соединен (О с входом блока индикаций.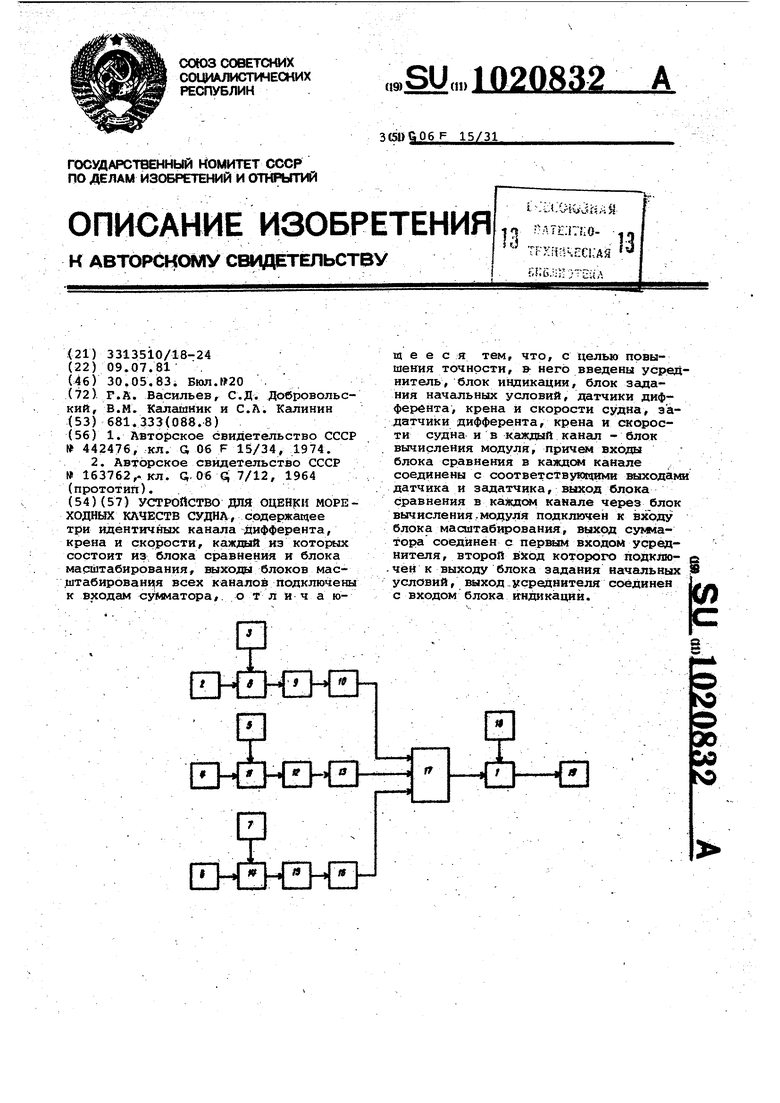
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Усреднитель | 1973 |
|
SU442476A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| 0 |
|
SU163762A1 | |
| Q, 06 Q 7/12, 1964 (прототип). | |||
