щих плечо и предплечье. Плечо шарнирно установлено на поворотной платформе 1 и сое тоит из звеньев 2 и 3, жестко связанных с силовыми цилиндрами 4 и 5 соответственно, звенья 2 и 3, а также силовые цилиндры 4, 5, 6 и 7, шарнирно связаны между собой, образуя при этом шарнирный четырехзвенник. Предплечье состоит из звеньев 8 и 9, жестко связанных с силовыми цилиндрами 10 и 11. Звенья 8 и 9, а также силовые цилиндры 10, 11, 12 и 13 шарнирно связаны между собой, образуя при этом также шарнирный четырехзвенник. Свободный конец звена 9 шарнирно связан
Изобретение относится к машиностроению, а именно к манипуляторам для обслуживания различных технологических операций.
Цель изобретения - расширение технологических возможностей исполнительного органа манипулятора путем повышения маневренности и грузоподъемности и расширения зоны обслуживания и грузоподъемности.
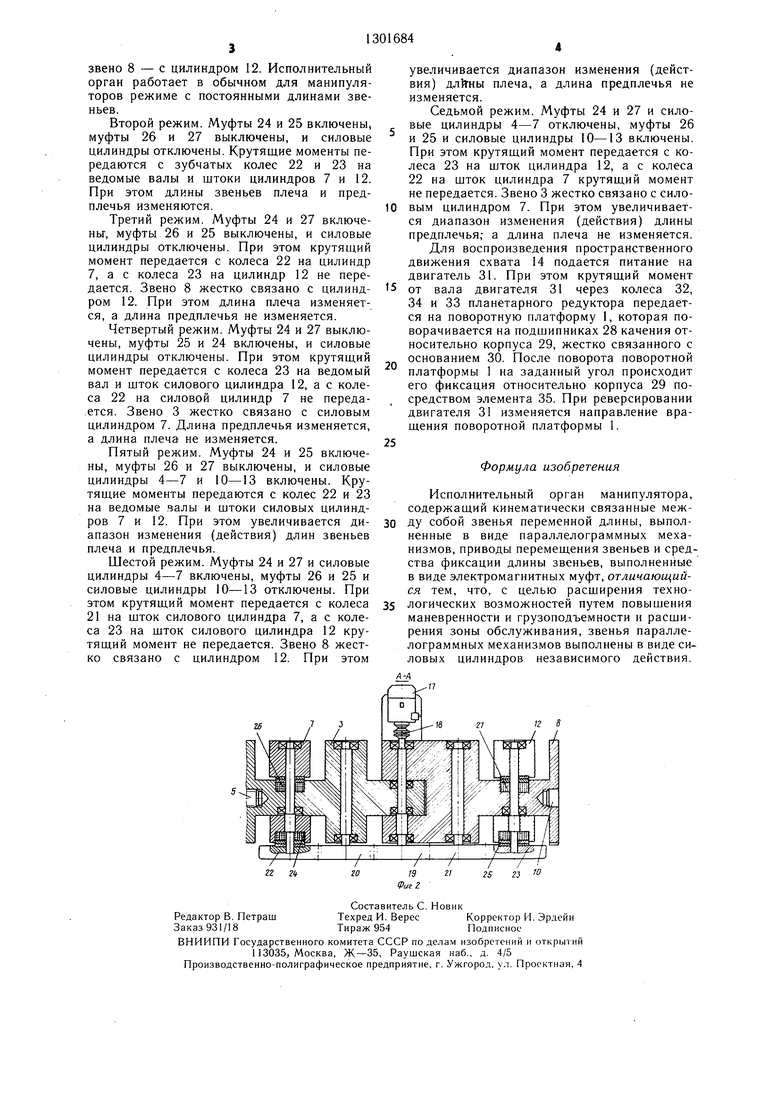
На фиг. 1 изображен исполнительный орган манипулятора, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Исполнительный орган манипулятора содержит поворотную платформу 1, плечо, шарнирно установленное на этой платформе и состоящее из звеньев 2 и 3, жестко связанных с силовыми цилиндрами 4 и 5 соответственно. Звенья 2 и 3, а также силовые цилиндры 4-7, в свою очередь, шарнирно связаны между собой и образуют при этом шарнирный четырехзвенник. Предплечье исполнительного органа манипулятора состоит из звеньев 8 и 9, жестко связанных с силовыми цилиндрами 10 и 11. Звенья 8 и 9, а также силовые цилиндры 10-13, в свою очередь, шарнирно связаны между собой, образуя при этом также шарнирный четырехзвенник. Свободный конец звена 9 шарнирно связан со схватом 14. Силовой цилиндр 15 предназначен для перемещения предплечья относительно плеча, а силовой цилиндр 16 - для перемещения плеча относительно платформы 1.
В месте шарнирного соединения плеча и предплечья установлен двигатель 17, который через муфту 18 связан с ведущим валом, на котором жестко закреплено зубчатое колесо 19, связанное посредством паразитных зубчатых колес 20 и 21 с зубчатыми колесами 22 и 23. Зубчатое колесо 22 связано с силовым цилиндром 7 через электромагнитную муфту 24, а колесо 23 с силовым цилиндром 12 через электромагнитную
со схватом 14. В месте шарнирного соединения плеча и предплечья установлен двигатель 17, который через систему электромагнитных муфт и др. элементов кинематически связан с силовыми цилиндрами 4, 5, 6, 7, 10, 11, 12 и 13. Параллело- граммные механизмы образованы соответственно силовыми цилиндрами 4, 5, 6, 7 и силовыми цилиндрами 10, 11, 12 и 13. Подбором вариантов включения силовых цилиндров и электромагнитных муфт достигается повышение маневренности и грузоподъемности исполнительного органа манипулятора и расширение зоны обслуживания. 2 ил.
муфту 25. Муфты 26 и 27 служат для фиксации относительных положений соответственно звена 3 с цилиндром 7 и звена 8 с цилиндром 12. Поворотная платформа 1
на подшипниках 28 качения установлена на корпусе 29, жестко связанном с основанием 30. В корпусе 29 расположен двигатель 31, на валу которого жестко закреплено цилиндрическое зубчатое колесо 32. В поворотной платформе 1, которая выполняет функцию водила планетарного механизма, встроены на подшипниках качения цилиндрические зубчатые колеса 33 (сателлиты), а внутри корпуса 29 жестко смонтировано зубчатое колесо 34 (солнечное или центральное
колесо) с внутренним зацеплением. Колеса 32-34 и платформа 1 образуют планетарный механизм. Элемент 35 фиксации соединяет между собой поворотну платформу 1 с корпусом 29.
Исполнительный орган манипулятора работает следующим образом.
Двигатель 17, передавая крутящий момент через муфту 18 ведущего вала и колесо 19, поворачивает зубчатые колеса 20 и 21. Последние передают вращение колесам 22 и 23, жестко связанным с соответствующими ведомыми валами. Дальнейшая работа исполнительного органа манипулятора зависит от режимов включения муфт 24-27 и от последовательности подключения силовых цилиндров 4-7 и 10-13. В зависимости от комбинаций подключения муфт и силовых
цилиндров исполнительный орган манипулятора работает в семи основных режимах при одновременной работе всех цилиндров. Первый режим. .Муфты 26 и 27 включены, муфты 24 и 25 выключены и силовые цилиндры отключены. В этом случае
крутящие моменты зубчатых колес 22 и 23 на ведомые валы и штоки силовых ци- линдр15в не передаются. Звено 3 оказывается жестко связанным с цилиндром 7, а
звено 8 - с цилиндром 12. Исполнительный орган работает в обычном для манипуляторов режиме с постоянными длинами звеньев.
Второй режим. Муфты 24 и 25 включены, муфты 26 и 27 выключены, и силовые цилиндры отключены. Крутящие моменты передаются с зубчатых колес 22 и 23 на ведомые валы и штоки цилиндров 7 и 12. При этом длины звеньев плеча и предплечья изменяются.
Третий режим. Муфты 24 и 27 включены, муфты 26 и 25 выключены, и силовые цилиндры отключены. При этом крутящий момент передается с колеса 22 на цилиндр 7, а с колеса 23 на цилиндр 12 не передается. Звено 8 жестко связано с цилиндром 12. При этом длина плеча изменяется, а длина предплечья не изменяется.
Четвертый режим. Муфты 24 и 27 выключены, муфты 25 и 24 включены, и силовые цилиндры отключены. При этом крутящий момент передается с колеса 23 на ведомый вал и шток силового цилиндра 12, а с колеса 22 на силовой цилиндр 7 не передается. Звено 3 жестко связано с силовым цилиндром 7. Длина предплечья изменяется, а длина плеча не изменяется.
Пятый режим. Муфты 24 и 25 включены, муфты 26 и 27 выключены, и силовые цилиндры 4-7 и 10-13 включены. Крутящие моменты передаются с колес 22 и 23 на ведомые .чалы и щтоки силовых цилиндувеличивается диапазон изменения (действия) дл ргны плеча, а длина предплечья не изменяется.
Седьмой режим. Муфты 24 и 27 и силовые цилиндры 4-7 отключены, муфты 26 и 25 и силовые цилиндры 10-13 включены. При этом крутящий момент передается с колеса 23 на шток цилиндра 12, а с колеса 22 на щток цилиндра 7 крутящий момент не передается. Звено 3 жестко связано с сило- 10 вым цилиндром 7. При этом увеличивается диапазон изменения (действия) длины предплечья; а длина плеча не изменяется. Для воспроизведения пространственного движения схвата 14 подается питание на двигатель 31. При этом крутящий момент от вала двигателя 31 через колеса 32, 34 и 33 планетарного редуктора передается на поворотную платформу 1, которая поворачивается на подщипниках 28 качения относительно корпуса 29, жестко связанного с основанием 30. После поворота поворотной платформы 1 на заданный угол происходит его фиксация относительно корпуса 29 посредством элемента 35. При реверсировании двигателя 31 изменяется направление вращения поворотной платформы 1.
15
20
25
Формула изобретения
Исполнительный орган манипулятора, содержащий кинематически связанные межров 7 и 12. При этом увеличивается ди- зо ДУ собой звенья переменной длины, выпол- апазон изменения (действия) длин звеньев плеча и предплечья.
Шестой режим. Муфты 24 и 27 и силовые цилиндры 4-7 включены, муфты 26 и 25 и силовые цилиндры 10-13 отключены. При этом крутящий момент передается с колеса 21 на щток силового цилиндра 7, а с колеса 23 на шток силового цилиндра 12 крутящий момент не передается. Звено 8 жестко связано с цилиндром 12. При этом
35
ненные в виде параллелограммных механизмов, приводы перемещения звеньев и средства фиксации длины звеньев, выполненные в виде электромагнитных муфт, отличающийся тем, что, с целью расширения технологических возможностей путем повышения маневренности и грузоподъемности и расширения зоны обслуживания, звенья параллелограммных механиз.мов выполнены в виде силовых цилиндров независимого действия.
гв
увеличивается диапазон изменения (действия) дл ргны плеча, а длина предплечья не изменяется.
Седьмой режим. Муфты 24 и 27 и силовые цилиндры 4-7 отключены, муфты 26 и 25 и силовые цилиндры 10-13 включены. При этом крутящий момент передается с колеса 23 на шток цилиндра 12, а с колеса 22 на щток цилиндра 7 крутящий момент не передается. Звено 3 жестко связано с сило- 0 вым цилиндром 7. При этом увеличивается диапазон изменения (действия) длины предплечья; а длина плеча не изменяется. Для воспроизведения пространственного движения схвата 14 подается питание на двигатель 31. При этом крутящий момент от вала двигателя 31 через колеса 32, 34 и 33 планетарного редуктора передается на поворотную платформу 1, которая поворачивается на подщипниках 28 качения относительно корпуса 29, жестко связанного с основанием 30. После поворота поворотной платформы 1 на заданный угол происходит его фиксация относительно корпуса 29 посредством элемента 35. При реверсировании двигателя 31 изменяется направление вращения поворотной платформы 1.
5
Формула изобретения
Исполнительный орган манипулятора, содержащий кинематически связанные меж ДУ собой звенья переменной длины, выпол-
зо ДУ собой звенья переменной длины, выпол-
35
ненные в виде параллелограммных механизмов, приводы перемещения звеньев и средства фиксации длины звеньев, выполненные в виде электромагнитных муфт, отличающийся тем, что, с целью расширения технологических возможностей путем повышения маневренности и грузоподъемности и расширения зоны обслуживания, звенья параллелограммных механиз.мов выполнены в виде силовых цилиндров независимого действия.
А
П
10
Составитель С. Новик
Техред И. ВересКорректор И. Эрдейи
Тираж 954Подиисное
ВНИИПИ Государствениого комитета СССР поделай изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, y. i. Проектная, 4
Редактор В. Петраш Заказ 931/18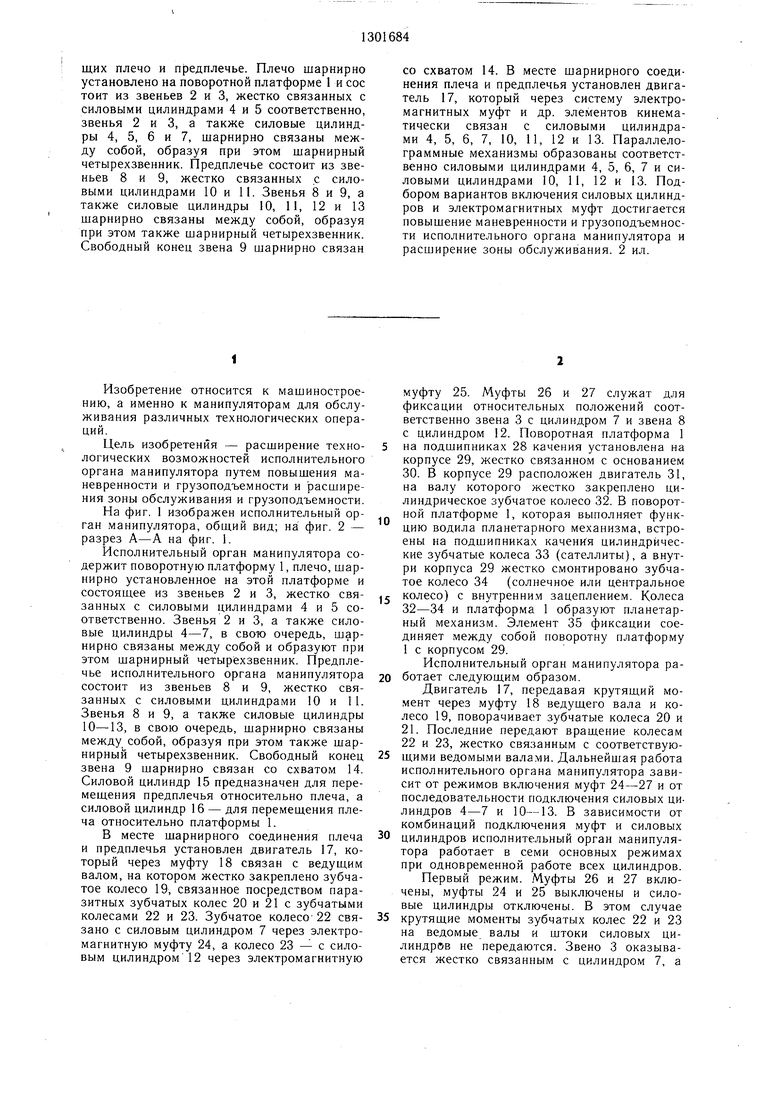
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1984 |
|
SU1161370A2 |
| Модуль исполнительного органа манипулятора | 1985 |
|
SU1301689A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Исполнительный орган манипулятора | 1978 |
|
SU814718A1 |
| Манипулятор | 1983 |
|
SU1159242A1 |
| Горная машина | 1986 |
|
SU1448041A1 |
| ПОГРУЗЧИК "ПРЯМАЯ ЛОПАТА" | 1993 |
|
RU2081052C1 |
| УКЛАДЧИК ДОРОЖНО-СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ | 1993 |
|
RU2076167C1 |
| НАВЕСНОЕ УСТРОЙСТВО ТРАКТОРА | 2011 |
|
RU2485742C1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
Изобретение относится к области машиностроения. Цель изобретения - расширение технологических возможностей исполнительного органа манипулятора путем повышения маневренности и расширения зоны обслуживания и грузоподъемности. Исполнительный орган манипулятора состоит из кинематически связанных между собой звеньев переменной длины, выполненных в виде параллелограммных механизмов и образую(Л оо Oi 00 4::
| Исполнительный орган манипулятора | 1980 |
|
SU889417A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Исполнительный орган манипулятора | 1978 |
|
SU814718A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
