I Изобретение относится к машиностроению и может быть использовано при создании манипуляторов, предназначенных для механизации ручных операций.
Цель изобретения - снижение энергоемкости и улучшение эксплуатационных характеристик.
На чертеже показан модуль исполнитель ного органа манипулятора, общий вид.
Модуль исполнительного органа манипуреннем цилиндре 18 и может приводиться в движение от конического колеса 21. Винт 25 выполнен пустотелым. Причем сквозь него свободно пропуш,ен телескопический вал 8. Винт 25 через гайку 26 связан с внешним цилиндром 19. Телескопический вал 8, расположенный по оси симметрии телескопической трубы, одним своим концом на подшипниках качения вмонтирован в центре корпуса 3, а другим, также
лятора состоит из механизма изменения уг- .|Q на подшипниках качения, закреплен во фланцевой части внешнего цилиндра 19 и имеет шлицевый выход, соответствуюший шлицево- му входу ведушего вала 5.
Модуль исполнительного органа манипулятора работает следующим образом.
При включении привода (не показан) крутяший момент подается на ведуший вал 5, который вращает коническое колесо 4. Последнее передает врапление на коническое колесо 6 и через него на коническое колесо 7. Коническое колесо 6 прила наклона смежных звеньев и механизма изменения длины одного из звеньев, установленных друг над другом. Механизм изменения угла наклона смежных звеньев состоит из платформы 1, на стойках которой в подшипниках качения установлен )5 вал 2, и корпуса 3, посаженного на том же валу 2 с возможностью поворота относительно него. В центре платформы на подшипниках качения установлена коническая шестерня (колесо) 4, жестко посаженная на приводном валу 5, имеющем на кон- 20 водит в движение вал 2, который вращает це шлицевую нарезку. Коническая шестерняконические колеса 9 и 10, а через них коле13 и 14 и далее колеса 11 и
4 входит в зацепление с коническим колесом 6, жестко установленным на валу 2, а коническое колесо 6 входит в зацепление с конической шестерней 7, жестко посаса 13 и 14 и далее колеса 11 и 12. Зубчатое коническое колесо 7 передает крутящий момент на телескопический вал 8. При отключенных электромагнитных муфтах
женной на конце телескопического вала 8. 25 15, 16, 23 и 24 и включенных электро- Кроме того, на валу 2 по обе сторонымагнитных муфтах 17, что соответствует
режиму.
от конического колеса 6 симметрично относительно оси устройства жестко установлены конические колеса 9 и 10, а также конические колеса 11 и 12, посаженные с помощью плавающих опор.
Устройство содержит также конические колеса 13 и 14, которые совместно с коническими колесами 9, 11 и 10, 12 образуют пару конических планетарных механизмов. В боковых стойках платформы 1
первому основному (холостому) система находится в состоянии покоя.
Во втором режиме электромагнитные муфты 17, 16, 23 и 24 отключены, а элект- 30 ромагнитная муфта 15 включена. В это.м случае коническое зубчатое колесо 1 1 остановлено, так как оно жестко связывается со стойкой платформы 1. Зубчатое коническое колесо 13 начинает перекатываться по коническому колесу 1 1, увлекая за
НИИ относительно платформы 1. Таким образом осуществляется качательное движение. Третий режим соответствует отключенным электромагнитным муфтам 17, 15, 23 и 24 и включенной муфте 16. В этом случае
установлены электромагнитные муфты 15 35 собой корпус 3, т. е. поворачивая послед- и 16 (элементы фиксации), связывающие зубчатые колеса 11 и 12. Кроме того, по периферии платформы 1 в дополнительных стойках расположены электромагнитные муфты 17 (элементы фиксации), служащие для
стопорения корпуса 3 относительно платфор- 40 про из водйтся кач ание в проти во положУучо
1.сторону.
На платформе 3 смонтирован возврат-Четвертый режим; муфты 15, 16 и 23 отно-поступательный блок, который выполненключены, муфты 17 и 24 включены. В
в виде телескопической трубы, состоящей этом случае зубчатое колесо 21 через муф- из внутреннего 18 и внешнего 19 элемен- ту 24 жестко связывается с валом 8 и на- тов - цилиндров. Причем во внутреннемчинает вращать винт 25. Вращение от коцилиндре 18 на телескопическом валу 8 свободно расположены конические колеса 20 и 21, входящие в зацепление с зубчатым коническим колесом 22, которое на опорах
нического колеса 21 передается также через коническое колесо 22 на коническое колесо 20, свободно поворачивающееся в обратную сторону относительно вала 8. При
качения установлено с внутренней стороны JQ вращении винта 25 гайка 26 начинает певнутреннего цилиндра 18. В конических колесах 20 и 21 смонтированы электромагнитные муфты 23 и 24 (элементы фиксации), связывающие последние с телескопическим валом 8. Коническое колесо 21 имеет внутреннюю шлицевую нарузку, с помощью которой через него можно передать крутящий момент на винт 25, который установлен в опорах качения, размещенных во внут55
ремещаться, увлекая за собой внешний цилиндр 19 и смещая его относительно внутреннего цилиндра 18. Так как конец телескопического вала 8 укреплен на фланце внещнего цилиндра 19, то верхняя его часть перемещается синхронно внешнему цилиндру 19 вдоль внутренней полости винта. Пятый режим: муфты 15, 16 и 24 отключены, муфты 17 и 23 включены. Этот
реннем цилиндре 18 и может приводиться в движение от конического колеса 21. Винт 25 выполнен пустотелым. Причем сквозь него свободно пропуш,ен телескопический вал 8. Винт 25 через гайку 26 связан с внешним цилиндром 19. Телескопический вал 8, расположенный по оси симметрии телескопической трубы, одним своим концом на подшипниках качения вмонтирован в центре корпуса 3, а другим, также
водит в движение вал 2, который вращает конические колеса 9 и 10, а через них коле13 и 14 и далее колеса 11 и
са 13 и 14 и далее колеса 11 и 12. Зубчатое коническое колесо 7 передает крутящий момент на телескопический вал 8. При отключенных электромагнитных муфтах
15, 16, 23 и 24 и включенных электро- магнитных муфтах 17, что соответствует
режиму.
первому основному (холостому) система находится в состоянии покоя.
Во втором режиме электромагнитные муфты 17, 16, 23 и 24 отключены, а элект- ромагнитная муфта 15 включена. В это.м случае коническое зубчатое колесо 1 1 остановлено, так как оно жестко связывается со стойкой платформы 1. Зубчатое коническое колесо 13 начинает перекатываться по коническому колесу 1 1, увлекая за
собой корпус 3, т. е. поворачивая послед-
НИИ относительно платформы 1. Таким образом осуществляется качательное движение. Третий режим соответствует отключенным электромагнитным муфтам 17, 15, 23 и 24 и включенной муфте 16. В этом случае
собой корпус 3, т. е. поворачивая послед-
про из водйтся кач ание в проти во положУучо
этом случае зубчатое колесо 21 через муф- ту 24 жестко связывается с валом 8 и на- чинает вращать винт 25. Вращение от конического колеса 21 передается также через коническое колесо 22 на коническое колесо 20, свободно поворачивающееся в обратную сторону относительно вала 8. При
вращении винта 25 гайка 26 начинает певращении винта 25 гайка 26 начинает пе
ремещаться, увлекая за собой внешний цилиндр 19 и смещая его относительно внутреннего цилиндра 18. Так как конец телескопического вала 8 укреплен на фланце внещнего цилиндра 19, то верхняя его часть перемещается синхронно внешнему цилиндру 19 вдоль внутренней полости винта. Пятый режим: муфты 15, 16 и 24 отключены, муфты 17 и 23 включены. Этот
режим соответствует противоположному движению телескопа. В этом случае зубчатое колесо 20 через муфту 23 жестко сцепляется с валом 8. Вращение от конического колеса 20 epeз коническое колесо 22 передается на коническое колесо 21, которое проворачивается в обратную сторону относительно вала 8 и увлекает за собой винт 25, перемещающий через гайку 26 внешний цилиндр 19 телескопа в противоположную сторону.
Формула изобретения
Модуль исполнительного органа манипулятора, содержащий кинематически свя- занные между собой механизм изменения угла наклона смежных звеньев и механизм изменения длины одного из звеньев, выполненного в виде телескопической трубы.
причем механизм изменения длины выполнен в виде винтовой пары, гайка которой жестко связана с одним из элементов телескопической трубы, а винт кинематически связан с приводным валом, отличающийся тем, что, с целью снижения энергоемкости и улучшения эксплуатационных характеристик, механизм изменения длины звена снабжен конической планетарной передачей и телескопическим валом, внутреннее звено которого посредством дополнительно введенных элементов фиксации связано с двумя сателлитами указанной конической планетарной передачи, а промежуточное коническое колесо этой передачи смонтировано внут-. ри второго звена телескопической трубы, при этом винт указанной винтовой передачи выполнен полым и связан с одним из сателлитов шлицевым соединением, а телескопический вал установлен внутри винта со- осно с ним.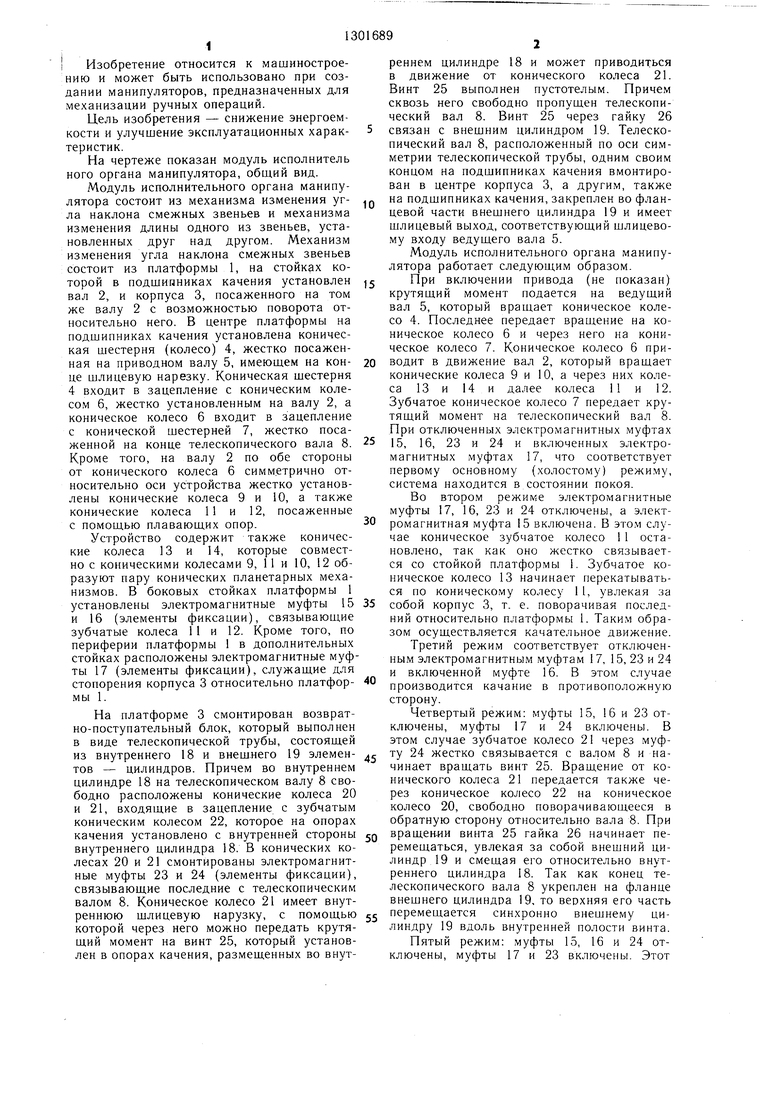
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1984 |
|
SU1161370A2 |
| Манипулятор | 1975 |
|
SU528194A2 |
| Исполнительный орган манипулятора | 1985 |
|
SU1301684A1 |
| Манипулятор | 1987 |
|
SU1657369A1 |
| Механизированный привод самоцентрирующего кулачкового патрона | 1989 |
|
SU1636135A1 |
| Сборочная головка с автопоиском | 1984 |
|
SU1227401A1 |
| ОТРЕЗНАЯ ГОЛОВКА К СТАНКУ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 1998 |
|
RU2149737C1 |
| ПЛАВАТЕЛЬНОЕ ОБОРУДОВАНИЕ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2390458C1 |
| ЗУБОШЕВИНГОВАЛЬНЫЙ СТАНОК | 1969 |
|
SU254314A1 |
| Захват промышленного робота | 1987 |
|
SU1451004A1 |
Изобретение относится к области робототехники и предназначено для снижения энергоемкости и улучшения эксплуатационных характеристик манипуляторов, а также для снижения металлоемкости конструкций за счет обеспечения сквозной передачи крутящего момента на рабочие элементы без использования дополнительных индивидуальных приводов. Модуль состоит из механизма изменения угла наклона звеньев, имеющего платформу 1, и механизма изменения длины одного из звеньев, кинематически связанных между собой с помощью вала 2. Механизм изменения длины звена выполнен в виде телескопической трубы 3 и полой винтовой пары, внутри которой свободно проходит телескопический вал 8, связанный с подвижным элементом 19 телескопической трубы. Крутящий момент подается на приводной вал 5, распределяющий его к механизмам изменения длины звена и изменения угла наклона звеньев один относительно другого. Управление перемещением осуществляется с помощью элементов фиксации - электромагнитных муфт. 1 ил. « (Л оо о CD 00 со / ; / / U-f- I4i 11 з s 2 J4
| Исполнительный орган манипулятора | 1984 |
|
SU1161370A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Исполнительный орган манипулятора | 1980 |
|
SU975381A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
