Изобретение относится к устройствам автоматического управления электроприводами постоянного тока, в частности для управления моталками и разматывателями рулонного проката.
Цель изобретения - повышение точности регулирования путем учета текущего .гламетра намотки.
На чертеже представлена блок-схема устройства для регулирования натяжения.
Устройство содержит суммирующий усилитель 1, задатчик 2 интенсивности, промежуточный усилитель 3, контур регулирования ЭДС, состоящий из сумматора 4, регулятора 5 ЭДС, датчика 6 -ЭДС, сумматора 7 и контур регулирования тока, состоящий из сумматора 8, регулятора 9 тока, датчика 10 тока, связанного с объектом 11 регулирования.
Кроме того, устройство содержит задатчик 12 натяжения, пороговый элемент 13, регулятор 14 зоны нечувствительности порогового элемента 13 например, потенциометр, интегратор 15, датчик 16 напряжения, корректирующий узел 17 и сумматор 18.
Датчик 6 ЭДС, пороговый элемент 13, интегратор 15, сумматор 18, суммирующий усилитель 1, задатчик 2 интенсивности и промежуточный усилитель 3 соединены последовательно. Выход промежуточного усилителя 3 подключен к первому входу сумматора 4. Элементы контуров ЭДС, тока и объекта 11 регулирования соединены в соответствии с известными взаимными связями этих контуров. Первый вход сумматора 18 соединен с входами регулятора 14, датчика 16 напряжения и выходом задатчика скорости перемотки (не показан). Выход регулятора 14 соединен с вторым входом порогового элемента 13.
Выход датчика 16 напряжения соеди- не-н с входом управления корректирующего узла 17, вход которого подключен к выходу интегратора 15, а выход - к сумматору 8. Выход задатчика 12 натяжения соединен с сумматором В.
Устройство в режиме размотки работает следующим образом.
Сигнал задания скорости подается на входы датчика 16 напряжения, регулятора 14 зоны нечувствительности и через сумматор 18 на суммирующий усилитель 1. Величина задания определяется скоростью вращения разматывателя при максимальном диаметре рулона ленты и скоростью вращения валков сопряженного механизма. С выхода суммирующего усилителя сигнал задания поступает на вход задатчика 2 интенсивности, который развертывает сигнал согласно с темпом разгона основного механизма. С выхода задатчика 2 интенсивности сигнал задания поступает на вход промежуточного усилителя 3 и далее на сумматор 4, где он складывается алгебраически с сигналом обратной связи по ЭДС, поступающим от дат
5
0
5
чика 6 ЭДС. Результат сложения подается на вход регулятора 5 ЭДС, где он преобразуется в сигнал задания тока Ь зт и поступает на сумматор 8. На сумматоре 8 из этого сигнала вычитается сигнал задания тока натяжения UIHMT, поступающий от задатчика 12 натяжения, и сигнал обратной связи по току UOT, поступающий от датчика 10 тока. Результат вычитания подается на вход регулятора 9 тока и далее на объект 11 регулирования. В результате раз- матыватель начинает разгоняться с динамическим током, уменьшенным на величину тока натяжения, и натяжение сохраняется в течение всего разгона до заданной скорости. Причем величина динамического тока определяется только темпом разгона привода в зависи мости от массы рулона и ограничивается только максимальным рабочим током двигателя, величина которого устанавливается ограничением выхода регулятора 5 37J,C. При условии, что линейная скорость ;iLMiTbi постоянна, по мере уменьшения диаметра рулона скорость вращения разматывателя под действием натяжения возрастает. Соответственно возрастает и сигнал датчика 6 ЭДС, так как магнитный поток двигателя постоянен. При некоторой скорости этот сигнал превышает порог зоны нечувствительности, определяемый напряжением на выходе регулятора 14, и на вход интегратора 15 поступает сигнал об уменьшении радиуса рулона. Этот сигнал с выхода интегратора 15 поступает на сумматор 18, где он складывается с сигналом задания. Результирующий сигнал через суммирующий усилитель 1, задатчик 2 интенсивности и промежуточный усилитель 3 подается на сумматор 4, где из него вычитается сигнал обратной связи по ЭДС. Промежуточный усилитель 3 настроен так. что в установившемся режиме размотки напряжение на выходе регулятора 5 ЭДС равно нулю, т.е. ивых.рэ 0.
В результате на вход сумматора 8 поступают только сигнал задания тока натяжения задатчика 12 натяжения и сигнал уменьшения радиуса рулона, который поступает через корректирующий узел 17 с выхода интегратора 15. Так как сигнал уменьшения радиуса рулона пропорционален превышению напряжения датчика 6 ЭДС над сигналом задания скорости, то уравнение моментов имеет вид
0
0
5
50М„ат К, 4 - -jf- ) V TR,
где Ki (р- - п) V - момент коррекции натяжения, учитывающий изменение радиуса рулона, НМ. Преобразуем это уравнение к виду
55
„ , 1
1
R«Kc-R
).
Определяем К, из условия, что при и D - R Т- МнАт .
-VH и K-RHUH
K,V-M
HAT RWUHПолученное значение К нредстгизлием в предыдущее уравнение
M«r-M..R«4-f -lri;7R).
Так как корректирующий узел 17 производит регулировку коэффициента Ki в соответствии с заданной линейной скоростью, то в каждом случае V VM, поэтому уравнение для натяжения имеет вид
Мнат .. Т-, / )1 ч -р
-Р-- МнатК«ин(-ББ)
R.ЖК-макс К
Из этого уровня видно, что при R --RnuH ч R RAWKC
J МЛАТ
Определяем максимальную погрешность регулирования натяжения.
f Производную --jg- приравниваем к нулю;
определяем радиус рулона, соответствующий экстремуму натяжения, и получаем
р-
ТЛАКС1- 5
Определяем максимальное натяжение
J МнАт(1-5) 1
плкс- Г Имцн К, «яке
AtHAI - 4К.мцн
2 .
дТ,
МЛКС
Т
МАКС
.
R НАКС
Мнат,(1-6) f i I ,-,i
дТ«акс -J- Т + )--
X(l- 6)2-1
при ,3 лТмакс 0,095
гамаке
Таким образом, погрешность регулирования не превйшает 10% от заданного натяжения.
Если в процессе размотки происходит остановка, то сигнал уменьщения радиуса рулона сохраняется в интеграторе 15, и при повторном пуске на вход задатчика 2 интенсивности подается суммарный сигнал задаВНИИПИЗаказ 938/22Тираж 591Подписное
Произволетвеино-полиграфическое мре.чприятис. г. У/кгоро.. .;. 1 ||1(1ектная. 4
ния и сигнала радиуса рулона. Поэтому привод разматывателя разгоняется до той скорости, которая соответствует радиусу рулона, находящемуся на разматывателе.
Первичное определение сигна.ча радиуса рулона производится при размотке рулона на заправочной скорости.
При изменении линейной скорости размотки корректируюни й узел 17 производит коррекцию сигнала радиуса рулона, поступающего с выхода, интегратора 15, в соответствии с сигналом задания скорости, подающегося через датчик 16 напряжения на его вход управления. Корректирующий узел 17 является переменным управляемым сопротивлением, величина которого зависит от напряжения управления.
При остановке или переходе на ступень с меньщей скоростью торможение привода производится в темпе задатчика 2 интенсивности с сохранением натяжения до полной остановки, так как привод тормозится моментом, равным сумме момента динамического и момента натяжения. При этом цепь регулятора 14 зоны нечувствительности снижает величину порога элемента 13 в темпе торможения привода, чтобы сохранить сигнал радиуса неизменным.
При реверсе задания на входе задатчика 2 интенсивности привод работает в режиме намотки.
30
Формула изобретения
Устройство для регулирования натяжения, содержащее задатчик скорости перемотки, задатчик интенсивности, промежуточный усилитель, подключенный выходом к
входу контура регулирования ЭДС с датчиком ЭДС и внутренним подчиненным контуром регулирования тока, соединенным одним из входов с задатчиком натяжения, отличающееся тем, что, с целью повьипения точности регулирования путем учета текущего диаметра намотки, оно снабжено суммирующим усилителем, пороговым элементом, интегратором, сумматором и регулятором зоны нечувствительности .порогового элемента, подключенным выходом к управляющему входу порогового элемента, причем выход датчика ЭДС через последовательно соединенные пороговый элемент и интегратор подключен к одному из входов контура ре1 улирования тока и к входу сумматора, второй вход которого связан с выходом задатчика скорости перемотки и входом регулятора зоны нечувствительности порогового элемента, а выход через последовательно включенные суммирующий усилитель и задатчик интенсивности - с входом промежуточного усилителя.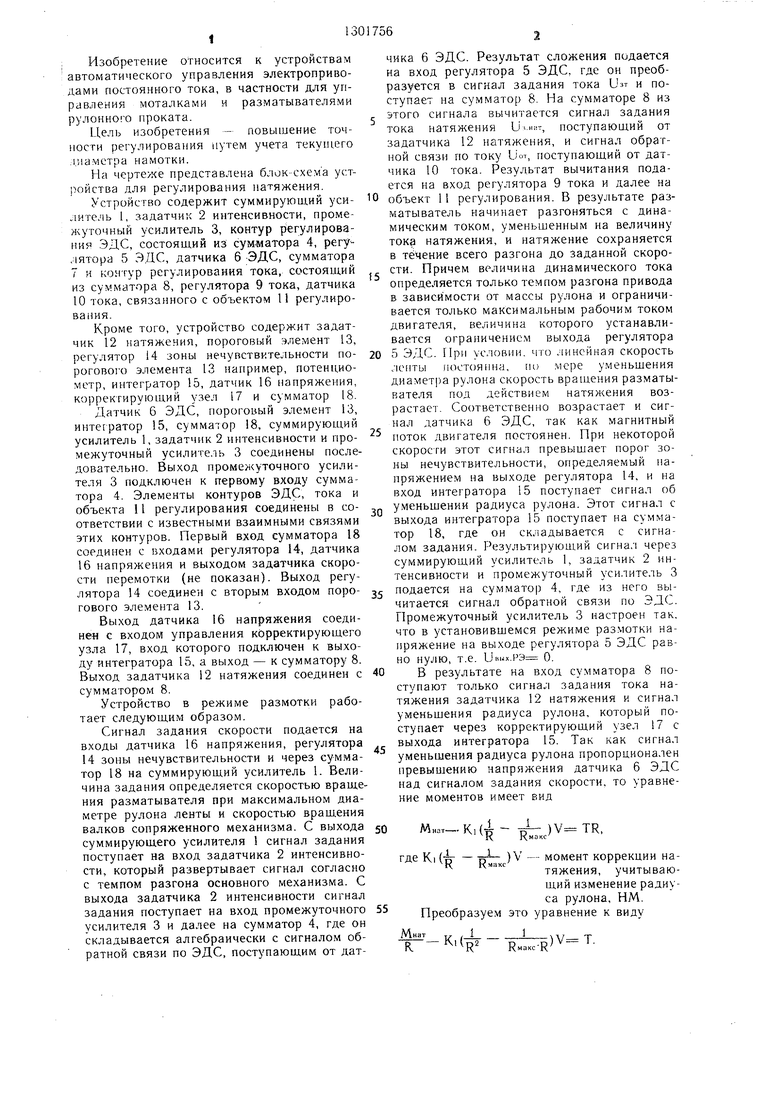
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Устройство для управления агрегатом перемотки полосы | 1987 |
|
SU1574311A1 |
| Линия продольной резки | 1988 |
|
SU1613215A1 |
| Устройство для регулирования натяжения полосового материал | 1976 |
|
SU568471A1 |
| Устройство для автоматического регулирования натяжения при перемотке ленточного материала | 1983 |
|
SU1131810A2 |
| Устройство для регулирования скорости прокатки | 1989 |
|
SU1786472A1 |
| Электропривод перематывающего устройства | 1988 |
|
SU1578076A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ЛЕНТОЧНОГО МАТЕРИАЛА | 2014 |
|
RU2559645C1 |
| Электропривод осевой намотки | 1989 |
|
SU1737688A1 |
| Устройство для автоматического регулирования натяжения при перемотке ленточного материала | 1975 |
|
SU727546A1 |
Изобретение относится к устройствам управления моталками и разматывателями рулонного проката. Цель изобретения - повышение точности регулирования. УстройстГ8 во для регулирования натяжения содержит контур регулирования ЭДС двигателя 11 на- матывателя с суммирующим усилителем 1, задатчиком 2 интенсивности, регулятором 5 и датчиком 6 ЭДС. Подчиненный контур тока содержит. регулятор с датчиком 10. Регулирующее воздействие вырабатывается с учетом задания натяжения от задатчика 12. Для обеспечения заданного натяжения при пуске с промежуточным значением радиуса намотки служат интегратор 15 и корректирующий элемент 17, выходной сигнал которого учитывает текущий радиус намотки. Перенастройка параметров релейного элемента 13 регулятором 14 и корректирующего элемента 17 датчиком 16 напряжения позволяет оптимизировать регулирование при смене задающего сигнала, поступающего на сумматор 18. 1 ил. i сл со ел Oi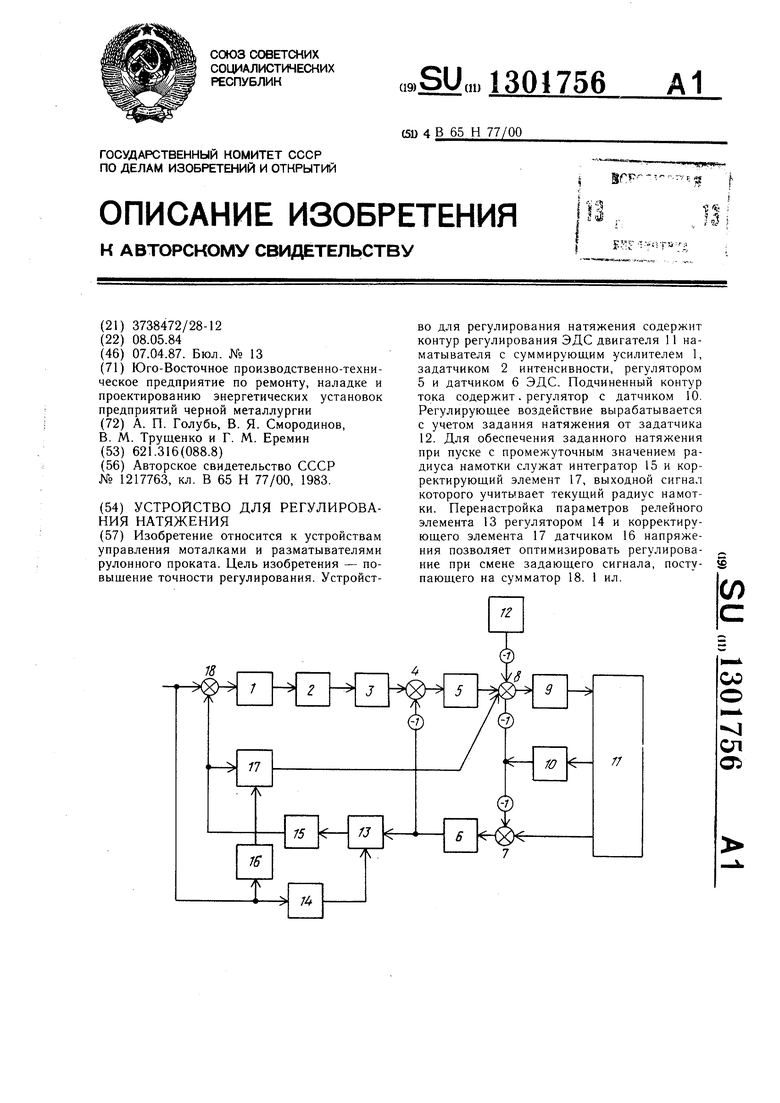
| Статический регулятор тока | 1983 |
|
SU1217763A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
