Изобретение относится к электротехнике и может найти применение в области управления электроприводом намотки - размотки.
Известно устройство для намотки, содержащее задатчик и регулятор скорости, датчик и регулятор тока якоря электродвигателя намотки, тиристорный преобразователь, измерительный генератор, два умножителя, задатчик начального радиуса задатчик начального радиуса, задатчик натяжения, интегратор и сумматор, причем якорь электродвигателя через датчик тока подключен к выходутиристорного преобразователя, вход которого соединен с выходом регулятора тока, по первому входу связанного с датчиком тока, а по второму - с выходом регулятора скорости выход измерительного генератора, установленного на оси электродвигателя, соединен с первым входом первого умножителя, выход которого подключен к первым входам интегратора и регулятора скорости, на второй вход интегратора подается сигнал фактической линейной скорости главного привода, выход интегратора связан с первым входом сумматора, по второму входу соединенного с за- датчиком начального радиуса, а по выходу - с вторым входом первого умножителя и с первым входом второго умножителя, второй вход которого связан с задатчиком натяжения, а выход - с вторым входом регулятора скорости, третий вход которого подключен к задатчику скорости.
Недостатком этого устройства является низкая точность регулирования натяжения, отсутствие узла запоминания радиуса в момент обрыва и низкая надежность ввиду наличия механического датчика.
Наиболее близким к изобретению по технической сущности является электропривод осевой намотки, содержащий задатчик и регулятор натяжения, датчик тока и регулятор тока электродвигателя намотки и тиристорный преобразователь, при этом задатчик натяжения подключен к первому вхосо
С
VI
со VI о
00 00
ду регулятора натяжения, якорь электродвигателя намотки через датчик тока под- ключен к выходу тиристорного преобразователя, вход которого соединен с выходом регулятора тока, по первому входу связанного с датчиком тока.
В этом электроприводе выход измерительного генератора, установленного на оси электродвигателя намотки, соединен с вторым входом регулятора натяжения, выход которого связан с вторым входом регулятора тока электродвигателя.
Регулирование натяжения производится косвенным способом по принципу поддержания в процессе намотки постоянства мощности на валу электродвигателя намотки:
Р М бО 1я-Се (0 F-V.
где Р и М - соответственно мощность и момент на валу электродвигателя:
о)-угловая скорость рулона, 1/с;
я - ток якоря электродвигателя, А;
Се - const при неизменном потоке воз- буждения электродвигателя, В-с;
F - натяжение полотна, Н.
Линейная скорость при перемотке должна поддерживаться:
V const Узад.
В прототипе для поддержания постоянным натяжения поддерживается постоянным произведение я ш. для чего используется измерительный генератор (ИГ), ток возбуждения которого меняется в зависимости от тока якоря я( Ф я).
Недостатком этого технического решения является невысокая точность измерения мощности ввиду нелинейной зависимости между током якоря и ЭДС из- мерительного генератора, низкая надежность ввиду наличия механического датчика, невысокое быстродействие, обусловленное наличием индуктивности (обмотки возбуждения ИГ) в цепи регулирования. Кроме того, при обрывах полотна устройство не запоминает ток (радиус) в момент обрыва, что не позволяет ввести коррекцию по радиусу в режимах разгона и торможения.
Целью изобретения является увеличе- ние точности поддержания натяжения за счет повышения надежности, расширение функциональных возможностей, повышение производительности за счет оптимизации времени разгона и торможения при /лучшении качества намотки.
Поставленная цель достигается тем, что з известный электропривод осевой намот- :и, содержащий задатчик и регулятор натя5
10
15
0
5
0
5
0 5
0 5
жения, датчик тока и регулятор тока электродвигателя намотки и тиристорный преобразователь, при этом задатчик натяжения подключен к первому входу регулятора натяжения, якорь электродвигателя намотки через датчик тока подключен к выходу тиристорного преобразователя, вход которого соединен с выходом регулятора тока, по первому входу связанного с датчиком тока, введены датчик напряжения, блок коррекции натяжения в функции радиуса рулона, два умножителя, запоминающее устройство, компаратор, блок выбора максимального входного сигнала, аппарат включения, резисторы начальной установки и коррекции и источник стабилизированного напряжения, при этом вход датчика напряжения соединен с выходом тиристорного преобразователя, выход датчика напряжения подключен к первому входу первого умножителя, выход которого соединен с вторым входом регулятора натяжения, выход датчика тока подключен к первому входу блока выбора максимального входного сигнала, к первому входу компаратора и к первому входу запоминающего устройства, второй вход которого через аппарат включения связан с регулируемым выводом резистора коррекции, подключенного к источнику стабилизированного напряжения параллельно с резистором начальной установки, регулируемый вывод которого соединен со вторым входом компаратора, выходом подключенного к третьему входу запоминающего устройства, выход которого соединен с вторым входом блока выбора максимального входного сигнала, третий вход которого связан с регулируемым выводом резистора начальной установки, а выход подключен к второму входу первого умножителя, первому входу второго умножителя и через блок коррекции натяжения в функции радиуса рулона связан с третьим входом регулятора натяжения, выход которого подключен к второму входу второго умножителя, а выход второго умножителя соединен с вторым входом регулятора тока.
По сравнению с прототипом осуществляется более точное поддержание натяжения за счет повышения надежности работы путем исключения механического датчика, расширяются функциональные возможности применения устройства: возможна работа в режимах и намотки и размотки, формирование рулона заданной структуры, расчет радиуса.
Устройство позволяет также повысить производительность за счет оптимизации времени разгона и торможения, так как в нем можно запоминать радиус намотки
(размотки) при обрывах полотна и остановах станка.
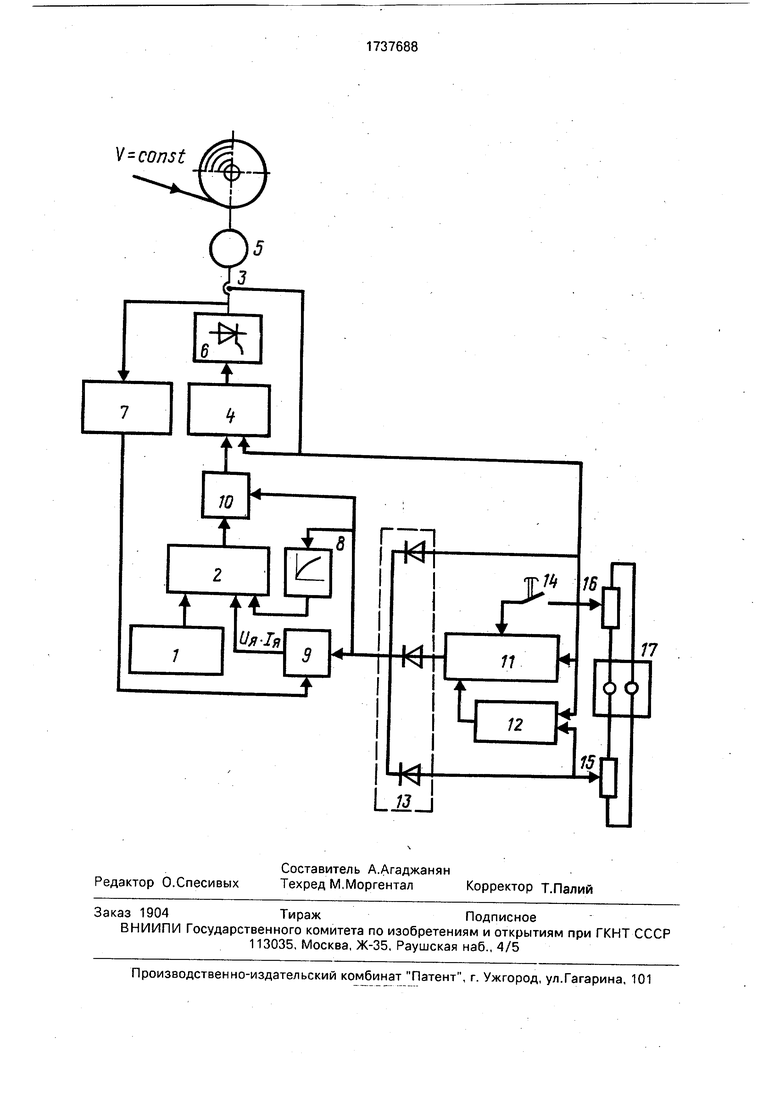
На чертеже представлена структурная схема электропривода.
Электропривод осевой намотки содержит задатчик 1 и регулятор 2 натяжения, датчик 3 и регулятор 4 тока электродвигателя 5 намотки и тиристорный преобразователь 6, при этом задатчик 1 натяжения подключен к первому входу регулятора 2 натяжения, якорь электродвигателя 5 намотки через датчик 3 тока подключен к выходу тиристорного преобразователя б, вход которого соединен с выходом регулятора 4 тока, по входу связанного с датчиком 3 тока. Электропривод осевой намотки содержит также датчик 7 напряжения, блок 8 коррекции натяжения в функции радиуса рулона, два умножителя 9 и 10, запоминающее устройство 11, компаратор 12, блок 13 выбора максимального входного сигнала, аппарат 14 включения, резистор 15 начальной установки и резистор 16 коррекции.источник 17 стабилизированного напряжения при этом вход датчика 7 напряжения соединен с выходом тиристорного преобразователя 6, выход датчика 7 напряжения подключен к первому входу первого умножителя 9,выход которого соединен с вторым входом регулятора 2 натяжения, выход датчика 3 тока подключен к первому входу блока 13 выбора максимального входного сигнала к первому входу компаратора 12 и к первому входу запоминающего устройства 11 второй вход которого через аппарат 14 включения связан с регулируемым выводом резистора 16 коррекции, подключенного к источнику 17 стабилизированного напряжения параллельно с резистором 15 начальной установки, регулируемый вывод которого соединен с вторым входом компаратора 12, выходом подключенного к третьему входу запоминающего устройства 11, выход которого соединен с вторым входом блока 13 выбора максимального входного сигнала, третий вход которого связан с регулируемым выводом резистора 15 начальной установки, а выход подключен к второму входу первого умножителя 9, первому входу второго умножителя 10 и через блок 8 коррекции натяжения в функции радиуса рулона связан с третьим входом регулятора 2 натяжения, выход которого подключен к второму входу второго умножителя 10, выход которого соединен со вторым входом регулятора 4 тока.
Электропривод осевой намотки функционирует следующим образом.
Регулирование натяжения производится косвенным способом по принципу поддержания постоянства мощности на валу электродвигателя:
P F V F.y-R Ея-1я Се- йНя,
,
где ия - напряжение на якоре электродвигателя, В;
К- коэффициент, который подбирается при наладке в зависимости от радиуса гильзы Rr.
Мерой натяжения служит произведение , а мерой измерения радиуса я. Для
того, чтобы сформировать рулон нужной плотности, до начала работы устройства в блок 8 коррекции натяжения в функции радиуса рулона вводится закон ослабления натяжения в функции радиуса рулона. В
запоминающем устройстве 11 хранится информация о начальном радиусе, Если требуется размотка стандартного рулона, то значение радиуса стандартного рулона вводится в запоминающее устройство 11 с резистора 15 начальной установки через компаратор 12, который разрешает вывод информации из запоминающего устройства 11 только при я я.нач. установки.
При размотке нестандартного рулона
радиус его вводится в запоминающее устройство 11 через аппарат 14 включения с резистора 16 коррекции.
В самом начале намотки при R Кнач.уст. сигнал с резистора 15 поступает
на блок 10 умножения и приводит в соответствие коэффициент усиления регулятора 2 натяжения, затем при увеличении радиуса намотки R RHa4.ycT. (1я (нач.уст.) срабатывает компаратор 12 и разрешает запоминающему устройству 11 запоминать информацию о токе, т.е. с этого момента запоминающее устройство 11 отслеживает значениетока и запоминает его, но на выход запоминающего устройства 11 сигнал не
проходит, так как ток якоря электродвигателя 5 намотки превышает значение тока, находящегося в запоминающем устройстве 11. и проходит по первому каналу.
Если произойдет обрыв или останов, то
ток якоря электродвигателя 5 намотки при повторном включении системы будет меньше значения тока, хранящегося в запоминающем устройстве 11, при этом блок 10 умножения по второму каналу получит информацию из запоминающего устройства 11 о токе в момент обрыва и приведет систему в соответствие с ним; ток по второму каналу будет протекать до тех пор, пока ток якоря электродвигателя 5 намотки не превысит значения тока, хранящегося в запоминающем устройстве 11. После этого ток будет снова протекать по первому каналу, а запоминающее устройство 11 будет отслеживать его.
Данное техническое решение позволяет подсчитывать радиус рулона косвенным способом, что не требует громоздких схем вычисления радиуса, а также позволяет запоминать радиус в момент обрыва или радиус исходного рулона, что, в свою очередь, дает возможность повысить производительность перемоточного станка.
Электропривод можно использовать как при осевой намотке, так и при осевой размотке, что расширяет его функциональные возможности по сравнению с прототипом. Простая логика работы позволяет облегчить диагностику системы регулирования натяжения электропривода осевой намотки - размотки.
При повышении точности поддержания натяжения уменьшится количество обрывов полотна, что приведет к повышению надежности и производительности работы,.
Оптимизация времени разгона и торможения в функции радиуса рулона также дает прибавку в увеличении производительности.
В целом это дает увеличение производительности, например суперкаландра, на 1 %.что позволяет выпустить дополнительно в сутки 2-3 т откаландрированной бумаги.
Формула изобретения
Электропривод осевой намотки, содержащий задатчик и регулятор натяжения, датчик тока и регулятор тока электродвигателя намотки и тиристорный преобразователь, при этом задатчик натяжения подключен к первому входу регулятора натяжения, якорь электродвигателя намотки через датчик тока подключен к выходутири- сторного преобразователя, вход которого соединен с выходом регулятора тока, по первому входу связанного с датчиком тока,
отличающийся тем, что, с целью увеличения точности поддержания натяжения за счет повышения надежности, расширения функциональных возможностей,
повышения производительности за счет оптимизации времени разгона и торможения при улучшении качества намотки, в него введены датчик напряжения, блок коррекции натяжения в функции радиуса рулона, два
умножителя, запоминающее устройство, компаратор, блок выбора максимального входного сигнала, аппарат включения, резисторы начальной установки и коррекции и источник стабилизированного напряжения,
при этом вход датчика напряжения соединен с выходом тиристорного преобразователя, выход датчика напряжения подключен к первому входу первого умножителя, выход которого соединен с вторым входом регулятора натяжения, выход датчика тока подключен к первому входу блока выбора максимального входного сигнала, к первому входу компаратора и к первому входу запоминающего устройства, второй вход которого через аппарат включения связан с регулируемым выводом резистора коррекции, подключенного к источнику стабилизированного напряжения параллельно с резистором начальной установки, регулируемый вывод которого соединен с вторым входом компаратора, выходом подключенного к третьему входу запоминающего устройства, выход которого соединен с вторым входом блока выбора максимального входного сигнала, третий вход которого связан с регулируемым выводом резистора начальной установки, а выход подключен к второму входу первого умножителя, первому входу второго умножителя и через блок коррекции
натяжения в функции радиуса рулона связан с третьим входом регулятора натяжения, выход которого подключен к второму входу второго умножителя, а выход второго умножителя соединен с вторым входом регулятора тока.
Vsconst
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования натяжения длинномерного материала при перемотке | 1986 |
|
SU1395579A1 |
| Устройство для регулирования натяжения при намотке длинномерного материала | 1988 |
|
SU1627488A1 |
| Двухдвигательный электропривод намоточной машины | 1981 |
|
SU964944A1 |
| Устройство для автоматического управления натяжением при намотке рулонного материала | 1989 |
|
SU1687550A1 |
| Электропривод моталки прецизионного агрегата | 1984 |
|
SU1288876A1 |
| Система управления параметрами движения полосового и пленочного материала | 1986 |
|
SU1471237A1 |
| Линия продольной резки | 1988 |
|
SU1613215A1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Устройство для регулирования натяжения полосы на моталке листопрокатного стана | 1982 |
|
SU1041188A1 |
| Устройство для автоматического регулирования натяжения при перемотке ленточного материала | 1983 |
|
SU1131810A2 |
Использование: в электроприводах намотки - размотки. Сущность: данное техническое решение позволяет подсчитывать радиус рулона косвенным способом, что не требует громоздких схем вычисления радиуса, а также позволяет запоминать радиус в момент обрыва или радиус исходного рулона, что дает возможность повысить производительность перемоточного станка. 1 ил.
| Кликунов С.Б | |||
| Системы автоматического управления тиристорн ым электроприводом суперкаландра | |||
| ЭЙ Целлюлозная бумага и картон, вып | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
