t
Изобретение относится к управляемым системам автоматического регулирования скорости электропривода, построенным на основе замыкания системы по разности фаз сравниваемых частотных сигналов, и может быть использовано в прецизионных устройства к которым предъявляются высокие точностные требования по управлению и стабилизации частоты и фазы вращения выходного вала.
20
25
30
Цель изобретения - повышение быстродействия и точности устройства для регулирования скорости электроприво- 15 да при изменяющихся внешних возмущающих воздействиях в широком диапазоне.
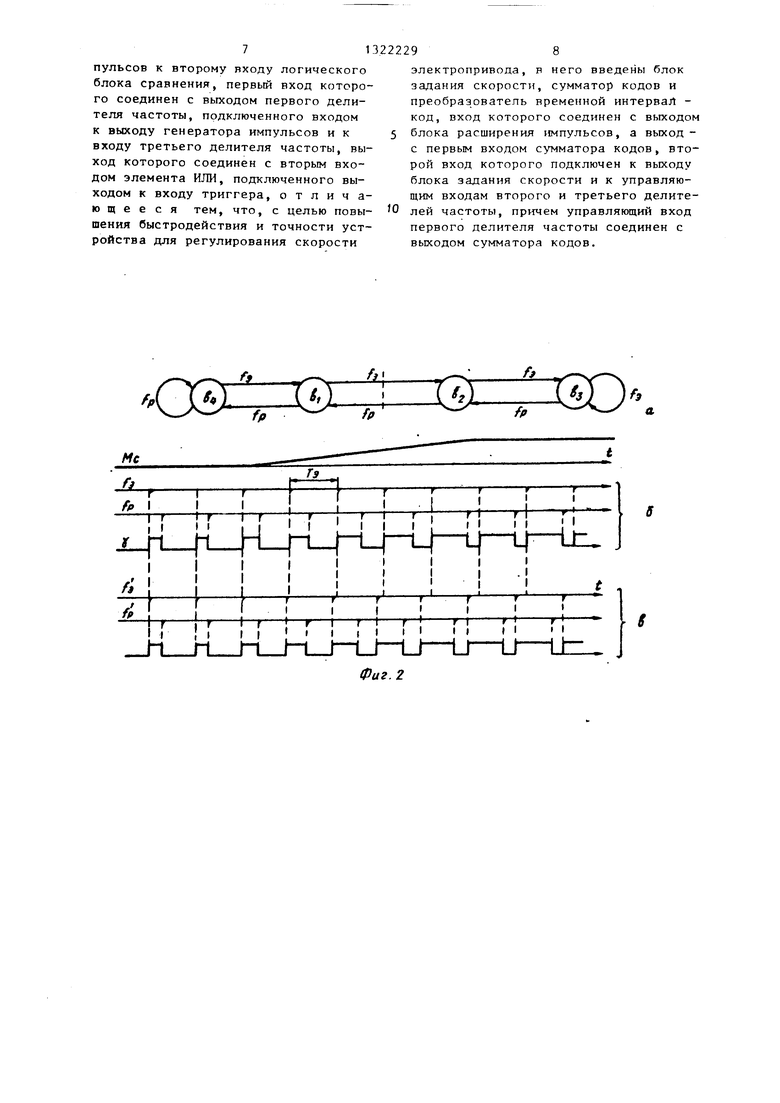
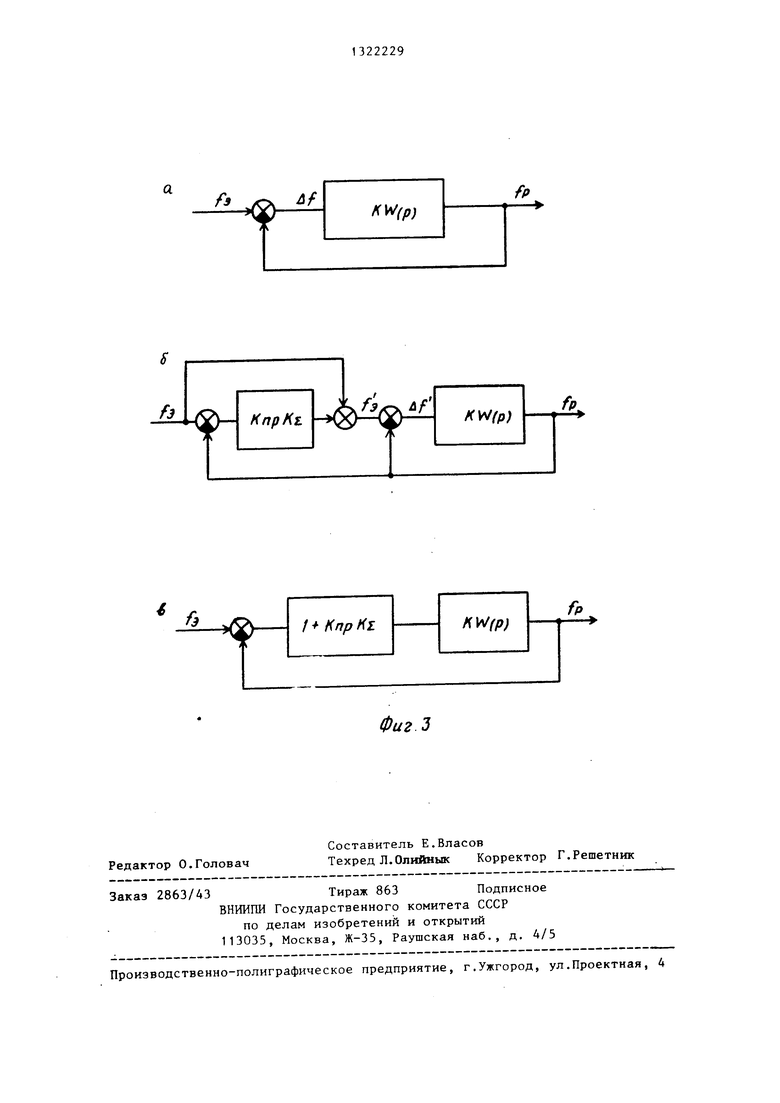
На фиг. 1 приведена блок-схема устройства для регулирования скорости электропривода} на фиг. 2 - граф-работы и временные диаграммы, поясняющие работу логического блока сравнения; на фиг. 3 - структурная схема устройства для регулирования скорости электропривода (а - схема известного регулятора скорости 6 - схема, отражающая логическую сущность работы устройства, 6- отражающая динамику системы).
Устройство для регулирования скорости электропривода содержит генератор 1 импульсов, делители частоты, логический блок 5 сравнения, силовой преобразователь 6, исполнительный двигатель 7, датчик 8 скорости, первьш формирователь 9 импульсов, элемент ИЛР1 10, элемент 11 задержки, триггер 12, блок 13 расширения импульсов, второй формирователь 14 импульсов, преобразователь 15 временной интервал - код, сумматор 16 кодов и блок 17 задания скорости.
Работа устройства для регулирования скорости основана на принципах импульсных
ропривода с дискретным управлением, основной контур которых замкнут по разности фаз сравниваемых частотных сигналов эталонной частоты f и частоты fp с датчика скорости.
Устройство работает следующим образом.
Блок 17 задания скорости представляет собой ручное или автоматическое
тоты коэффициент деления ливается
N:
устанав- выдаваезначением кода q , мым сумматором 16 кодов.
Управляемые делители 2-4 частоты могут быть вьшолнены по традиционной схеме, в которых реверсивный счетчик типа СТ2 охвачен обратной связью, с выхода О на вход С.
Эталонная частота f
If- fp частота кварцевого генератора
1
импульсов, поступает на первый вход логического блока 5 сравнения.
Сигнал с частотного датчика 8 скорости с числом импульсов Z на оборот вала двигателя 7 с помощью первого формирователя 9 импульсов и второго делителя 3 частоты с коэффициентом деления тоту
Np преобразуется в час40
Р
j пропорциональную скорости вращения Пд вала исполнительного двигателя 7, которая поступает на входы элемента 11 задержки и корректирующего устройства (фиг. 1, пунктирная рамка). Корректирующее устройство, содержащее третий делитель 4 частоты, элемент ИЛИ 10, триггер 12, блок 13 расширения импульсов и второй формирователь 14 импульсов, преобразует час- астатических систем элект- 45 тоту f в новую последовательность
импульсов fp,сдвинутую по фазе по отношению к fр , которая поступает на второй вход логического блока 5 сравнения. Частотный датчик 8 скорости 8 50 предназначен для выработки частотного сигнала, строго пропорционального скорости вращения вала двигателя 7. Формирователь 9 импульсов усиливает периодический сигнал с датчика
устройство, выдающее п-разрядный дво- 55 скорости, преобразует его в часто- ичный код в форме плектрических сиг- ту и обычно состоит из операционного
налов высокого и низкого уровней.
В простейшрм случае - это кнопочный набориик кодл, при автоматичес2
ком задании кода - программо-задаю- щее устройство или ЭВМ.
Блок 17 задания скорости выдает код q , соответствующий требуемому значению скорости на управляющие входы управляемых делителей 3 и А частоты и на вход сумматора 16 кодов. В соответствии с заданным кодом во втором 3 и третьим 4 делителях частоты устанавливаются требуемые значения коэффициентов деления Np и N соответственно. В первом делителе 2 час
тоты коэффициент деления ивается
N:
устанав- выдаваезначением кода q , мым сумматором 16 кодов.
Управляемые делители 2-4 частоты могут быть вьшолнены по традиционной схеме, в которых реверсивный счетчик типа СТ2 охвачен обратной связью, с выхода О на вход С.
5
0
Эталонная частота f
If- fp частота кварцевого генератора
1
импульсов, поступает на первый вход логического блока 5 сравнения.
Сигнал с частотного датчика 8 скорости с числом импульсов Z на оборот вала двигателя 7 с помощью первого формирователя 9 импульсов и второго делителя 3 частоты с коэффициентом деления тоту
Np преобразуется в часусилителя и компаратора.
Корректирующее устройство, как и в непрер) системах, предназначено
для обеспечения устойчивой работы усройства для регулирования скорости и придания ему желаемых динамических свойств.
Получение сигнала сводится к двум операциям: выявлению отклонения периода частоты fp от эталонного периода частоты f и расширению полученного отклонения (импульса) в необходимое число рал, определяемое из условия устойчивости системы.
Расширение импульса, осуществляемое блоком 13 расширения импульсов, может быть осуществлено известным образом. Получение стабильного вре- менного интервала Т производится путем вьмитания из периодов частоты fp периодов частоты f , выдаваемых третьим делителем 4 частоты, коэффициент деления которого Nj по отношению к коэффициенту деления N первого делителя 2 частоты определяется соотношением
N 2kp - 1
N,
2k,
где kp - коэффициент расширения блока 13 расширения импульсов.
Регулирование временного интервала Т во всем диапазоне рабочих ско- ростей устройства происходит синхронно с изменением эталонной частоты fj в соответствии с сигналами с блока 17 задания скорости за счет изменения коэффициента деления N делителя 4 частоты. Компаратор и блок разделения импульсов объединены в логический блок 5 сравнения, который производит сравнение по фазе импульсов частоты f и fp поступающих на его входы, и по результатам этого сравнения формируют широтно-импульсный сигнал (фиг. 26), который поступает на вход силового преобразователя 6.
На фиг. 2а представлен рациональ- ный алгоритм работы блока 5 пропорционального типа в виде направленного графа, обеспечивающий нормальную работу устройства при всех возможных комбинациях частот на его входах при - разгоне, торможении и в установившемся режиме синхронных скоростей, когда
fi г f fp - fj - f,.
Например, при пуске двигателя есть fj и нет fp. Блок 5 переходит в сое- тояние bj, идет разгон, редко появляются f р , т.е. fp ; f, происходит кратковременный переход из Ь - Ь,-«Ь. Двигатель разгоняется, приходят подO
5 0
5
о ,с Q
5 0
5
ряд двл импульса fp , при гэтом блок 5 переходит из Ь - Ь, . Устанонип- шийся режим, когда f j, fj имеют место переходы b - bj - b, и т.д., т.е. разгон, торможение. При фазовом рассогласовании большем периода f, блок 5 занимает два крайних состояния bj или Ь, в которых осуществляется блокировка сигнала от опрокидывания .
Силовой преобразователь 6 производит усиление широтно-импульсного сигнала, поступающего с выхода блока 5, и подает его на якорную обмотку двигателя 7. Силовой преобразователь 6 работает в ключевом режиме.
Из временных диаграмм, иллюстрирующих работу устройства (фиг. 2б), следует, что относительная длительность широтно-импульсного сигнала v возрастает с увеличением момента нагрузки MC на валу исполнительного двигателя. Причем изменение происходит только за счет изменения частоты и фазы сигнала fp или тоже самое за счет ошибок стабилизации скорости и фазы вращения вала исполнительного двигателя. Величина этих ошибок в основном определяется велргчиной коэффициента усиления D или добротностью системы. Аналогичная картина формирования 2f происходит и в случае изменения управляющего воздействия, т.е. изменение установки скорости определяемой f .
Дополнительный контур регулирования, состоящий из блока 17 задания скорости, сумматора 16 кодов и преобразователя 15 временной интервал - код позволяет формировать управляющий широтно-импульсный сигнал f как за счет изменения частоты и фазы сигнала fр, так и за счет изменения частоты и фазы эталонного сигнала f j одновременно. Такое управление регулятором увеличивает быстродействие привода и существенно уменьшает ошибки стабилизации скорости и фазы вращения двигателя.
Временные диaгpaм rы, иллюстрирующие формирование широтно-и тульсного сигнала у в устройстве, приведены на фиг. 2в для наглядности гтри коэффициенте суммирования ошибки К 2 1 .
физическая сущность и реализация дополнительного контура заключается в следующем.
Широтно-импульсный сигнал, поступающий на вход преоб1)атователя 1
временной интервал - код с блока расширения импульсов Т , йТ Тр - Тц - временной интервал формируемый на выходе триггера 12,
TK периоды частоты fp и часто- 5
ты
к
получаемой с выхода третьего делителя 4 частоты. В установившемся режиме работы устройства, когда частоты
f; f.
fp
временной
интервал Т„а ЛТдКр выбирается из условия получения симметричной характеристики регулятора равньм половине периода частоты
Так как в этом режиме ЛТ Т, - Тц.
т.е.
-YТр то
То Т,
В случае, когда f р f и ip zj, то имеет место отклонение по скорости, величина которого пропорциональт - р
Т., может быть записано
И
на временному интервалу (W
Тогда вьфажение для широтно-импуль сного сигнала в.виде Т J, Тз/2 К
Из полученного выражения следует, что щиротно-импульсный сигнал Т, поступающий на вход преобразователя 15 временной интервал - код из блока 13 расширения импульсов, содержит информацию об отклонении скорости и может изменять свою величину в линейной зоне регулятора в пределах О ,.
Преобразователь 15 временной интервал - код вьтолнен по традиционной схеме и в простейшем случае содержит генератор частоты заполнения f, элемент И, счетчик импульсов и регистр.
В этом преобразователе длительность широтно-импульсного сигнала Т,, преобразуется в п-разрядный двоичный код, численное значение которого, q
. ,
где К,р- коэффициент преЭ
образователя - выбирается таким, что в установившемся режиме при Т- Т значение кода q в точности равно коду q , вьщаваемому блоком 17 задания скорости. В частности при использовании для заполнения частоты генератора 1 импульсов f f гтр 2- Полученные в преобразователе 15
я„и q поступают 16 кодов, который разность дч q э
на входы суммас ними вычисq, а также
Q гатель, датчик скорости, первый формирователь импульсов подключен к входу второго делителя частоты,выход которого соединен с входом сброса третьего делителя частоты, с первым
алгебраическую сумму q 4, 51 где k 1,2,..., п - коэффициент сум- входом элемента ИЛИ и через элемент мирования ошибки.задержки - с входом сброса триггера,
Сформированный таким образом код подключенного выходом через последовательно соединенные блок расширения импульсов и второй формирователь имq поступает на информационные входы
первого делителя 2 частоты, изменяя
,
1322229
13
где
его коэффициент деления N а следовательно, и эталонную
п
f af
i , - -Э
Очевидно, в установившемся режиме работы устройства, когда ошибка по
скорости равна Чэ - Чп
нулю, имеют место
и N,
ч;
N,, f, f, - fp. Эталонная частота f, изменяет свою величину пропорционально выявленному отклонению скорости, причем измене
15
ние частоты fJ в направлении, частоты f о , т.е. если fp f
Р
происходит всегда обратном изменению ft то
f f5, и наоборот.
Сумматор кодов может быть выпрл
35
нен по традиционной схеме с использованием любых микросхем типа SM.
Введение дополнительных элементов и связей (фиг.36, в) увеличивает доб20 ротность системы устройства в (1 + + КррКу) раз, не повышая порядка ее астатизма.
В этом случае устойчивость системы обеспечивается соответствующим
25 выбором величины коэффициента расширения Кр устройства коррекции.
Повьш1ение точностных качеств электропривода устройства осуществляется 30 не только благодаря увеличению добротности системы в (1 Kj) раз, но главным образом за счет фазового сдвига эталонной частоты и в переходных режимах, которая участвует в формировании сигнала управления j тем эффективнее, чем вьш1е значение К«.
Формула изобретения
40 Устройство для регулирования скорости электропривода, содержащее генератор импульсов, первый, второй и третий делители частоты, элемент ИЛИ, элемент задержки, триггер, блок ширения импульсов, первьй и второй формирователи импульсов, логический блок сравнения, выход которого через последовательно соединенные силовой преобразователь, исполнительный гатель, датчик скорости, первый формирователь импульсов подключен к входу второго делителя частоты,выход которого соединен с входом сброса третьего делителя частоты, с первым
входом элемента ИЛИ и через элемент задержки - с входом сброса триггера,
71
пульсов к второму входу логического блока сравнения, первый вход которого соединен с выходом первого делителя частоты, подключенного входом к выходу генератора импульсов и к входу третьего делителя частоты, выход которого соединен с вторым входом элемента ИЛИ, подключенного выходом к входу триггера, отличающееся тем, что, с целью повышения быстродействия и точности устройства для регулирования скорости
/ ОЖ-ШЭ
fy- 222298
электропривода, в него введены блок задания скорости, сумматор кодов и преобразователь временной интервал - код, вход которого соединен с выходом 5 блока расширения импульсов, а выход - с первым входом сумматора кодов, второй вход которого подключен к выходу блока задания скорости и к управляющим входам второго и третьего делите- 0 лей частоты, причем управляющий вход первого делителя частоты соединен с выходом сумматора кодов.
fo
.I
ЗЮ
Me
Фиг. 2
а
Л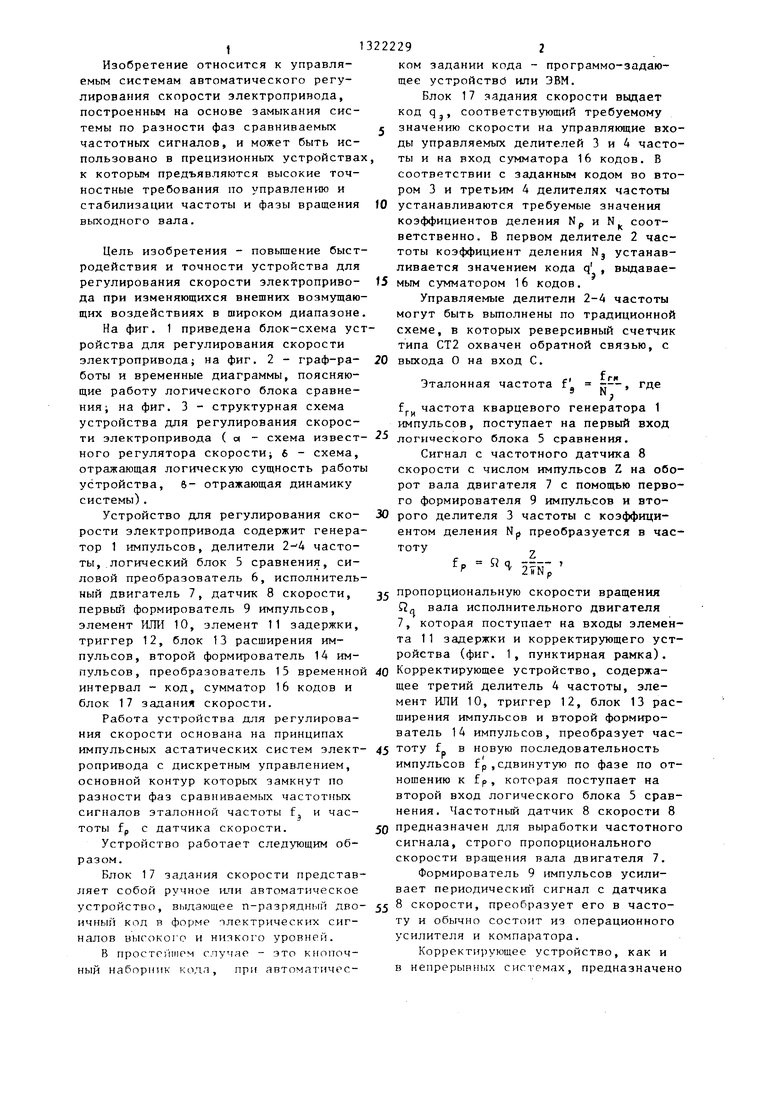


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости электропривода | 1988 |
|
SU1539725A1 |
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
| Электропривод | 1986 |
|
SU1390757A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Регулятор частоты для асинхронного тягового электропривода | 1982 |
|
SU1026275A1 |
| Следящий электропривод с компенсацией люфта | 1985 |
|
SU1273875A1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Цифровой следящий привод | 1978 |
|
SU734607A1 |
| Позиционный электропривод с инди-КАциЕй пЕРЕМЕщЕНия МЕХАНизМА | 1979 |
|
SU809051A1 |
| Электропривод с дискретным управлением | 1977 |
|
SU738083A1 |
Изобретение относится к автоматике и может использоваться в прецизионных устройствах для регулирования- скорости электропривода. Цель изобретения - повышение быстродействия и точности устройства для регулирования скорости электропривода при изменяющихся внешних возмущающих воздействиях. Цель достигается введением в устройство дополнительного контура регулирования, состоящего из преобразователя временной интервал - код 15, сумматора кодов 16, блока задания скорости 17, позволяющего увеличить добротность устройства. Дополнительный контур позволяет формировать управляющий широтно-им- пульсный сигнал как за счет изменения частоты и фазы сигнала fj, , так и за счет изменения частоты и фазы эталонного сигнала fj одновременно. Устройство содержит генератор импульсов 1, управляемые делители частоты 2, 3 и 4, логический блок сравнения 5, силовой преобразователь 6, исполнительный двигатель 7, датчик скорости 8, формирователи импульсов 9, 14, элемент ИЛИ 10, элемент задержки 11, триггер 12, блок расширения импульсов 13. 3 ил. i (Л СлЭ to to ю со fe./
Редактор 0.Головач
Составитель Е.Власов
Техред Л.Олийнык Корректор Г.Решетник
Заказ 2863/43Тираж 863 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
.«...«..к «... .«.. Д
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Фиг 3
| Трахтенберг P.M | |||
| Импульсные астатические системы электропривода с дискретным управлением | |||
| - М.: Энер- гоиздат, 1982, с | |||
| Счетная линейка для вычисления объемов земляных работ | 1919 |
|
SU160A1 |
| Электропривод | 1983 |
|
SU1107241A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Хоровиц П., Хилл У | |||
| Искусство схемотехники | |||
| Т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| М.: Мир, 1983, с | |||
| Электромагнитный счетчик электрических замыканий | 1921 |
|
SU372A1 |
| Регулятор скорости | 1975 |
|
SU559226A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
