Изобретение относится к подъемно- транспортному машиностроению, а именно к манипуляторам для перемещения грузов, и может быть использовано в различных отраслях промьшшенности.
Цель изобретения - расширение технологических возможностей за счет манипулирования длинномерными и тяжелыми изделиями.
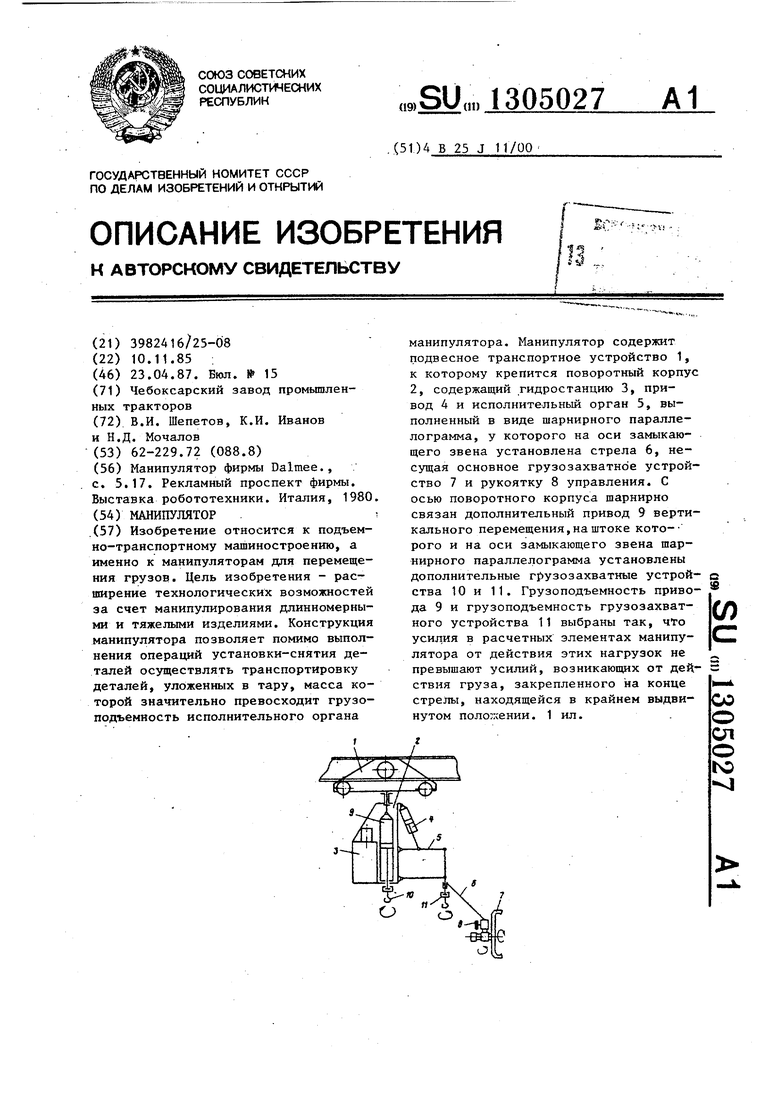
На чертеже изображена кинематическая схема манипулятора.
Манипулятор состоит из подвесного транспортного устройства 1, к которому крепится поворотный корпус 2, содержащий гидростанцию 3, привод 4 и исполнительный орган 5, выполненный в виде шарнирного параллелограмма, у которого на оси замыкающего звена установлена стрела 6, несущая основное грузозахватное устройство 7 и рукоятку 8 управления.
С осью поворотного корпуса шар- нирно связан дополнительньй привод 9 вертикального перемещения, на штоке которого и на оси замыкающего-звена шарнирного параллелограмма установлены дополнительные грузозахватные устройства 10 и 11.
Управление приводом 4 осуществляется рукояткой 8. Управление приводом транспортного устройства 1 и приводом 9 осуществляется кнопками управления, расположенными на стреле
вблизи рукоятки 8 управления. Грузо- 35 ный привод вертикального перемещения.
подъемность привода 9 и грузоподъемность грузозахватного устройства 11 выбраны так, что усилия в расчетных элементах манипулятора от действия этих нагрузок на превышают усилий.
Редактор Н. Бобкова Заказ 1373/14
Составитель А. Позняк
Техред Л.Сердюкова Корректор М.Самборская
Тираж 954 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4
возникающих от действия груза, расположенного на конце стрелы, находящейся в крайнем выдвинутом положении.
Манипулятор работает следующим образом.
Захватив с буферной площадки, гру- зозахватным устройством 10 или 11 тару с деталями, оператор устанавливает ее около технологического оборудования. Затем манипулируя грузозахватным устройством, исполнительным органом и стрелой, оператор вынимает детали из тары и устанавливает их на оборудование.
Формула изобретения
Манипулятор, содержащий подвесное транспортное устройство с поворотным корпусом, на котором установлены привод, исполнительный орган, выполненный в виде шарнирного параллелограмма, у которого на оси замыкающего звена установлена с возможностью поворота стрела, несущая основное грузозахватное устройство и органы управления, отличающийся тем, что, с целью расширения технологических возможностей за счет манипулирования длинномерными и тяжелыми изделиями, с осью поворотного корпуса шарнирно связан дополнитель
выполненный в виде силового цилиндра, на штоке которого и оси замыкающего звена шарнирного параллелограмма установлены дополнительные грузозахватные устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1337248A1 |
| Манипулятор | 1984 |
|
SU1175689A1 |
| Манипулятор | 1986 |
|
SU1458225A1 |
| Манипулятор Ильина | 1983 |
|
SU1148777A1 |
| ПОГРУЗЧИК "ПРЯМАЯ ЛОПАТА" | 1993 |
|
RU2081052C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| Подъемник-манипулятор с уравновешиванием груза (его варианты) | 1984 |
|
SU1225805A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2025454C1 |
| Уравновешивающее подъемное устройство | 1985 |
|
SU1324996A1 |
| Уравновешивающий подъемник | 1981 |
|
SU988751A1 |
| Манипулятор фирмы Dalmee., с | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Рекламный проспект фирмы | |||
| Выставка робототехники | |||
| Италия, 1980. | |||
