1
Изобретение относится к различным областям машиностроения.
Цель изобретения - упрощение конструкции при одновременном повышении надежности конструкции и безопасности оператора.
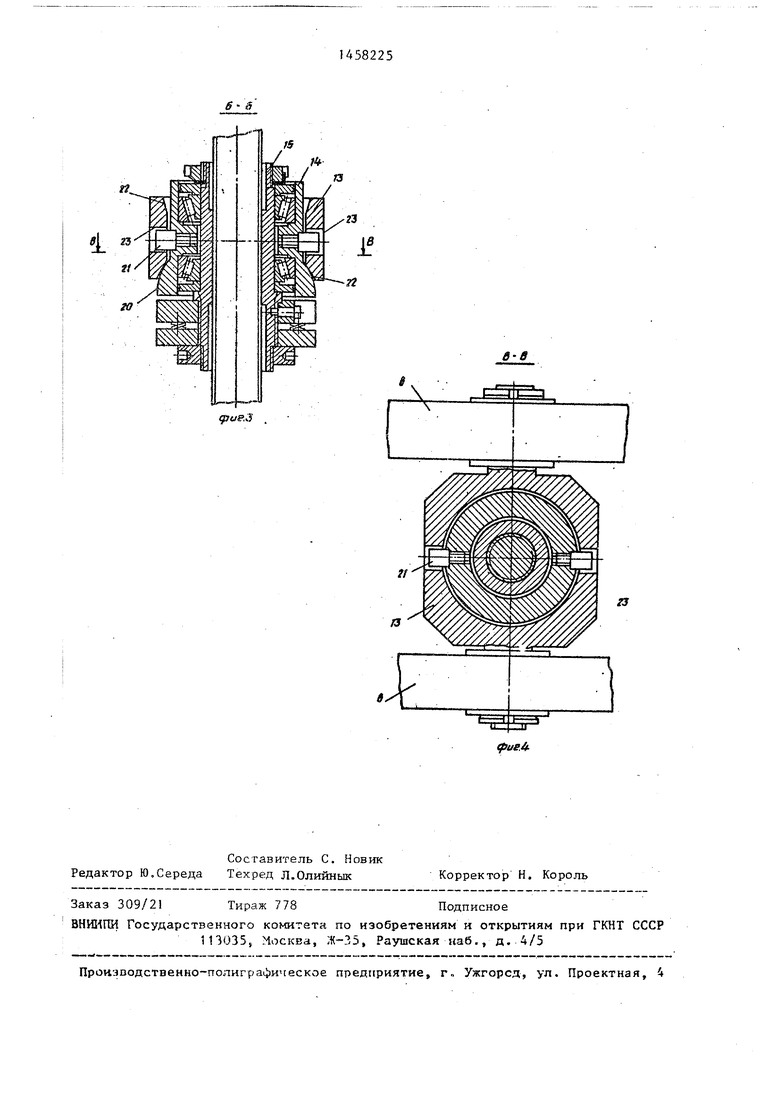
На фиг.1 схематично изображен манипулятор; на фиг.2 - разрез А-А на фиг.1; на фиг. 3 - разрез Б-Б на фиг.2; на фиг. 4 - разрез В-В на фиг. 3.
Манипулятор содержит подвесное транспортное устройство 1, на которо установлено поворотное основание 2, несущее установленную с возможностью поворота вокруг горизонтальной оси вилку 3, на кронштейнах которой установлен с возможностью качания привод 4, содержащий винтовую пару с винтом 5. К поворотному основанию шарнирно крепится исполнительный орган, вьшолненный в виде шарнирно-ры- чажного параллелограммного механизма, у которого рычаги 6 шарнирно соединены с поворотным основанием 2 и с боковым замыкающим звеном 7, на котором установлена стрела 8, несущая грузозахватное устройство 9 и ручку 10 управления. На рычагах 6 установлены упоры 11, а на поворотном основании - датчики 12 крайних положений рычагов. Верхние рычаги 6 соединены корпусом 13 (крестовиной), в центральном отверстий которого расположена полумуфта 14, установленная свободно на гайку 15 указанной винтовой пары, на шлицевом конце которо установлены прижим 16 и полумуфта 17 связанная с гайкой 15 и взаимодействующая с полумуфтой 14 посредством шариков 18 и пружин 19.
Полумуфта 14 имеет сферическую опорную поверхность 20 и пальцы 21, Корпус 13 (крестовина) имеет центральное отверстие с фасками 22 и радиальное отверстие 23. Диаметр от
верстий 23 больше диаметров пальцев 21 на величину, обеспечивающую самоустановку полумуфты 14 относительно винта 5 при сохранении ее связи с корпусом 13 (крестовиной).
Манипулятор работает следующим образом.
При отклонении ручки управления вверх (для поднятия груза) или вниз (для опускания груза) включается . электродвигатель привода (не пока- зан), вращение от электродвигателя через редуктор передается на винт 5, который, вза1 одействуя с гайкой 15, поднимает или опускает исполнитель- ньй орган. В крайних положениях исполнительного органа электродвигатель отключается датчиками 12. При пере- грузке манипулятора или при упоре грузозахватного устройства в препятствие возрастает грузовой момент в винтовой паре, шарики 18 отжимаются от верхней полумуфты 14 и гайка 15 совместно с полумуфтой 17 начинает вращаться совместно с винтом 5 относительно полумуфты 14, в результате чего подъем или опускание исполнительного органа прекращается, т.е. устраняется аварийная ситуация. При этом кинематическая связь исполнительного органа с приводом легко восстанавливается .
Формула изоб ре те ния
Манипулятор, содержащий поворотное основание, привод- с винтовой парой и шарнирно связанный с основанием исполнительный орган, вьшолненный в виде шарнирно-рычажного параллелограммного механизма, на боковом звене которого с возможностью поворота установлены грузозахватное устройство и ручка управления, о тличающийся тем , что, с це-. лью упрощения конструкции при одно
временном повышении надежности конструкции и безопасности оператора, он снабжен предохранительным устройством, выполненным в виде крестовины, имеющей центральное и радиальные отверстия, и двух полумуфт, взаимо- действую-дих между собой через подпру- . жиненные шарики, причем одна из .полу-.
а другая свободно расположе этой гайке и имеет сферичес ную поверхность и радиально женные пальцы, взаимодейств ответственно с фаской центр отверстия и с радиальными о ми крестовины, при этом диа диальных отверстий крестови
муфт связана с гайкой винтовой пары, ю диаметра пальцев полумуфты.
а другая свободно расположена на этой гайке и имеет сферическую опорную поверхность и радиально расположенные пальцы, взаимодействующие соответственно с фаской центрального отверстия и с радиальными отверстиями крестовины, при этом диаметр радиальных отверстий крестовины больше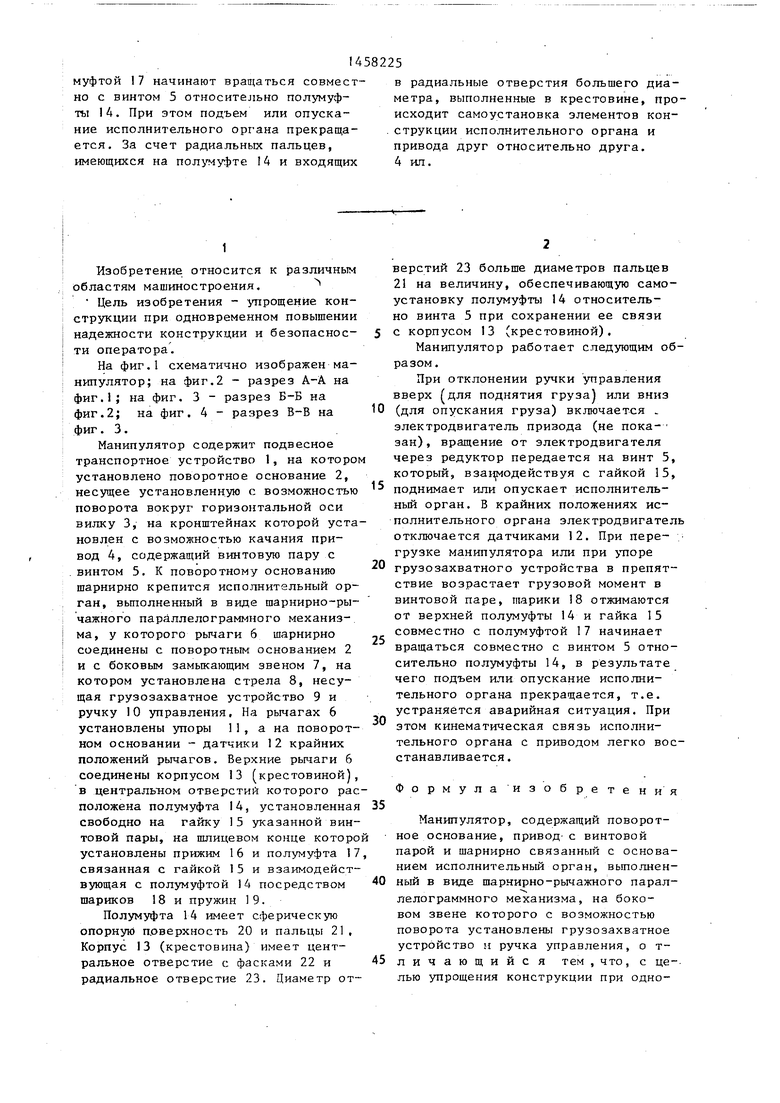
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| Кран-манипулятор | 1989 |
|
SU1634624A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ МАНИПУЛЯТОР | 1999 |
|
RU2166846C2 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| Манипулятор | 1985 |
|
SU1288045A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168456C1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
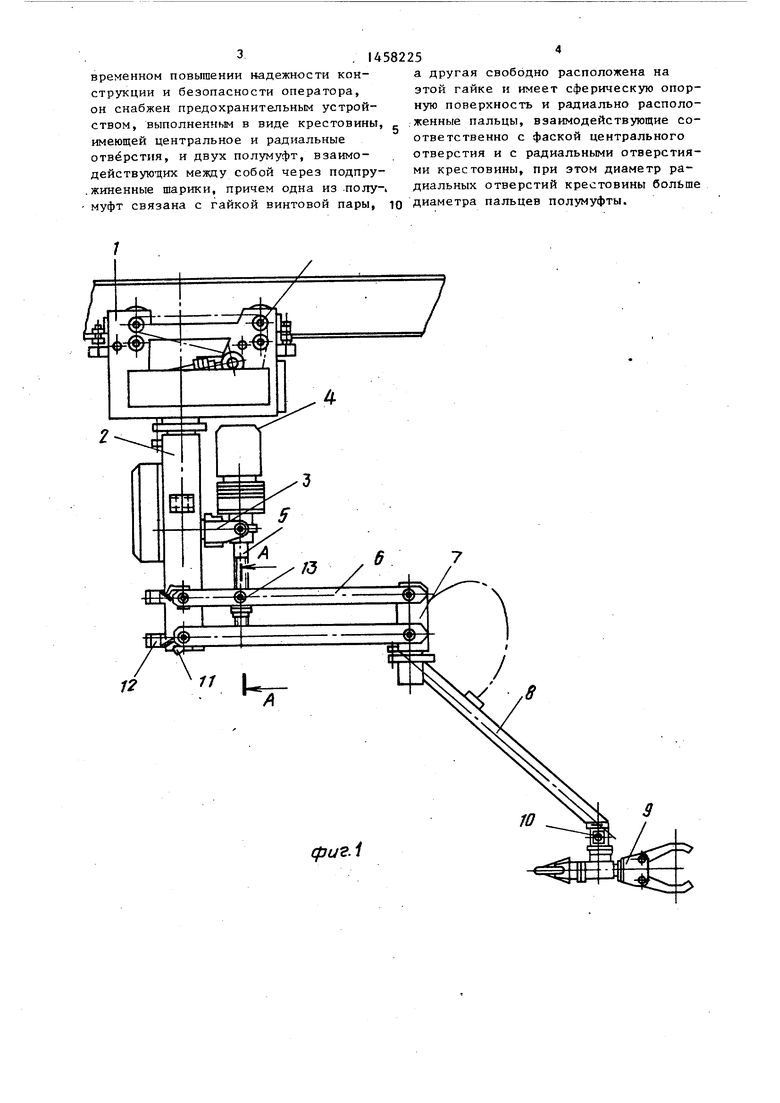
Изобретение относится к машиностроению. Цель изобретения - упрощение конструкции при одновременном повышении надежности конструкции и безопасности оператора. При возникновении аварийной ситуации в процессе работы манипулятора; например при упоре грузозахватного устройства исполнительного органа в препятствие, шарики 18 отжимаются от верхней полумуфты 14, расположенной в центральном отверстии корпуса 13 (крестовины) , и гайка 15 совместно с полу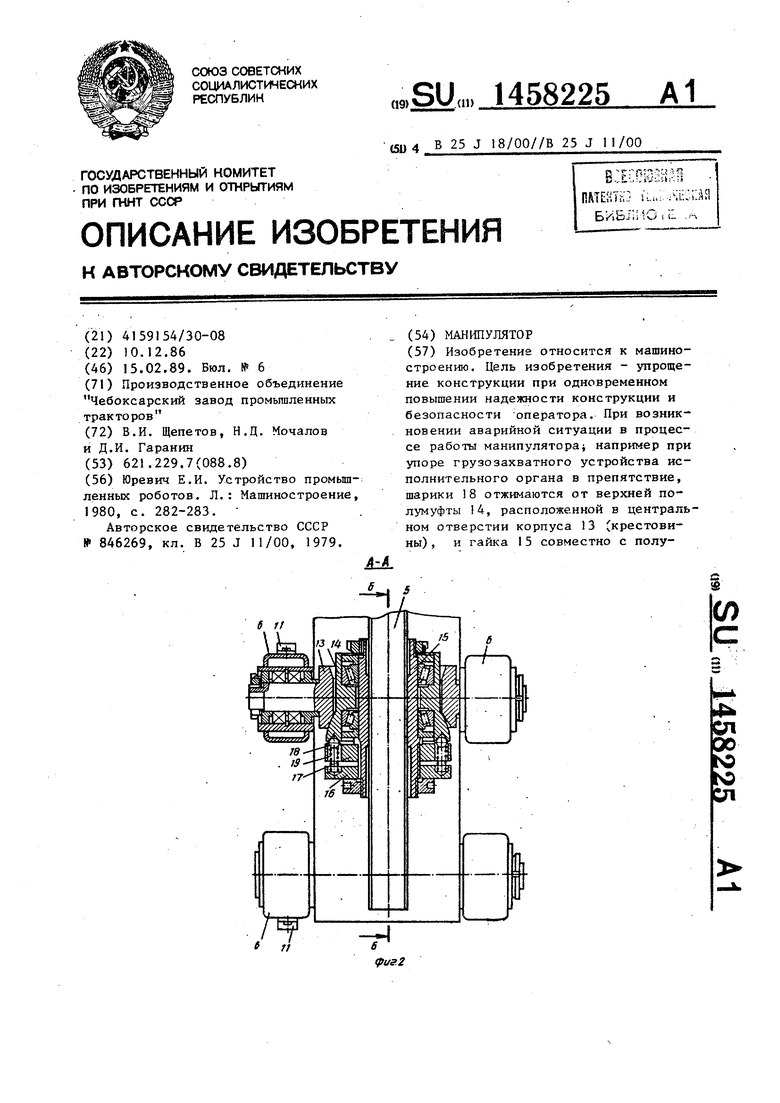
12
fS
/
0
q}ue.3
6-e
| Юревич Е.И | |||
| Устройство промышленных роботов | |||
| Л.: Машиностроение, 1980, с | |||
| ПОРШНЕВОЙ ДВИГАТЕЛЬ | 1916 |
|
SU282A1 |
| Манипулятор | 1979 |
|
SU846269A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
