Изобретение относится к подъемно- транспортному машиностроению, а именно к манипуляторам для перемещения грузов,- и может быть использовано в различных отраслях промышленности.
Целью изобретения является повышение производительности за счет совмещения операций установки-снятия заготовок на технологическом оборудовании, а также их транспортировки.
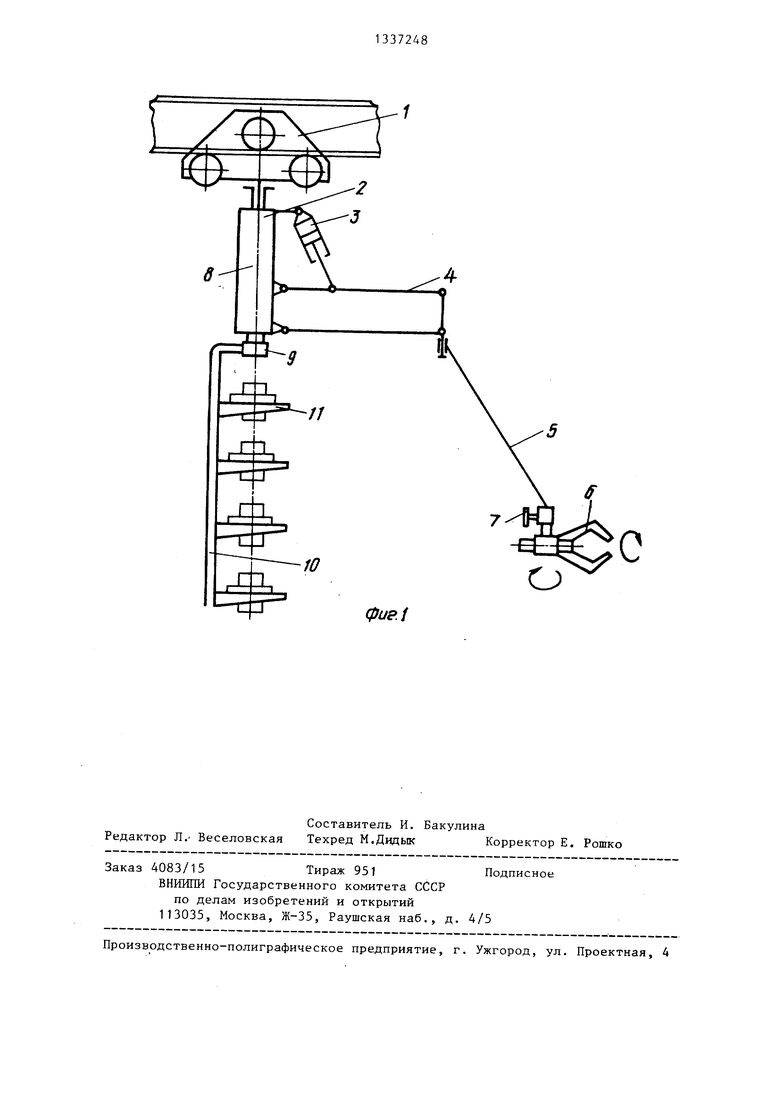
На фиг. 1 изображена кинематическая схема манипулятора с накопителями; на фиг. 2 - то же, с дополнительным грузозахватным устройством.
Манипулятор состоит из подвесного транспортного устройства 1, поворотного корпуса 2, на котором установлены привод 3 и исполнительный орган 4, выполненный в виде шарнирного параллелограмма, на за-- мыкающем звене которого установлена с возможностью поворота вокруг вертикальной оси стрела 5, несущая грузозахватное устройство 6 и орган управления, например, рукоятку 7 управления. В поворотном корпусе 2 размещен дополнительно привод вертикального перемещения, выполненньш в виде силового цилиндра 8, на штоке которого имеется соединительный элемент 9. С соединительным злементом 9 силового цилиндра 8 связан накопитель 10, имеющий опорные поверхности 11 для заготовок (деталей), расположенные в зоне обслуживания исполнительного органа 4 манипулятора. Кроме того, на соединительным элементе 9 силового цилиндра 8 может быть закреплено дополнительное грузозахватное устройство, например крюковая подвеска 12.
Манипулятор работает следующим образом.
Оператор на буферной площадке линии, манипулируя грузозахватным устройством 6, рукояткой 7 управления и стрелой 5 устанавливает заготовки на опорные поверхности 11 на372482
копителя 10. Затем последовательно передвигая манипулятор от одного станка к другому, захватное устрой-, ство 6 исполнительного органа 4 снимает заготовки из накопителя 10 и устанавливает их на станки. Если с соединительным элементом 9 силового цилиндра 8 связано дополнительное
0 грузозахватное устройство 12, действуют следующим образом.
Захватив крюковой подвеской 12 с буферной площадки тару с заготовками,- устанавливают ее около тех15 нологического оборудования и затем, манипулируя рукояткой 7 управления, грузозахватным устройством 6 и стрелой 5 вынимают заготовки из тары и устанавливают на
20 технологическое оборудование (станок) .
Манипулятор целесообразно использовать для обслуживания однотипных металлорежущих станков, установлен25 ных в линию, что позволит сократить время обслуживания технологического оборудования и .высвободит мостовые краны.
3Q Формула изобретения
Манипулятор, содержащий подвесное транспортное устройство с поворотным корпусом, на котором установлены привод и исполнительный орган, выполненньм в виде шарнирного параллелограмма, у которого на оси замыкающего звена ус гановлена с возможностью поворота стрела, несущая грузо40 захватное устройство и органы управления, при этом в поворотном корпусе размещен дополнительно привод вертикального перемещения, выполненный в виде силового цилиндра, на штоке кото.р. рого имеется соединительньш элемент, отличающийся тем, что, с целью повьшения производительности, он снабжен накопителем, связанным с соединительным элементом привода вертикального перемещения и имеющим опорные поверхности для заготовок, распо- поженные в зоне обслуживания исполнительного органа
35
фир.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1305027A1 |
| Манипулятор для проведения грузовых работ | 1976 |
|
SU674970A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158207C1 |
| КРАН-МАНИПУЛЯТОР | 1992 |
|
RU2053191C1 |
| КРАН-МАНИПУЛЯТОР | 2001 |
|
RU2207317C1 |
Изобретение относится к подъемно-транспортному машиностроению, а именно к манипуляторам для перемещения грузов. Целью изобретения является повьшение производительности за счет совмещения операций установки-снятия заготовок на техноло1 гическом оборудовании, а также их транспортировки. Для этого на поворотном корпусе 2 имеется дополнительный привод 8 вертикального перемещения, на штоке которого размещен соединительный элемент 9 для закрепления накопителя или дополнительного грузозахватного устройства 12. Кроме того, на поворотном корпусе 2 установлены привод 3 и исполнительный орган 4. При передвижении манипулятора от одного станка к другому заготовки исполнительным органом 4 снимают из накопителя и устанавливают на станок или выбирают заготовки из тары, перемещаемой дополнительным грузозахватным устройством 12. 2 ил. fi (Л о фиг 2
| Манипулятор | 1985 |
|
SU1305027A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
