Изобретение относится к подъем но-транспортному машиностроению, а именно к манипуляторам для перемещения грузов, и может быть использовано в различных отраслях промышЛенности. Цель изобретения - увеличение высоты зоны обслуживания манипулято ра. На фиг.1 изображена кинематичес кая схема манипулятора в двух крайних положениях - верхнем и нижнем; на фиг.2 - В1ад А на фиг.1. Манипзшятор состоит из установленного на колонне поворотного основания 1, на котором закреплены привод 2 и исполнительный орган 3. В замыкающем звене исполнительного органа - корпуса 4, установлена пустотелая ось 5, 1есущая стрелу 6 выполненнуюв виде шарнирного параллелограмма. Верхний рычаг 7 осно вного параллелограмма и верхний рычаг 8 параллелограмма стрелы соединены тягой 9, проходящей, через пустотелую ось, На замыкающем звене параллелограмма стрелы установлены рукоятка 10 управления приводом и 892 1рузозахватное устройство II. Тяга 9 состоит из трех звеньев. Верхнее звено выполнено, например, в виде вилки 12, щарнирно соединенной с корпусом 13, в котором установлен опорньй подшипник 14, на который опирается среднее звено тяги 9. Манипулятор работает следующим образом. При повороте рукоятки 10 вниз привод 2 включается на опускание исполнительного органа 3. При этом рычаг 7 через тягу 9 отклоняет вниз рычаг 8 шарнирного параллелограмма 6. Опускание грузозахватного устройства 11 происходит до тех пор, пока рукоятка удерживается в нижнем положении. При переводе рукоятки в среднее положение привод останавливается и опускание прекрап1ается. При повороте рукоятки вверх производится подъём грузозахватного устройства 1I, Поворот стрелы относительно исполнительного органа и поворот всего манипулятора вокруг колонны производится усилием руки оператора.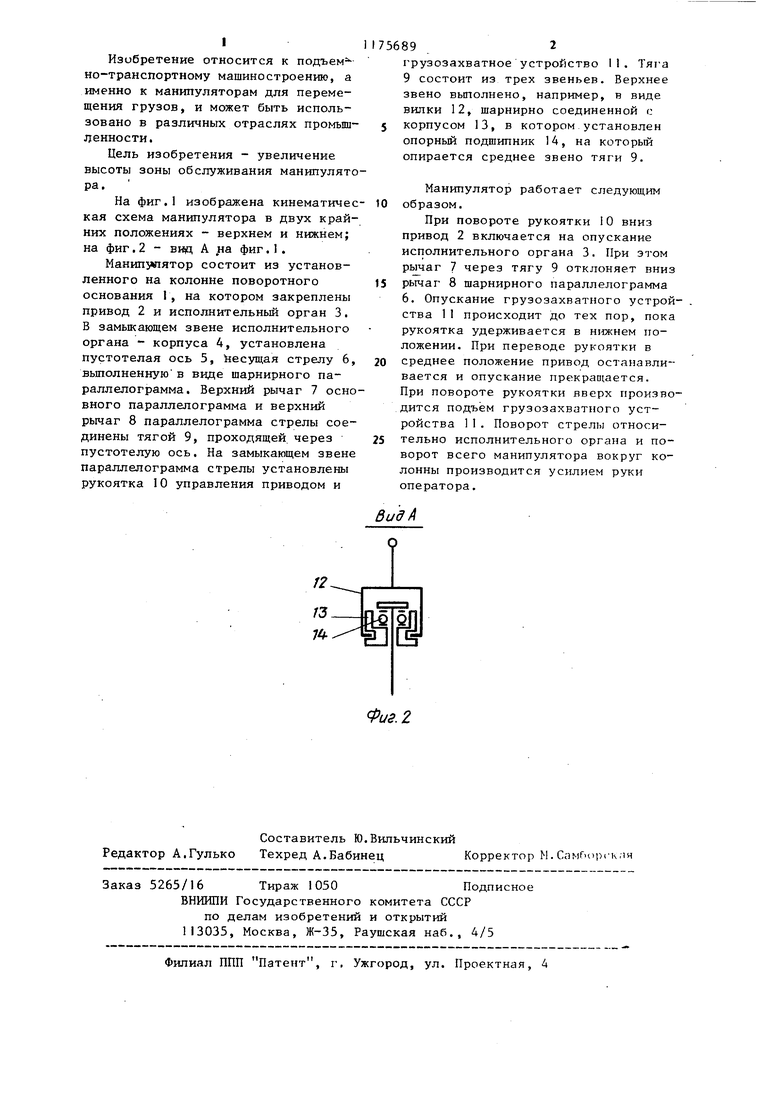
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1337248A1 |
| Манипулятор | 1985 |
|
SU1305027A1 |
| Уравновешивающий подъемник | 1981 |
|
SU988751A1 |
| Кран-манипулятор | 1989 |
|
SU1634624A1 |
| ПОГРУЗЧИК "ПРЯМАЯ ЛОПАТА" | 1993 |
|
RU2081052C1 |
| Манипулятор | 1988 |
|
SU1571930A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| Манипулятор | 1986 |
|
SU1458225A1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| Уравновешивающий подъемник | 1985 |
|
SU1271818A1 |
МАНИПУЛЯТОР, содержащий поворотное основание, на котором установлены привод и исполнительный орган, выполненный в виде основног-о шарнирного параллелограмма, на за} 2 3 7 Л мыкающем звене которого установлены корпус и стрела, имеющая возможность поворота вокруг вертикальной оси и несущая грузозахватное устройство и рукоятку управления, о т л и ч а ю щ и и с я тем, что, с целью увеличения высоты зоны обслуживания, он снабжен расположенной в корпусе пустотелой осью с расположенной в ней вертикальной тягой, а стрепа выполнена в виде шарнирного параллелограмма, закрепленного па пустотелой оси, причем тяга шарнирно связана с верхними рычаа-ами обоих р параллелограммов. (Л с: СП 00 со
| Манипулятор Posimat В, рекламный проспект фирмы FUSliS;OPr, 1983. |
