(54) УРАВНОВЕШИВАЮЩИЙ ПОДЪЕМНИК
| название | год | авторы | номер документа |
|---|---|---|---|
| Уравновешивающий подъемник | 1985 |
|
SU1271818A1 |
| Уравновешивающий подъемник | 1982 |
|
SU1039861A1 |
| Уравновешивающий подъемник | 1981 |
|
SU979263A1 |
| Уравновешивающий подъемник | 1984 |
|
SU1184799A1 |
| Уравновешивающий подъемник | 1979 |
|
SU931672A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1119969A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1162739A1 |
| Подъемник-манипулятор с уравновешиванием груза (его варианты) | 1984 |
|
SU1225805A1 |
| Система управления уравновешивающим подъемником | 1980 |
|
SU895904A2 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
1
Изобретение относится к подъемнотранспортному оборудованию, а именно к уравновешиваюпдим подъемникам.
Известен уравновешивающий подъемник, содержащий стойку, грузовую стрелу в виде двух сочлененных под углом друг к другу щарнирных параллелограммов, один из которых закреплен на стойке, и тяги, посредством которой второй параллелограмм связан со стойкой, привод, датчик массы, установленный на конце второго параллелограмма, и грузозахватный орган, установленный с возможностью вертикального перемещения на датчике массы и взаимодействующий с его чувствительным элементом 1.
Недостатком этого подъемника являются его ограниченные технологические возможности, поскольку он может уравновещивать груз, если центр тяжести последнего совпадает с вертикальной осью датчика массы (осью чувствительного элемента). Перемещать груз, навешенный консольно по отйощению к вертикальной оси датчика массы, известный подъемник не может.
Цель изобретения - расширение технологических возможностей подъемника путем обеспечения уравйовещи ания груза, расположенного консольно. по отношению к датчику.
Поставленная цель достигается тем, что в известном устройстве подъемник снабжен корпусом с направляющими, который смонтирован на нижнем звене второго параллелограмма и в котором жестко закреплен датчик массы, при этом грузозахватный орган включает установленную в направляющих корпуса каретку с закрепленным на ней захватом.
10
Каретка может быть связана с корпусом посредством по крайней мере одной вертикальной пары катков, установленны.ч с интервалом в направляющих корпуса.
Корпус может быть закреплен на па15 раллелограмме с возможностью вращения вокруг вертикальной оси посредством вертлюга.
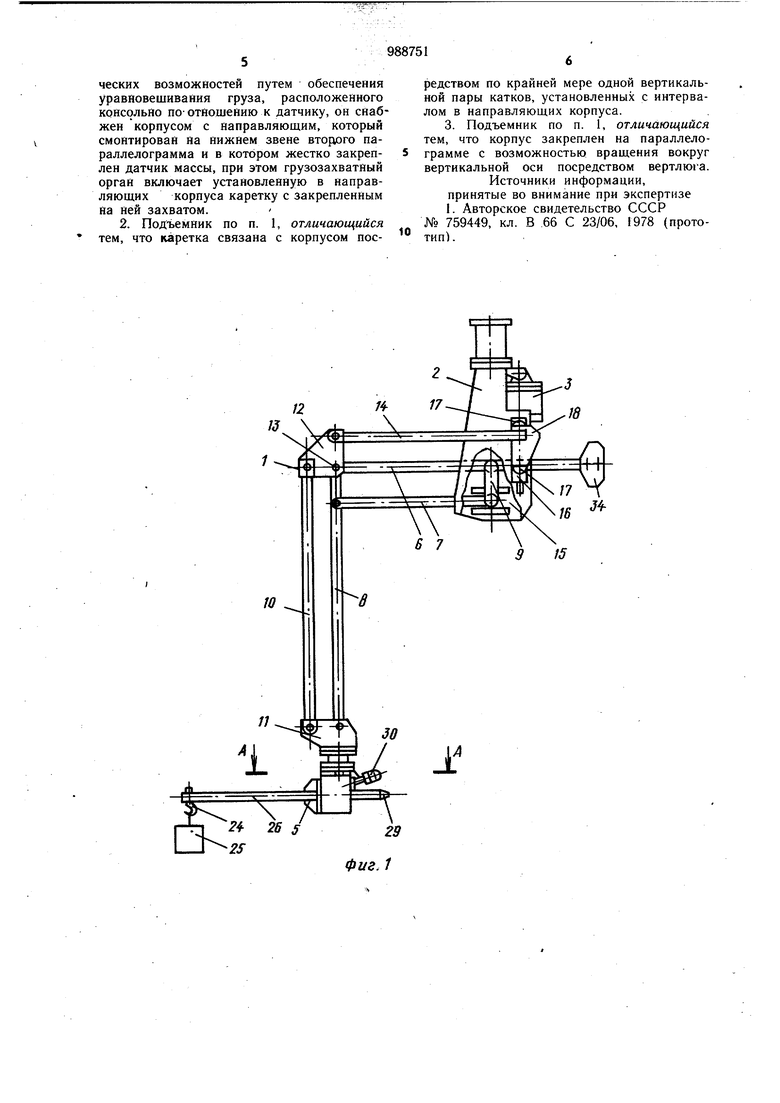
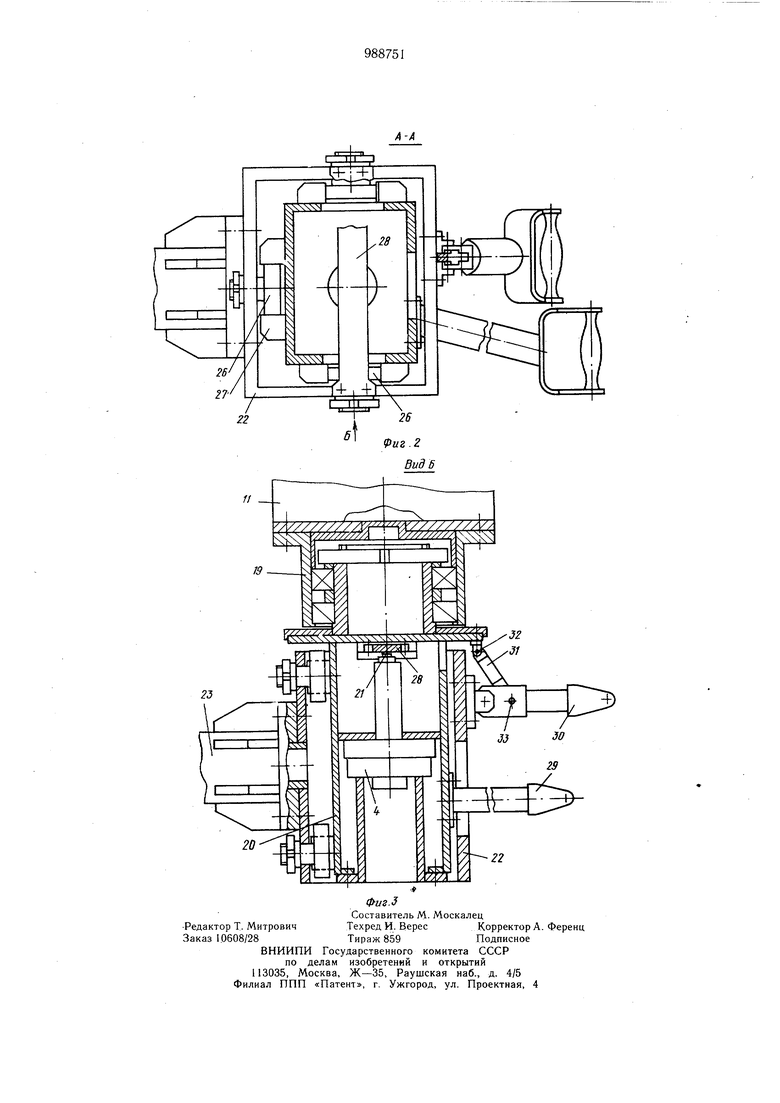
На фиг. 1 представлен подъемник, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 2.
20
Уравновешивающий подъемник содержит грузовую стрелу 1, закрепленную на стойке 2, привод, в частности силовой цилиндр 3, датчик 4 массы грузозахватный орган 5.
Грузовая стрела 1 содержит два сочлененных под углом друг к другу шарнирных параллелограмма, один из которых, поперечный, образован из рычагов 6-9, а другой, продольный, из рычагов 8, 10-12, причем рычаг 8 и шарнир 13 являются обШ.ИМИ для обоих, а также тягу 14. Поперечный параллелограмм шарнирно установлен в горизонтальном 15 и вертикальном 16 пазах стойки 2, а тяга 14 установлена параллельно этому параллелограмму и соединяет второй, продольный, параллелограмм, а именно его рычаг 12, с вертикальным пазом 16. Каретки 17 рычага 6 и тяги 14 соединены между собой косынкой 18 для сохранения между ними постоянного интервала.
На рычаге 11 продольного параллелограмма жестко закреплено основание вертлк. 19, а на поворотной части последнего жестко закреплен корпус 20, внутри которого жестко закреплен датчик 4 массы с чувствительным элементом 21.
Грузозахватный орган 5 выполнен в виде каретки 22, на которой жестко закреплена консоль 23, На конце которой установлен захват 24 для груза 25.
Каретка 22 снабжена катками 26, которые установлены в вертикальных направляющих 27, выполненных на корпусе 20. Направляющих 27 может быть одна и более (в предлагаемом варианте их три) и в каждой из них установлено с интервалом по вертикали два катка 26. Каретка 22 имеет верхнюю горизонтальную планку 28, взаимодействующую с чувствительным элементом 21 датчика 4 массы.
На корпусе 20 неподвижно закреплена рукоятка 29, а на каретке 22 шарнирно установлена ручка 30, которая посредством тяги 31 и шарниров 32 и 33 связана с кор iycoM 20.
Уравновешивающий подъемник работает следующим образом.
Масса стрелы уравновешена противовесом 34. Масса грузозахватного органа 5 и груза 25 через планку 28 воздействует 1-а чувствительный элемент 21 датчика 4 массы и автоматически уравновешивается давлением в цилиндре 3. При этом нагрузка (масса груза и грузозахватного органа) приложена консольно, т. е. смещена относительно оси датчика 4.
Нагрузка через катки 26 передается на корпус 20, а поскольку тот неподвижен в вертикальном направлении относительно рычага 11, то нагрузка передается на продольный параллелограмм, один рычаг которого работает на сжатие, а другой - на растяжение, затем - на поперечный параллелограмм и тягу 14 и через катки 17 - на стойку 2. Величина консоли зависит от . жесткости системы рычагов стрелы 1 и стойки 2.
Горизонтальное перемещение стрелы 1 осуществляют за рукоятку 29. При подъеме и опускании груза для уменьшения усилия, возникающего для преодоления силы трения в шарнирах параллелограммов и манжет цилиндра, оператор, поворачивая ручку 30 вверх (при подъеме груза) или вниз (при опускании), дополнительно воздействует на элемент 21, при этом автоматически увеличивается или уменьшается, соответственно давление в цилиндре, что при постоянной массе груза приводит к подъему или опусканию последнего, которое прекращается в момент возвращения ручки 30 в нейтральное положение.
Захват 24 может быть расположен и не
на консоли, а прикреплен неподвижно к нижней части каретки 22, что необходимо, например, для перемещения груза, центр тяжести которого совпадает с осью датчика 4 или груза со смещенным центром тяжести в зафиксированном, например горизонтальном, положении.
Датчик 4 массы и грузозахватный орган 5 установлены на стреле 1 с возможностью поворота в горизонтальной плоскости, однако как частный случай, возможно их
неподвижное крепление.
Каретка 22 может быть установлена на корпусе 20 посредством ползунов, выполняющих ту же функцию, что и катки 2Ь. Каретка 22 может быть выполнена в виде
втулки, скользяще посаженной на корпус 20. В уравновешивающем подъемнике по сравнению с известным обеспечена возможность перемещения груза на консоли, что позволяет обслуживать труднодоступные места типа нищ (например в прессах, печах)
и нести груз на расстоянии от оператора (что особенно важно в части техники безопасности, когда грузом, например, является ковщ с расплавленным металлом), так же обеспечена возможность фиксировать перемещаемый груз в любом положеНИИ относительно грузозахватного органа, что расширяет возможность использования подъемника на загрузке станков и сборочных работах.
Формула изобретения
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 759449, кл. В .66 С 23/06, 1978 (прототип).
