Изобретение относится к подъемно-транспортному машиностроению.
Цель изобретения - повышение удобства эксплуатации.
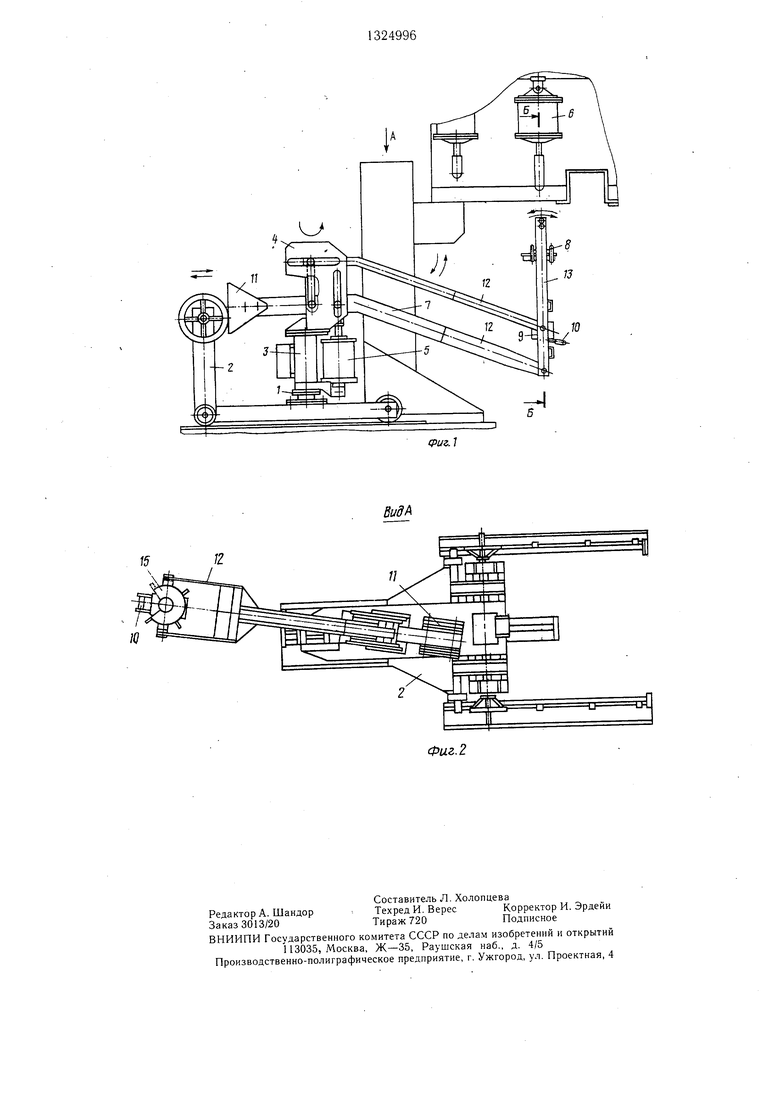
На фиг. I йоказано уравновешиваюшее подъемное устройство, обший вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
УравноЕ ешиваюшее подъемное устройство содержит стойку 1, размешенную на подвижной тележке 2. На стойке 1 с возможностью вращения установлен корпус 3 устройства со гЦеками 4, выполненными с го- ризонтальныМи и вертикальными пазами. На корпусе 3 установлен силовой цилиндр 5, который уравновешивает груз 6 в момент его принятия и транспортировки.
Между ш.еками 4 корпуса 3 смонтирована грузовая стрела 7, выполненная в виде шарнирного параллелограмма, с- грузозахватным устройством 8, оборудованным датчиком 9 массы с рукояткой 10 управления. На грузовой стреле 7 закреплен противовес 11
Длинные рычаги параллелограмма в своем конце выполнены в виде вилок 12, шар- нирно скрепленных между собой двумя грузовыми рычагами 13, направленными от грузовой стрелы 7 вверх.
Грузозахватное устройство 8 выполнен) в виде U-образного ложемента 14 со смонтированной на его дне враш,ающейся приемной платформой 15.
Поворотная платформа 15 представляет собой приемную поверхность, выполненную с вырезным кольцевым сектором, сл ужащим для прохода штока цилиндра при его загрузке и выгрузке. Платформа поворачивается вручную на упорных роликах ложемента 14 в горизонтальной плоскости. Врашение платформы обеспечивает манипуляцию груза (цилиндра) при его навеске на вагон-хоппер-дозатор (заводка пальца в отверстие).
Ложемент 14 установлен вертикально подвижно в подвеске 16, что позволяет его нижней части постоянно воздействовать на чувствительный элемент датчика 9 массы. Датчик 9 с рукояткой 10 управления непосредственно закреплен на подвеске 16 в нижней его части. Подвеска 16, в свою очередь, закреплена с возможностью поворота между двумя грузовыми рычагами 13.
Устройство работает следующим образом.
При помощи подвижной тележки 2 устройство подводится в рабочую зону под хоппер-дозаторВый вагон, поднятый на дом
кратах (поточная линия ремонта хоппер-дозаторов) .
Уравновешивание устройства без груза производится противовесом 11. Рукояткой
10 управления грузозахватное устройство 8 подводится под снимаемый груз 6.
Груз 6 устанавливается в приемную платформу 15 ложемента 14. Масса груза 6 через ложемент 14 воздействует на чувствительный элемент л1,атчика 9 массы и автоматически уравновешивается давлением в цилиндре 5. Для подъема или опускания груза оператор, поворачивая рукоятку 10 управления вверх при подъеме груза или вниз (при опускании), дополнительно воздействует на чувствительный элемент датчика 9 массы, при этом автоматически увеличивается или уменьшается, соответственно, давление в цилиндре, что при неизменной массе груза приводит к подъему или опусканию последнего, которое прекрашается в момент возвращения рукоятки в нейтральное положение.
Формула изобретения .
Уравновешивающее подъемное устрой- стЕю, содержащее стойку с установленным на ней корпусом со щеками, выполненными с вертикальным и горизонтальным пазами, силовой цилиндр, |-рузовую стрелу в виде
шарнирного параллелограмма, образованно- i o звеньями, на продолжении бoльпJeгo звена, соединенного с вертикальным пазом, установлен противовес, а продолжение меньшего звена, соединяющего большие звенья между собой, представляет собой рычаг,
несуший грузозахватное устройство с датчиком массы, отличающееся тем, что, с целью повышения удобства эксплуатации, оно снабжено дополнительным рычагом, установленным параллельно первому рычагу с возможностью размещения между ними грузозахватного устройства, при этом нижние концы обоих рычагов соединены с концами больших звеньев параллелограмма, а грузозахватное устройство содержит подвеску, установленную с возможностью поворота на
осях, закрепленных в верхней части каждого из рЕ)1чагов, в нижней части которой смонтирован датчик массы, U-образный ложемент, установленный в подвеске с возможностью вертикального перемещения и взаимодействия с датчиком массы и снабженный
приемной платформой, поворотной в горизонтальной плоскости.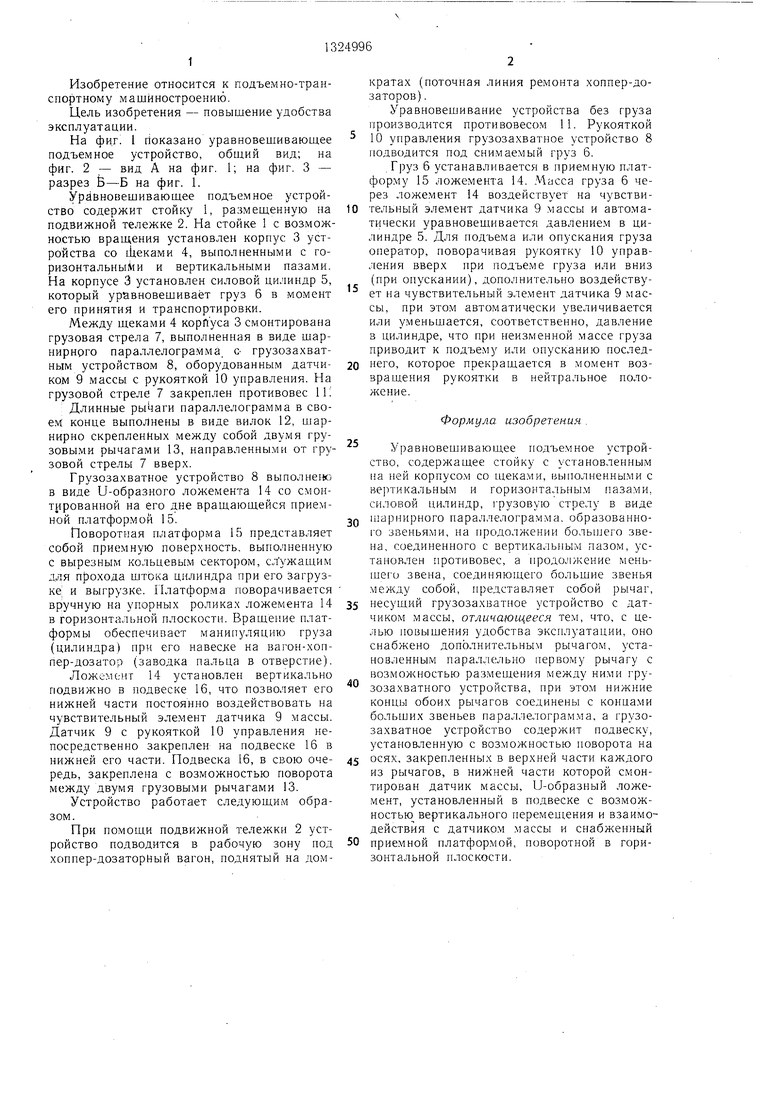
| название | год | авторы | номер документа |
|---|---|---|---|
| Уравновешивающий подъемник | 1982 |
|
SU1039861A1 |
| Уравновешивающий подъемник | 1985 |
|
SU1271818A1 |
| Уравновешивающий подъемник | 1981 |
|
SU988751A1 |
| Уравновешивающее подъемное устройство | 1976 |
|
SU655639A1 |
| Подъемник-манипулятор с уравновешиванием груза (его варианты) | 1984 |
|
SU1225805A1 |
| БАШЕННЫЙ КРАН | 2006 |
|
RU2307783C1 |
| Уравновешивающий подъемник | 1981 |
|
SU979263A1 |
| Уравновешивающее подъемное устройство | 1984 |
|
SU1253944A1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| Навесное устройство к грузоподъемной машине | 1987 |
|
SU1527140A1 |
Изобретение относится к подъемно-транспортному машиностроению. Цель изобретения - повышение удобства эксплуатации. Уравновешивающее подъемное устройство содержит стойку, размеш,енную на подвижной тележке. На стойке установлен поворотный корпус со ш,еками, выполненными с горизонтальными и вертикальными пазами, в которых размещена стрела. Стрела выполнена в виде шарнирного параллелограмма, образованного звеньями. Продолжение мень шего звена, соединяющего большие звенья между собой, представляет собой рычаг, параллельно которому установлен дополнительный рычаг 13 с возможностью размещения между ними грузозахватного устройства. Нижние концы обоих рычагов соединены с концами больших звеньев параллелограмма. Грузозахватное устройство содержит подвеску 16, установленную с возможностью поворота на осях. Оси закреплены.- в верхней части каждого из рычагов 13. В нижней части подвески 16 смонтирован датчик массы 9. В подвеске установлен U-образный ложемент 14 с возможностью вертикального перемещения и взаимодействия с датчиком массы 9. Ложемент 14 снабжен приемной платформой 15, rtoBopOTHofl в горизонтальной плоскости для удобства размещения на ней груза 6. 3 ил. 6 i (Л ОО ЬО 4 ;0 СО О5 Фи&З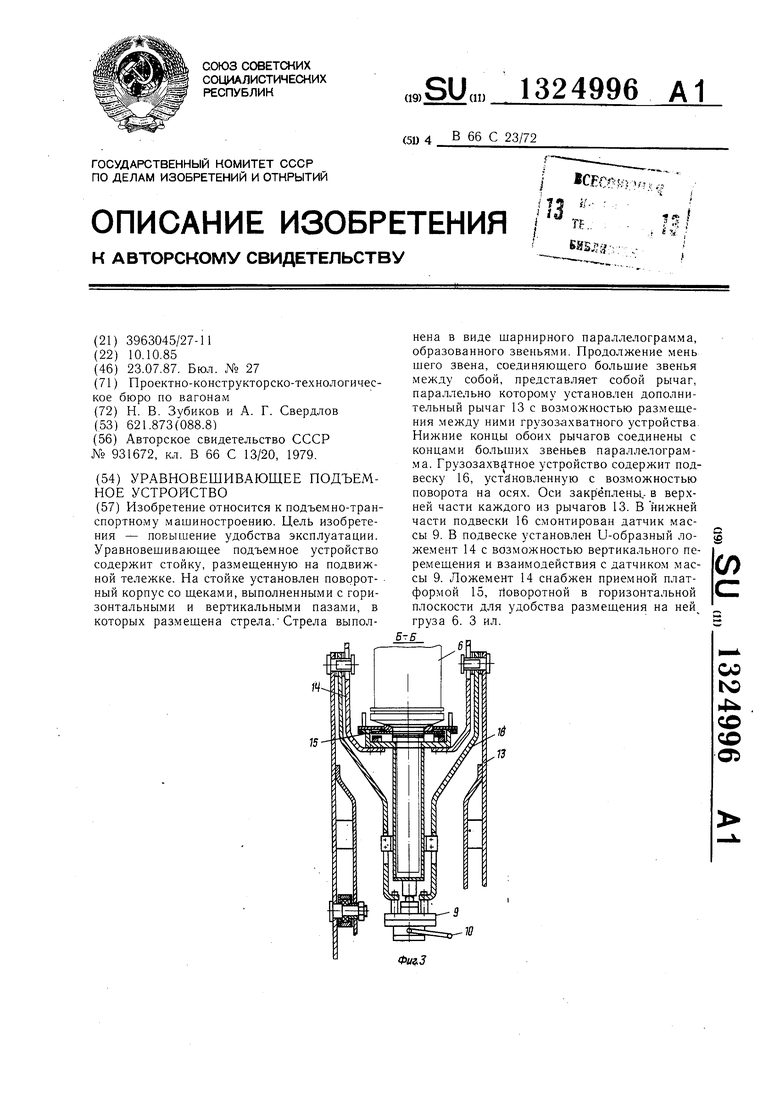
f5
J2
| Уравновешивающий подъемник | 1979 |
|
SU931672A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
