Изобретение относится к балансировочной технике и может быть использовано в балансировочных станках, автоматах и автоматических линиях.
Цель изобретения - повышение точности коррекции дисбаланса за счет компенсации нелинейной зависимости устраненного дисбаланса от рабочего перемещения инструмента при коррекции,
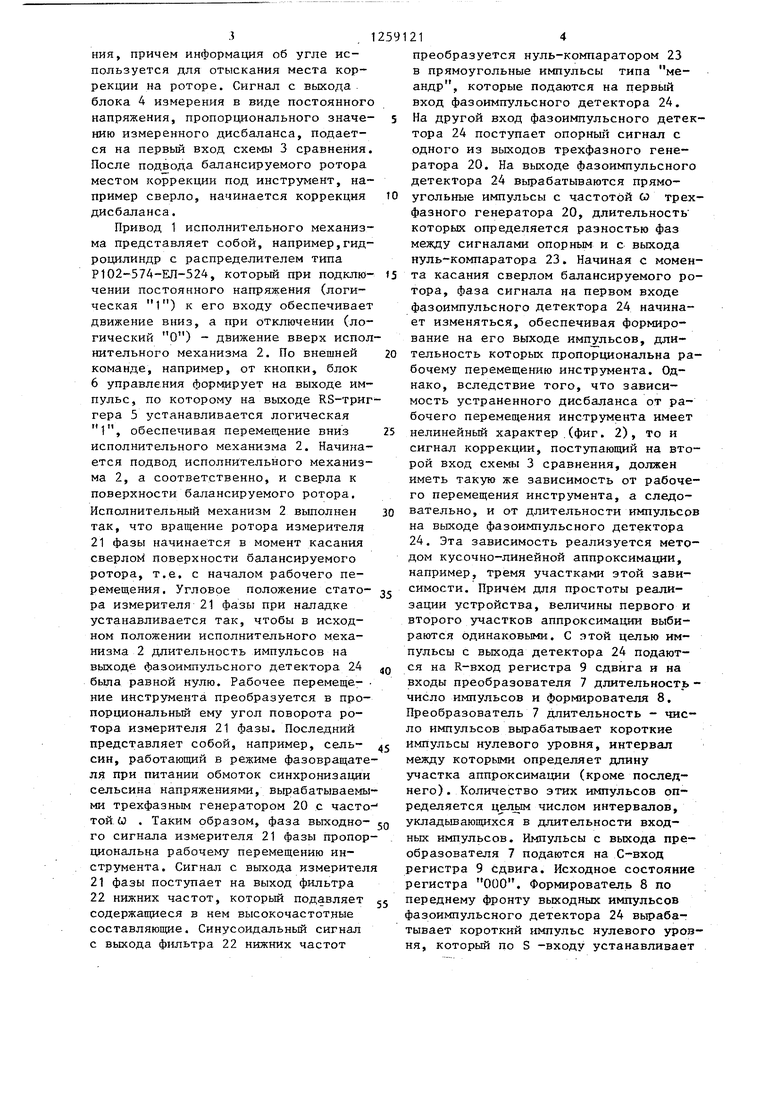
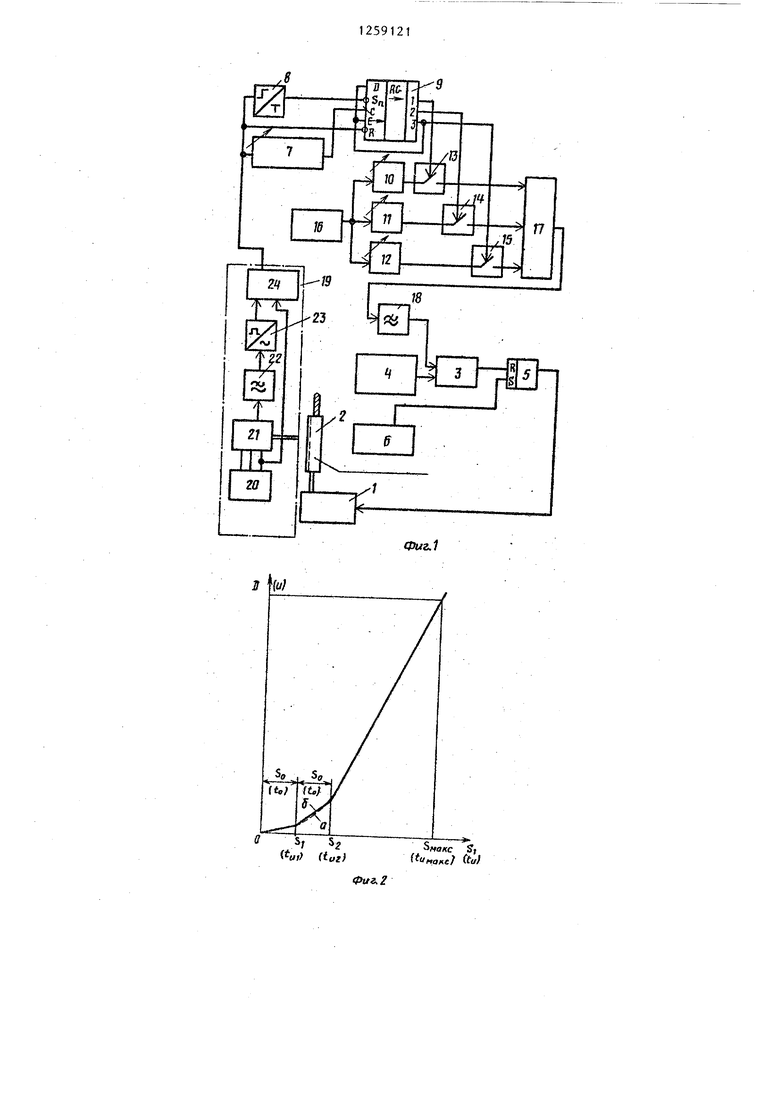
На фиг. Ьизображена структурная схема предлагаемого устройства для коррекции дисбаланса, на фиг. 2 - совмещенные графики зависимости D f(S) устраненного дисбаланса от рабочего перемещения инструмента при коррекции и зависимости V f(S)V f(t) величины сигнала коррекции от рабочего перемещения инструмента (длительности выходных импульсов фа- зоимпульсного детектора).
Обозначения S, и S указьшают величины рабочего перемещения инструмента при коррекции дисбаланса, соответствующие переходу с первого участка аппроксимации на второй и со второго на третий.
Обозначение также указывает величину перемещения инструмента при коррек1щи, соответствующую пределу измерения датчика перемещения инструмента,
Обозначения t, , t., t указьшают длительности импульсов на выходе фазоимпульсного детектора, соответствующие перемещениям инструмента S,., $2 И .
Обозначения S указьшают длину первого и второго участков кусочно- линейной аппроксимации зависимости D f(S), а tg - соответствующий S интервал времени между импульсами на выходе преобразователя длительность - число импульсов.
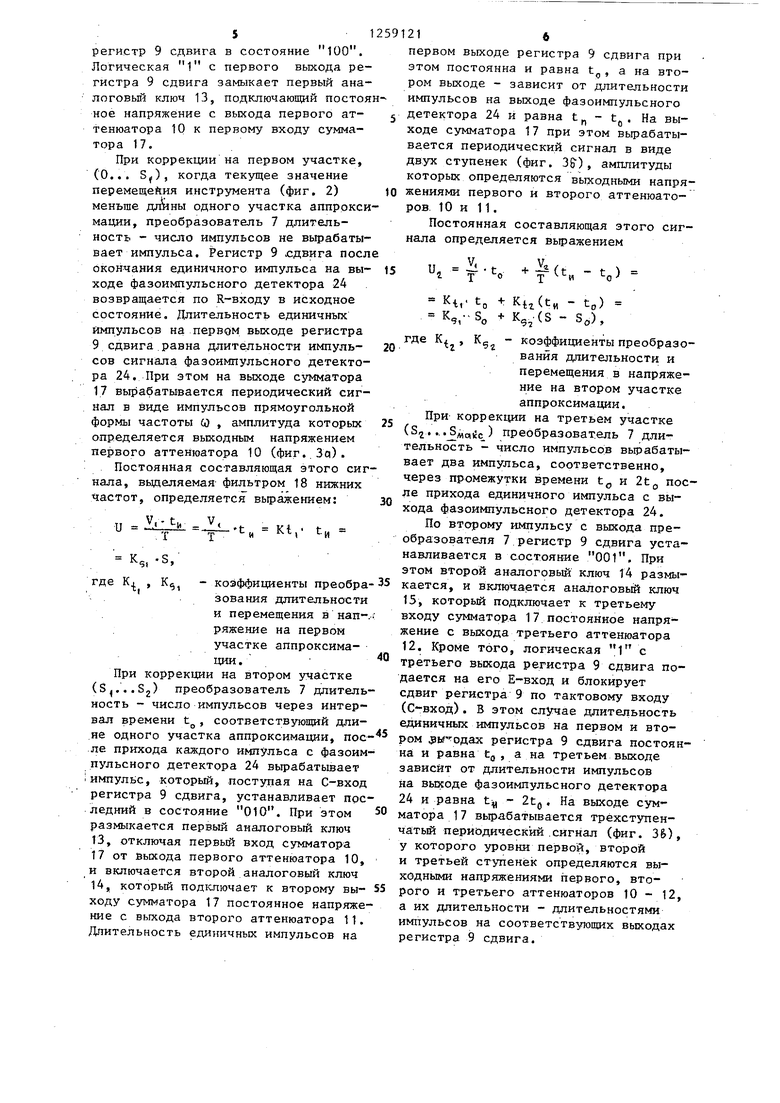
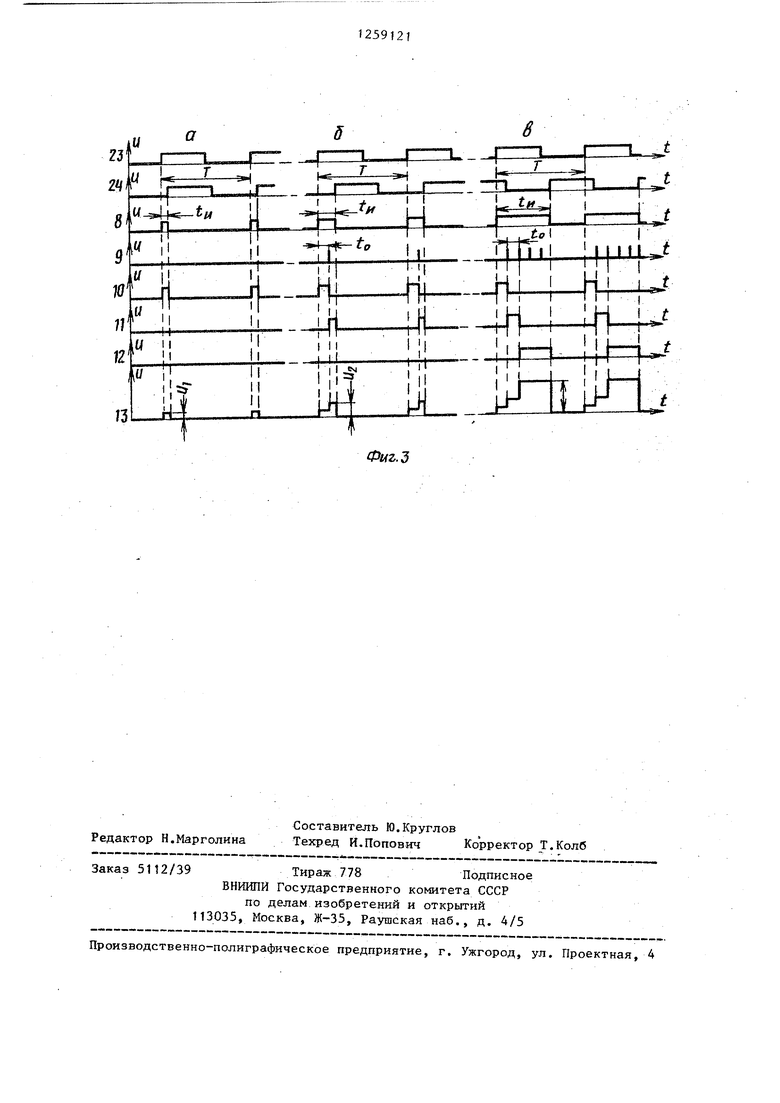
На фиг, 3 представлены временные диаграммы с указанием формы сигналов на вькодах некоторых элементов устройства при значениях рабочего перемещения инструмента, соответствующих первому (фиг. За), второму (фиг.ЗБ ) и третьему (фиг. 36) участкам аппроксимации . Цифры слева от оси ординат соответствуют номерам элементов на фиг. 1. Уровню логической 1 соответствует высокий уровень, уровню логического О - низкий.
Обозначения V,, V, V, указывают величины напряжений ня выходах соответственно первого, второго и третьего аттенюаторов. Обозначение Т указывает период сигналов на выходе трехфазного генератора.
Устройство цпя коррекции дисбаланса содержит привод 1 исполнительного механизма, исполнительный механизм 2, схему 3 сравнения, блок 4 измерения, выход которого связан с первым
входом схемы 3 сравнения, RS-триггер 5, R-вход которого связан с выходом схемы 3 сравнения, а выход - с входом привода 1 исполнительного механизма, блок 6 управления, выход KOTOрого соединен с S-входом RS-триггера 5, преобразователь 7 длительность - число импульсов, формирователь 8, регистр 9 сдвига, D и Е-входы которого связаны с его третьим выходом,
С-вход соединен с выходом преобразователя 7 длительность - число импульсов, 5„-вход - с выходом формирователя 8, три одинаковые цепи, состоя- дае каждая из последовательно включенных аттенюатора 10(11, 12) и аналогового ключа 13(14, 15), управляющие входы аналоговых ключей 13 - 15 связаны с соответствующими выходами регистра 9 сдвига, источник 16 опор-ного напряжения, выход которого связан с входами аттенюаторов 10 - 12, последовательно соединенные трехвхо- довый сумматор 17, входы которого подключены к вьасодам аналоговых ключей 13 - 15, и фильтр 18 нижних частот, связанный с вторым входом схемы 3 сравнения, и кинематически связанный с исполнительным механизмом 2 датчик 19 перемещения инструмента,
выполненный в виде трехфазного генератора 20 и последовательно соединенных измерителя 21 фазы, три входа которого соединены с соответствующими входами трехфазного генератора
20, второго фильтра 22 нижних частот, нулй-1{Ъмпаратора 23 и фазоимпульсного детектора 24, второй вход которого соединен с третьим выходом трехфазного генератора 20, а выход - с
соединенными между собой входами
преобразователя 7 длительность - число импульсов, формирователя 8 и R-входом регистра 9 Сдвига.
. Устройство работает следующим образом.
Параметры дисбапанса (угол и значение) балансируемого ротора измеряются и запоминаются блоком 4 измерения, причем информация об угле используется для отыскания места коррекции на роторе. Сигнал с выхода блока 4 измерения в виде постоянного напряжения, пропорционального знача- нию измеренного дисбаланса, подается на первый вход схемы 3 сравнения. После подвода балансируемого ротора местом коррекции под инструмент, например сверло, начинается коррекция дисбаланса.
Привод 1 исполнительного механизма представляет собой, например,гидроцилиндр с распределителем типа Р102-574-ЕЛ-524, который при подклю- чении постоянного напряжения (логическая 1) к его входу обеспечивает движение вниз, а при отключении (логический О) - движение вверх исполнительного механизма 2. По внешней команде, например, от кнопки, блок 6 управления фор№1рует на выходе импульс, по которому на выходе КЗ-триг гера 5 устанавливается логическая 1, обеспечивая перемещение вниз исполнительного механизма 2. Начинается подвод исполнительного механизма 2, а соответственно, и сверла к поверхности балансируемого ротора. Исполнительный механизм 2 выполнен так, что вращение ротора измерителя 21 фазы начинается в момент касания сверло поверхности балансируемого ротора, т.е. с началом рабочего перемещения. Угловое положение стато- ра измерителя 21 фазы при наладке устанавливается так, чтобы в исходном положении исполнительного механизма 2 длительность импульсов на вькоде фазоимпульсного детектора 24 была равной нулю. Рабочее перемеще- ние инструмента преобразуется в пропорциональный ему угол поворота ротора измерителя 21 фазы. Последний представляет собой, например, сель- сии, работающий в режиме фазовращателя при питании обмоток синхронизации сельсина напряжениями, вырабатываемыми трехфазным генератором 20 с часто той Ы . Таким образом, фаза вьпсодно- го сигнала измерителя 21 фазы пропорциональна рабочему перемещению инструмента. Сигнал с выхода измерител
21фазы поступает на выход фильтра
22нижних частот, который подавляет содержащиеся в нем высокочастотные составляющие. Синусоидальный сигнал
с выхода фильтра 22 нижних частот
преобразуется нуль-компаратором 23 в прямоугольные импульсы типа меандр, которые подаются на первый вход фазоимпульсного детектора 24. На другой вход фазоимпульсного детектора 24 поступает опорный сигнал с одного из выходов трехфазного генератора 20. На выходе фазоимпульсного детектора 24 вырабатываются прямоугольные импульсы с частотой со трехфазного генератора 20, длительность которых определяется разностью фаз между сигналами опорным и с выхода нуль-компаратора 23. Начиная с момента касания сверлом балансируемого ротора, фаза сигнала на первом входе фазоимпульсного детектора 24 начинает изменяться, обеспечивая формирование на его выходе импульсов, длительность которых пропорциональна рабочему перемещению инструмента. Однако, вследствие того, что зависимость устраненного дисбаланса от рабочего перемещения инструмента имеет нелинейный характер . (Фиг. 2), то и сигнал коррекции, поступающий на второй вход схемы 3 сравнения, должен иметь такую же зависимость от рабочего перемещения инструмента, а следовательно, и от длительности импульсов на выходе фазоимпульсного детектора 24. Эта зависимость реализуется методом кусочно-линейной аппроксимации, например, тремя участками этой зависимости. Причём для простоты реализации устройства, величины первого и второго участков аппроксимации выбираются одинаковыми. С этой целью импульсы с выхода детектора 24 подаются на R-вход регистра 9 сдвига и на входы преобразователя 7 длительность - число импульсов и формирователя 8, Преобразователь 7 длительность - число импульсов вырабатывает короткие импульсы нулевого уровня, интервал между которыми определяет длину участка аппроксимации (кроме последнего) . Количество этих импульсов определяется числом интервалов, укладьшающихся в длительности входных импульсов. Импульсы с выхода преобразователя 7 подаются на С-вход регистра 9 сдвига. Исходное состояние регистра 000. Формирователь 8 по переднему фронту выходных импульсов фазоимпульсного детектора 24 вырабатывает короткий импульс нулевого уровня, который по S -входу устанавливает
регистр 9 сдвига в состояние 100. Логическая 1 с первого выхода регистра 9 сдвига замыкает первьй ана- поговьй ключ 13, подключающий постоян ное напряжение с выхода первого аттенюатора 10 к первому входу сумматора 17.
При коррекции на первом участке, (0... Sf), когда текущее значение перемещейия инструмента (фиг. 2) меньше дгганы одного участка аппроксимации, преобразователь 7 длительность - число импульсов не вырабатывает импульса. Регистр 9 сдвига после окончания единичного импульса на выходе фазоимпульсного детектора 24 возвращается по R-входу в исходное состояние. Длительность единичных импульсов нэ первом выходе регистра 9 сдвига равна длительности импульсов сигнала фазоимпульсного детектора 24. При этом на выходе сумматора 17 вырабатывается периодический сигнал в виде импульсов прямоугольной формы частоты 0) , амплитуда которых определяется выходным напряжением первого аттенюатора 10 (фиг.,За).
Постоянная составляющая этого сиг- нала, выделяемая фильтром 18 нижних частот, определяется вьфажением:
Kl,
к„ -S,
40
де Kl , К - коэффициенты преобра- . зова кия длительности и перемещения в нап-.; ряжение на первом участке аппроксимации.
При коррекции на втором участке (Sp. .Sg) преобразователь 7 длительность - число импульсов через интервал времени t, соответствующий длине одного участка аппроксимации, пос- ле прихода каждого импульса с фазоимпульсного детектора 24 вырабатьшает импульс, который, поступая на С-вход регистра 9 сдвига, устанавливает последний в состояние 010. При этом 50 размыкается первый аналоговый ключ 13, отключая первьй вход сумматора 17 от выхода первого аттенюатора 10, и включается второй аналоговый ключ
По второму импульсу с выхода преобразователя 7 регистр 9 сдвига устанавливается в состояние 001. При этом второй аналоговый ключ Т4 размыкается, и вкл1очается аналоговьй ключ 15, который подключает к третьему входу сумматора 17 постоянное напряжение с выхода третьего аттенюатора 12. Кроме того, логическая 1 с третьего выхода регистра 9 сдвига подается на его Е-вход и блокирует сдвиг регистра 9 по тактовому входу (С-вход). В этом случае длительность единичных импульсов на первом и втором регистра 9 сдвига постоян- Hai и равна tg , а на третьем выходе зависит от длительности импульсов на выходе фазоимпульсного детектора 24 и равна tiy - 2tj . На выходе сумматора 17 вьфабатывается трёхступен- ча:тый периодический .сигнал (фиг. 3&), у которого уровни первой, второй и третьей ступенек определяются выходными напряжениями первого, вто14, который подключает к второму вы- 55 рого и третьего аттенюаторов 10 - 12,
ходу сумматора 17 постоянное напряжение с выхода второго аттенюатора 11. Длительность единичных импульсов на
а их длительности - длительностями импульсов на соответствующих выходах регистра 9 сдвига.
первом выходе регистра этом постоянна и равна
ром выходе - зависит от длительности импульсов на выходе фазоимпульсного
детектора 24 и равна t - t. На выходе сумматора 17 при этом вьфабаты- вается периодический сигнал в виде двух ступенек (фиг. З), амплитуды которых определяются выходными напряжениями первого и второго аттенюаторов. 10 и 11.
Постоянная составляющая этого сигнала определяется выражением
и, Kt,
чV,
т
H-b(t X и
Ч
t, t Kti(t« - to)
K,,(S So),
где K , Kg - коэффициенты преобразования длительности и перемещения в напряжение на втором участке аппроксимации.
При коррекции на третьем участке (Sj....A,o,iJc ) преобразователь 7 длительность - число импульсов вырабатывает два импульса, соответственно, через промежутки времени t и 2t(., после прихода единичного импульса с выхода фазоимпульсного детектора 24.
По второму импульсу с выхода преобразователя 7 регистр 9 сдвига устанавливается в состояние 001. При этом второй аналоговый ключ Т4 размыкается, и вкл1очается аналоговьй ключ 15, который подключает к третьему входу сумматора 17 постоянное напряжение с выхода третьего аттенюатора 12. Кроме того, логическая 1 с третьего выхода регистра 9 сдвига подается на его Е-вход и блокирует сдвиг регистра 9 по тактовому входу (С-вход). В этом случае длительность единичных импульсов на первом и втором регистра 9 сдвига постоян- Hai и равна tg , а на третьем выходе зависит от длительности импульсов на выходе фазоимпульсного детектора 24 и равна tiy - 2tj . На выходе сумматора 17 вьфабатывается трёхступен- ча:тый периодический .сигнал (фиг. 3&), у которого уровни первой, второй и третьей ступенек определяются выходными напряжениями первого, второго и третьего аттенюаторов 10 - 12,
а их длительности - длительностями импульсов на соответствующих выходах регистра 9 сдвига.
Ч, -о .К„ S,
t- Kt,. t,
Постоянная составляющая этого нала определяется выражением:
и. -t„ +|.t +b(t, - 2t,)
+ Kt, (tn - 2to) 5 ;,. S + Kg, (S - 2S,),
K , KCJ - коэффициенты преобразования длительности и перемещения в напря-jQ женив на третьем участке аппроксимации. Длина третьего участка ограничеразностью величины предела измерения датчика перемещения и суммар
ной длины первых двух участков. Это обеспечивается блокировкой регистра 9 сдвига по Е-входу при переходе на третий (последний) участок, когда на третьем выходе регистра 9 сдвига устанавливается логическая 1. Таким образом, на выходе фильтра 18 нижних частот выраба тывается сигнал коррекгщи в виде положительного напряжения, пропорционального устранен- ному дисбалансу при кусочно-линейной аппроксимации, зависимости D (S) тремя участками. Сигнал коррекции подается на второй вход схемы 3 сравнения и при достижении им величины, равной значению измеренного дисбаланса, на выходе схемы 3 сравнения формируется логическая 1, которая возвращает RS-триггер 5 в исходное состояние. На выходе RS-триггера 5 устанавливается логический О, по которому привод 1 исполнительного механизма возвращает исполнительный механизм 2 в исходное положение. На этом процесс коррекции дисбаланса заканчивается.
Учет нелинейной зависимости устраненного дисбаланса от рабочего перемещения инструмента при коррекции дисбаланса повышает точность коррекции и производительность при задан- ном остаточном значении дисбаланса.
Ф ор мул а из о б рет е ни я
Устройство для коррекции .дисбаланса, содержащее привод исполнитель
5
jQ
15
20
30
, 50
0
него механизма, исполнительный механизм, связанный с ним датчик перемещения инструмента, схему сравнения, блок измерения, выход которого связан с первым входом схемы сравнения, КЗ-триггер, R-вход которого соединен с выходом схемы сравнения, а выход - с входом привода исполнительного механизма, соединенные последовательно первые аттенюатор и аналоговый ключ и блок управления, отличающееся тем, что, с целью повьш ения точности, оно снабжено преобразователем длительность - число импульсов, фор шрователем, регистром сдвига, D- и Е-входы которого соединены с его третьим выходом, С-вход - с выходом преобразователя длительность - число импульсов, вход-с выходом формирователя, а R- вход - с соединенными между собой входами формирователя и преобразователя длительность - число импульсов и выходом датчика перемещения инстру-, мента, последовательно соединенными вторыми аттенюатором и аналоговым ключом и третьими аттенюатором и аналоговым ключом, соединенным с входами аттенюаторов источником опорного сигнала, соединенным с выходами аналоговьсс ключей трехвходовым сумматором и связанным с его выходом первым фильтром нижних частот, выход которого соединен с вторым входом схемы сравнения, управляющие входы аналоговых ключей соединены с соответствующими первым и вторым выходами регистра сдвига, S-вход RS-триггера соединен с выходом блока управления, а датчик перемещения инструмента выполнен в виде трехфазного генератора и последовательно соединенных измерителя фазы, входы которого связаны с тремя вькодами трехфазного генератора, второго фильтра нижних частот, нуль-компаратора и фазоимпульсного детектора, второй вход которого соединен с трет;ьим , вькодом трехфазного генератора, а выход представляет собой выход датчика перемещения инструмента.
Q S; S ui) daz)
накс St (fuHOKcJ (tu)
t
Редактор Н.Марголина
Составитель Ю.Круглое
Техред Я.Попович Корректор Т.Колб
5112/39
Тираж 778Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий И3035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг.З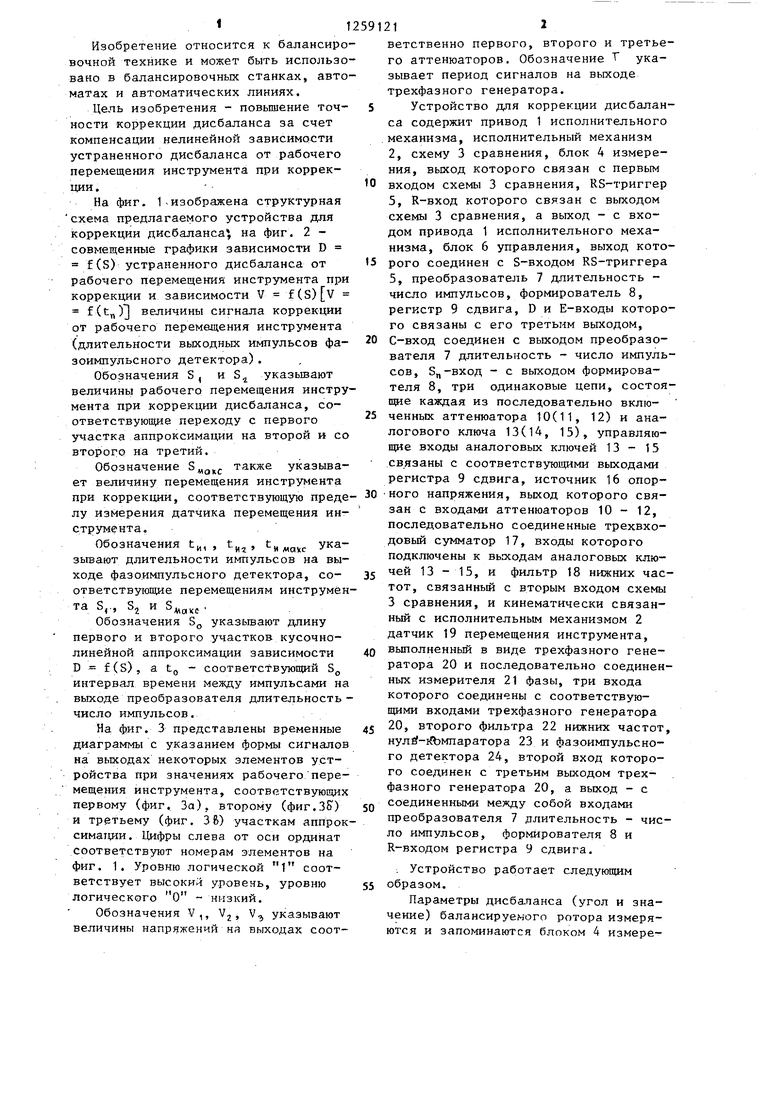
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| Устройство для коррекции дисбаланса | 1985 |
|
SU1305543A1 |
| Устройство для коррекции дисбаланса коленчатого вала | 1986 |
|
SU1406456A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1478331A1 |
| Устройство для коррекции дисбаланса коленчатого вала | 1983 |
|
SU1101701A1 |
| Позиционный электропривод | 1983 |
|
SU1124255A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1226086A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1320670A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1096511A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РЕЗОНАТОРА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА ЛУЧОМ ЛАЗЕРА | 1993 |
|
RU2079107C1 |
Изобретение относится к баланси- ровочной технике и может быть использовано в балансировочных станках, ав томатах и автоматических линиях. Целью изобретения является повышение точности коррекции дисбаланса, достигаемое при учете нелинейности зависимости устраненного дисбаланса от рабочего перемещения инструмента при коррекции. С выхода датчика перемещения инструмента, кинематически связанного с исполнительным механизмом, на входы регистра сдвига, формирователя и преобразователя длительность - число импульсов поступают импульсы, длительность которых пропорциональна перемещению инструмента. С помощью сумматора и системы аналоговых ключей, управляемых регистром сдвига, формируется кусочно-аппроксимированный сигнал коррекции, поступающий че- Ш рез фильтр нижних частот на первый вход схемы сравнения, на второй вход которой подается сигнал с блока измерения. 3 ил. с
| Устройство для коррекции дисбаланса ротора | 1976 |
|
SU599173A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
