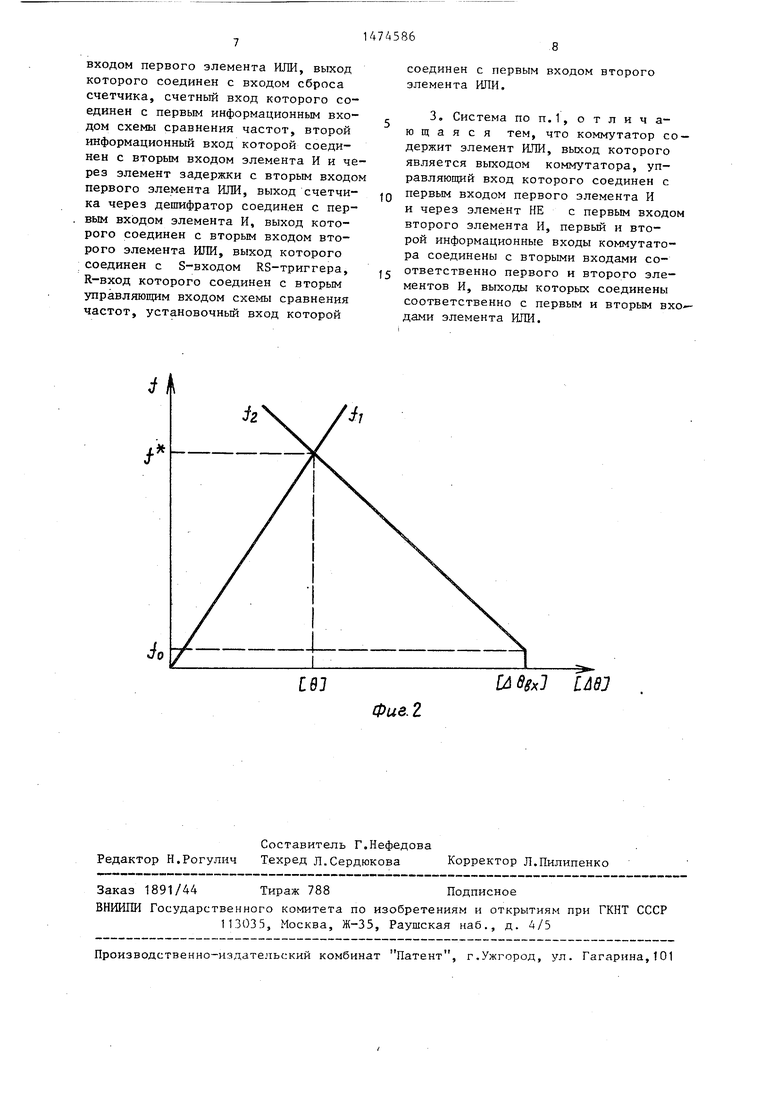
ются импульсы, которые установят нуж- 25 нения частот и коммутатор, выход коную разность на выходе второго вычитателя 6 для установки объекта 2 управления в заданное положение. Таким образом, отработка системой входного угла осуществляется в два этапа. На начальном участке про™ исходит разгон двигателя в соответствии с характеристикой второго преобразователя 12 код - частотао В момент равенства частот первого 11 и второго 12 преобразователей код - частота (фиг.2) система переключается на частоту первого преобразователя 11 код - частота и осуществляется торможение и стабилизация объекта 2 управления в заданном положении. В результате того, что разгон двигателя 1 на начальном этапе происходит за счет последовательного нарастания выходной частоты второго преобразователя 12 код - частота, характеристика вход - выход которого может быть выбрана в соответствии с заданными требованиями, повышается равномерность движения нагрузки и снижаются затраты энергии в ходе переходного процесса.
Формула изобретения
1. Следящая система, содержащая задатчик входного сигнала, выход которого соединен с первым входом первого вычитателя, выход модуля
0
5
0
5
0
5
торого соединен со счетным входом реверсивного счетчика, выход первого вычитателя соединен с информационным входом блока дешифрации, первый и второй выходы которого соединены с соответствующими управляющими входами схемы сравнения частот, первый и второй информационные входы которой соединены соответственно с выходами первого и второго преобразователей код - частота, выходы которых соединены соответственно с первым и вторым информационными входами коммутатора, управляющий вход которого соединен с выходом схемы сравнения частот, установочный вход которой соединен с выходом блока -установки начальных условий, и с входом установки начальных условий блока дешифрации, третий выход блока дешифрации соединен с входом записи регистра, информационный вход которого соединен с вторыми входами второго и третьего вычитателей, выход регистра соединен с первым входом третьего вычитателя, выход которого соединен с входом второго преобразователя код - частота.
2. Система поп.1, отличающаяся тем, что схема сравнения частот содержит RS-триггер, выход которого является выходом схемы сравнения частот, первый управляющий вход которой соединен с первым
входом первого элемента ИЛИ, выход которого соединен с входом сброса счетчика, счетный вход которого соединен с первым информационным входом схемы сравнения частот, второй информационный вход которой соединен с вторым входом элемента И и через элемент задержки с вторым входо первого элемента ИЛИ, выход счетчика через дешифратор соединен с первым входом элемента И, выход которого соединен с вторым входом второго элемента ИЛИ, выход которого соединен с S-входом КЗ-триггера, R-вход которого соединен с вторым управляющим входом схемы сравнения частот, установочный вход которой
соединен с первым входом второго элемента ИЛИ.
3. Система по п.1, о т л и ч а- ю щ а я с я тем, что коммутатор содержит элемент ИЛИ, выход которого является выходом коммутатора, управляющий вход которого соединен с
первым входом первого элемента И
и через элемент НЕ с первым входом второго элемента И, первый и второй информационные входы коммутатора соединены с вторыми входами соответственно первого и второго элементов И, выходы которых соединены соответственно с первым и вторым дами элемента ИЛИ.

| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
| Цифровой Фурье-преобразователь | 1982 |
|
SU1043663A1 |
| Устройство для контроля логических схем | 1986 |
|
SU1381517A1 |
| Устройство для контроля температуры | 1988 |
|
SU1515176A1 |
| Устройство для цифрового преобразования координат | 1982 |
|
SU1019445A1 |
| Цифровое устройство для преобразования координат | 1981 |
|
SU960808A1 |
| Устройство для ввода информации | 1979 |
|
SU855649A1 |
| Устройство для регистрации рабочих параметров транспортного средства | 1987 |
|
SU1481821A1 |
| СИСТЕМА ДЛЯ ШИФРАЦИИ И ДЕШИФРАЦИИ КОМАНД | 1991 |
|
RU2043699C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
Изобретение относится к автоматическому управлению электроприводами и может быть использовано для автоматизации промышленных объектов, требующих повышенной плавности перемещения. Целью изобретения является повышение помехозащищенности системы и снижение энергозатрат. Следящая система содержит двигатель 1,объект 2 управления, преобразователь 3 положение - код, первый вычитатель 4, задатчик 5 входного сигнала, второй 6 вычитатель, цифроаналоговый 7 преобразователь, реверсивный 8 счетчик, блок 9 установки начальных условий, коммутатор 10, первый 11 и второй 12 преобразователи код - частота, схему 13 сравнения частот, первый элемент ИЛИ 14 блока 30 дешифрации, первый дешифратор 15 блока 30 дешифрации, регистр 16, третий вычитатель 17, второй дешифратор 18 блока 30 дешифрации. Схема 13 сравнения частот содержит счетчик 19, дешифратор 20, RS=триггер 21, первый 22 и второй 23 элементы ИЛИ, элемент И и элемент 25 задержки. Коммутатор 10 содержит первый 26 и второй 27 элементы И, элемент ИЛИ 28 и элемент НЕ 29, и блок 30 дешифрации. Введение в сигнал ошибки линейного элемента увеличивает равномерность отработки. 2 ил. 2 з.п. ф - лы.
ш
& Sgx Ш}
Фие.2
| Устройство для стабилизации соот-НОшЕНий ВыХОдНыХ ВЕличиН дВуХдВигАТЕль-НыХ элЕКТРОпРиВОдОВ | 1979 |
|
SU830290A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящая система | 1984 |
|
SU1265692A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
