13056
pa 9. В первой ячейке установлен элемент ИЛИ 12, один вход 13 которого соединен с 7саналом 14 пуска, другой вход 15- - с выходом 6 первого распределителя 2, вьпсод 16 - с прямой камерой управления 7 второго распределителя 3. Во всех ячейках, кроме первой, прямая камера управления 7 второго распределителя 3 связана с выходом 6 первого распределителя 2. Б каждой ячейке нормально закрытый 4 и нормаль но открытьй 5 входы второго распреде- ,лителя 3 подключены соответственно к каналу питания и к атмосфере. Выход
1
Изобретение относится к пневмоавтоматике, а именно к командоаппаратам предназначенным для построения логи-i ческих систем управления..
Цель изобретения - уменьшение ап- паратурных затрат.
На чертеже приведена схема коман- доаппарата.
Командоаппарат содержит ячейки 1, в каждой из которых-установлены пер вый 2 и второй 3 распределители. Каждый распределитель имеет нормально закрытьш 4 и нормально открытый 5 входы, выход 6, прямую камеру 7 управления и инверсную камеру 8- управления с подпора 9.
Входы 4 распределителей 3 соединены с каналом питания, входы 5 этих распределителей - с атмосферой, а выходы - с выходными каналами 10,
Прямые камеры 7 управления распределителей 2 соединены с входными каналами 11.
В первой ячейке установлен элемент ИЛИ 12, вход 13 которого соед:инен с каналом 14 пуска, вход 15 - с выходом распределителя 2, а выход 16 - с прямой камерой 7 управления распределителя 3„ Выход 6 каждого распределителя 3 соединен с нормально открытым входом 5, с инверсной камерой 8 управления распределителя 2 своейэ ячейки, с нормально закрытым входом 4 распределителя 2 следующей ячейки и с инверсной камерой 8 управления распреде лителя 3 предыдущей ячейки.
6 второго распределителя 3 сообщен с соответствующим выходным каналом 10, а прямая камера управления 7 первого распределителя 2 соединена с соответствующим входным каналом 11. В каждой ячейке выход 6 второго распределителя 3 соединен с нормально открытым входом 5 и инверсной камерой управления 8 первого распределителя
2своей ячейки, с нормально закрытым входом 4 первого распределителя 2 следующей ячейки и инверсной камерой управления 8 второго распределителя
3предьщущей ячейки. 1 ил.
Во всех случаях, кроме первой, выход 6 распределителя 2 соединен с прямой камерой 7 управления распределителя 3.
Командоаппарат работает-следующим образом.
В исходном положении сигналы на входах 11 (Х,Х2,...,Х) и на выходах 10 (У:, ,У 5.. . ,У) равны 0. При подаче сигнала Пуск (Р 1) на вход 13 элемента ИЛИ 12 переключается распределитель 3 первой ячейки 1. При этом давление питания поступает на выход 10 первой ячейки (). На остальных . выходах командоаппарата сигналы равны О (У ,У ,. . . ,). Сигнал, равный 1, поступает также в камеры 8 управления распределителя 2 своей первой ячейки и распределителя 3 последней ячейки, фиксируя их исходное состояние, на вход 4 распределителя 2 последующей .второй ячейки и на вход 5 распределителя 2 первой ячейки. Через.вход 5 и выход 6 распределителя 2 сигнал 1 проходит на вход 15 и далее через выход 16 элемента ИЛИ Ш1И 12 - в камеру 7 управления распределителя 3, Этим обеспечивается запоминание выходного сигнала У 1 после снятия сигнала Пуск Р.
При подаче сигнала, равного 1, на вход 11 (Xj,) распределитель 2 второй ячейки переключается и через его вход 4 сигнал, равньй 1, поступает на выход 6 распределителя 2 второй ячейки, далее - в камеру 7 управления распределителя 3 этой же ячейк переключая распределитель 3, Давлени питания через вход 4 распределителя второй ячейки поступает на выход 10 (у2) второй ячейки командоаппарата () и в камеры 8 управления распределителя 2 второй ячейки и распределителя 3 первой ячейки, переключая их. После переключения распределителя 2 второй ячейки в исходное положе ние сигнал, равный 1, проходит через вход 5 и выход 6 этого распределителя в камеру 7 управления распределителя 2 этой же ячейки. При этом происходит запоминание сигнала, рав- ного 1., на выходе 10 (). Одновременно распределитель 3 первой ячейки возвращается в исходное положение под действием пружины подпора 9 и сигнала , поступающего в ин- версную камеру 8 управления распределителя 3 первой ячейки. При этом на выходе 10 (У), как и на других выходах 10 (У, У4..., УП) сигналы равны 0. Далее подача сигнала Х приводит к появлению сигнала, равного 1, на выходе 10 (У,) последней ячейки, на остальных выходах сигналы равны О, работа командоаппарата здесь происходит аналогично работе рассмот- ренных ячеек. Цикл работы командоаппарата возобновляется при подаче сигнала X 1 в камеру 7 управления распределителя 2 первой ячейки.
В случае снятия давления питания, в том числе, в аварийном случае, ко- мандоаппарат устанавливается в исходное состояние за счет рпимененя распределителей с пружинами полно ра.
Составитель Н. Ланин Редактор Н. Рогулич Техред И.Попович Корректор С. Черни
Заказ 1451/45Тираж 673 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. Д/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Формула изобретения
Пнеяматический командоаппарат, содержащий ячейки, в каждой из которых установлены первый и второй распределители, выполненные с нормально закртым и нормально открытым входами, выходом и с прямой и инверсной камерами управления, причем в инверсной камере управления первого распределителя установлена пружина подпора, а в первой ячейке установлен элемент ИЛИ один вход которого соединен с каналом пуска, другой вход - с выходом первого распределителя, выход - с прямой камерой управления второго распределителя, во всех ячейках, кроме первой, прямая камера управления второго распределителя связана с выходом первого распределителя, в каждой ячейке нормально закрытый и нормально открытый .входы второго распределителя подключены соответственно к каналу питания и в атмосфере, выход второго распределителя сообщен с соответствующим выходным каналом, а прямая камера управления первого распределителя соединена с соответствующим входным каналом, отличающийся тем, что, с целью уменьшения аппаратурных затрат, в инверсных камерах управления вторых распределителей установлены пружины подпора, а в каждой ячейке выход второго распределителя соединен с нормально открытым входом и инверсной камерой управления первого распределителя своей ячейки, с нормально закрытым входом первого распределителя следующей ячейки и с инверсной камерой управления второго распределителя предьщущей ячейки.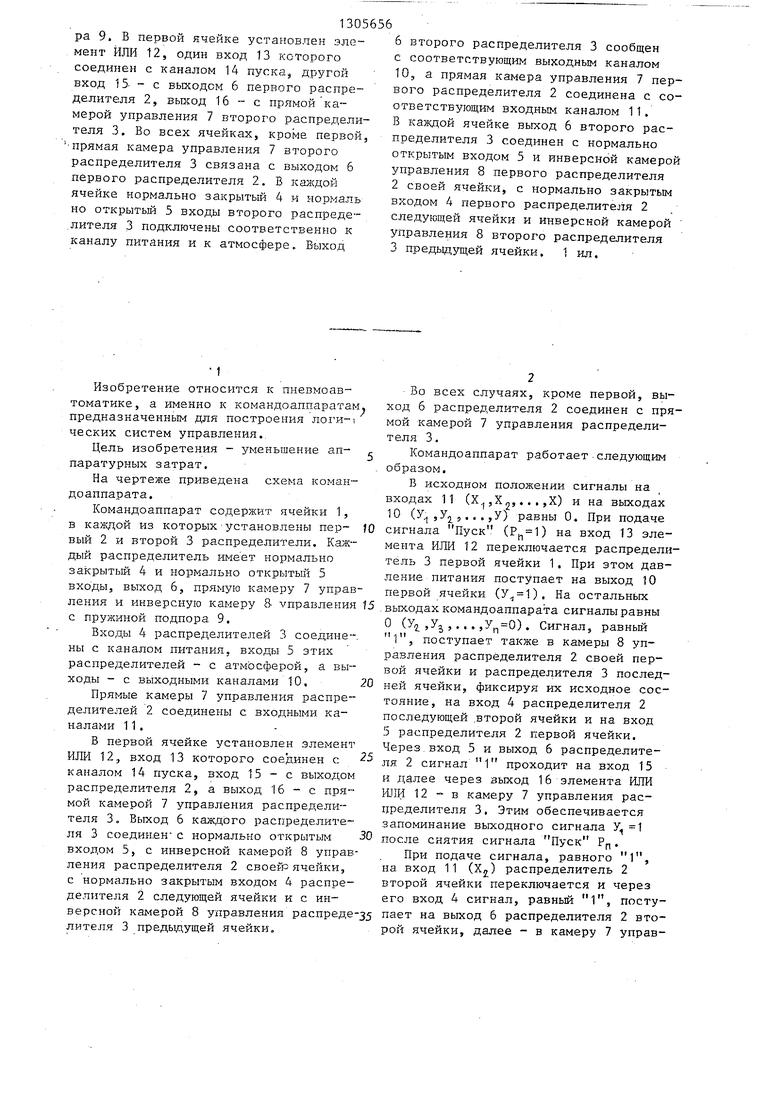
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический командоаппарат | 1984 |
|
SU1242926A1 |
| Устройство для умножения на коэффициенты | 1985 |
|
SU1305663A1 |
| Пневматический командоаппарат | 1984 |
|
SU1241217A1 |
| Пневматическое обегающее устройство | 1982 |
|
SU1012227A1 |
| Многофункциональный пневматический логический модуль | 1982 |
|
SU1020811A1 |
| Пневматический командоаппарат | 1980 |
|
SU920687A1 |
| Многофункциональный пневматический логический модуль | 1983 |
|
SU1140109A1 |
| Пневматическое логическое устройство | 1983 |
|
SU1142816A1 |
| Многофункциональный пневматический логический модуль | 1984 |
|
SU1200124A2 |
| Пневматический импульсатор | 1982 |
|
SU1049887A1 |
Изобретение относится к пневмоавтоматике, а именно к командоаппара- там, предназначенным для построения логических систем управления. Цель изобретения - уменьшение аппаратурных затрат. Пневматический командо- аппарат содержит ячейки 1, в каждой из которых установлены первый 2 и второй 3 распределители, выполненные с нормально закрытым 4 и нормально открытым 5 входами, выходом 6 и прямой 7 и инверсной 8 камерами управления, причем в инверсных камерах управления установлены пружины подпо15ггДп Рп S
| Системы пневмоавтоматики в станкостроении | |||
| -М | |||
| : ИМАШ, 1977, с.51, рис.57 | |||
| Пневматический командоаппарат | 1984 |
|
SU1242926A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
