кулярных плоскостях. Она достигается тем, что в устройстве имеется механизм (М) поворота штанги 12 вокруг оси с полым цилиндром 14 и М наклона герметичного стакана 4 в двух взаимно перпендикулярных плоскостях, а М
1305902
подъема и опускания штанги 12 имеет две пары блоков и противовес 26 и направляющие. В описании изобретения дано взаимное расположение конструктивных элементов устройства. 1 з.п, ф-лы, 13 ил.
1
Изобретение относится к испытаниям материалов и может быть использовано в качестве устройства для пространственной ориентации образцов в вакуумной камере при испытаниях.
Цель изобретения - расширение функциональных возможностей путем обеспечения поворота плош;адки в трех взаимно перпендикулярных плоскостях.
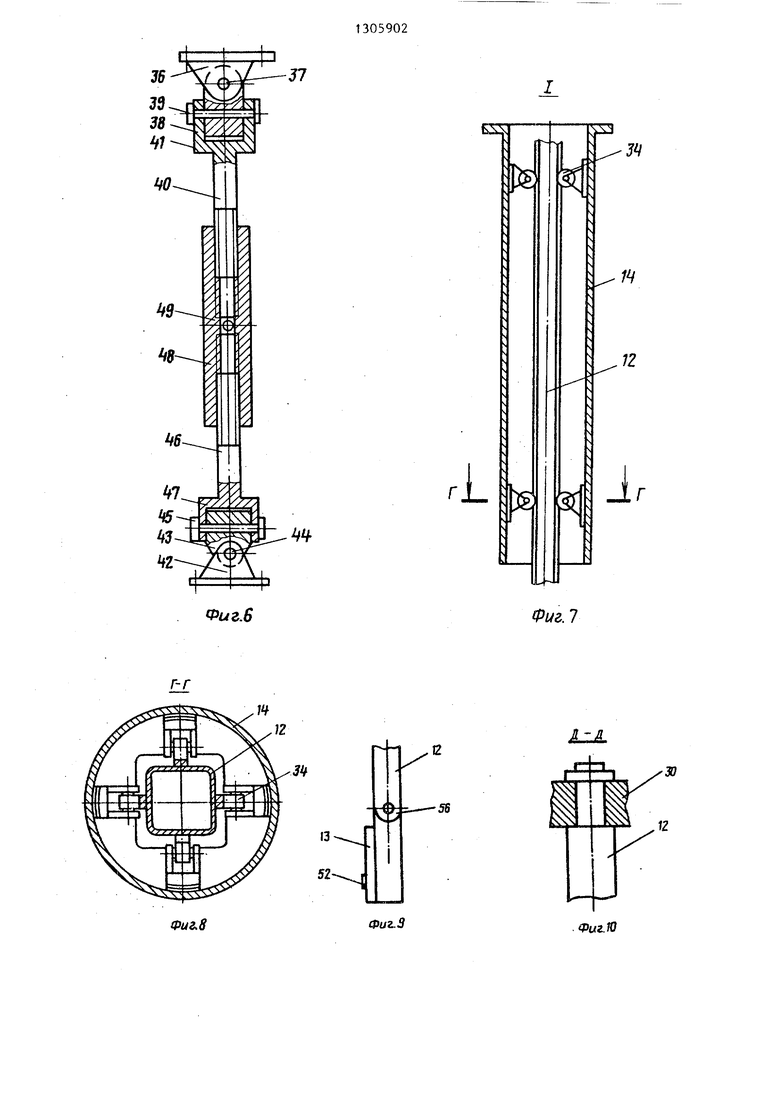
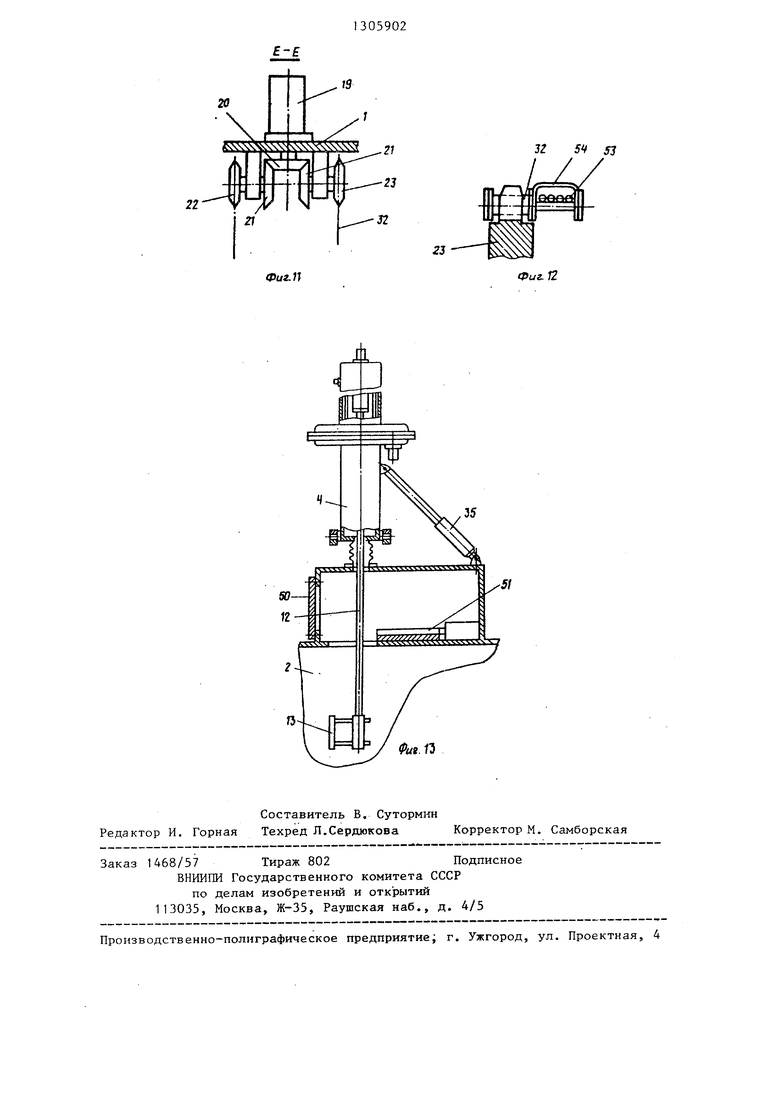
На фиг. 1 показано предлагаемое устройство, общий вид; на фиг. 2 - штанга и схема соединения цепями и гибкими нитями штанги с противовесом; на фиг. 3 - разрез А-А на фиг.1 на фиг. 4 - вид Б на фиг. 1; на фиг. 5 - разрез В-В на фиг. 4; на фиг.6 - конструкция стержня регулируемой длины, пример конструкции; на фиг. 7 - узел I на-фиг. 1; на фиг. 8 - разрез Г-Г на фиг. 7; на фиг. 9 - шарнирная подвеска плош;ад- ки Д.ПЯ образцов, вариант; на фиг. 10 разрез Д-Д на фиг. 1; на фиг. 11 - разрез Е-Е на фиг. 1; на фиг. 12 - крепление проводов к цепи; нафиг.13 положение штанги в вакуумной камере.
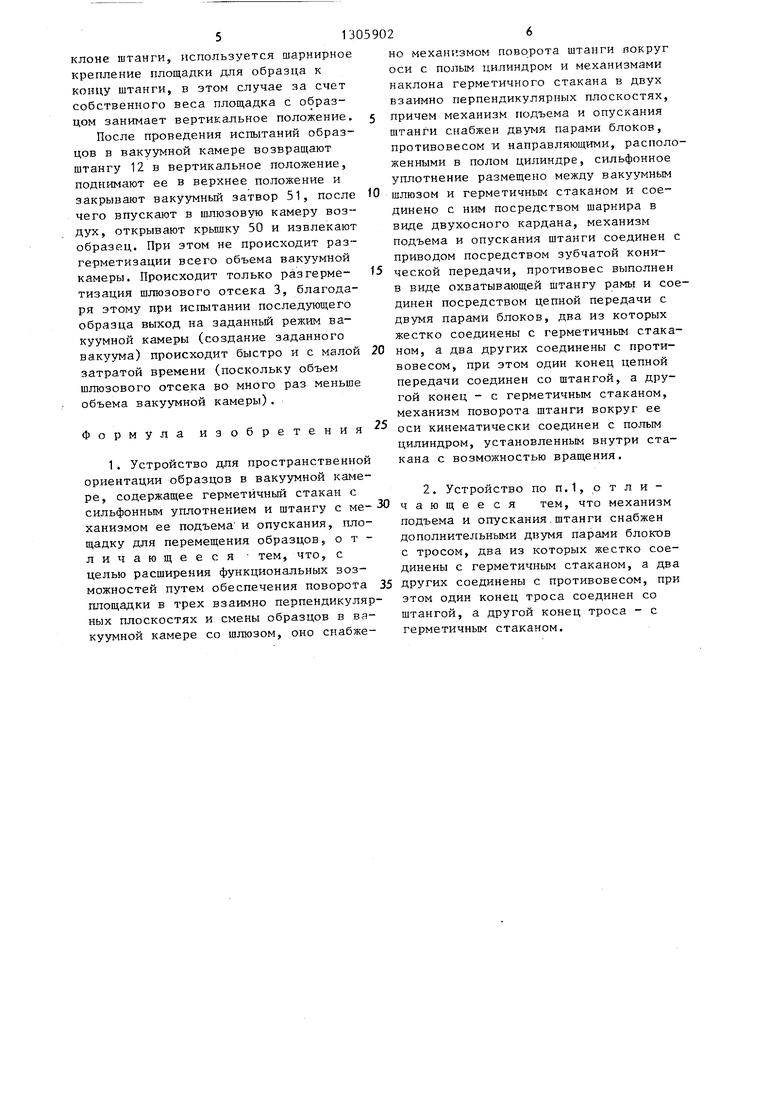
Устройство содержит корпус 1, установленный сверху вакуумной камеры 2 на шлюзовом отсеке 3 (шлюзе). Корпус 1 выполнен в виде герметичного вертикального стакана 4 и соединен с верхней стенкой шлюза силь- фоном 5 и опорным шарниром 6, выполненным в виде двухосного кардана, состоящего из двух стоек 7, закрепленных на шлюзе 3, кольца 8, состоящего из двух половинок 9, жестко содиненных между собой, двух цапф 10, закрепленных на кольце 8 и шарнирно соединенных со стойками 7, а также двух цапф 11, закрепленных на стакане 4 и шарнирно соединенных с кольцом 8.
5
0
5
0
5
0
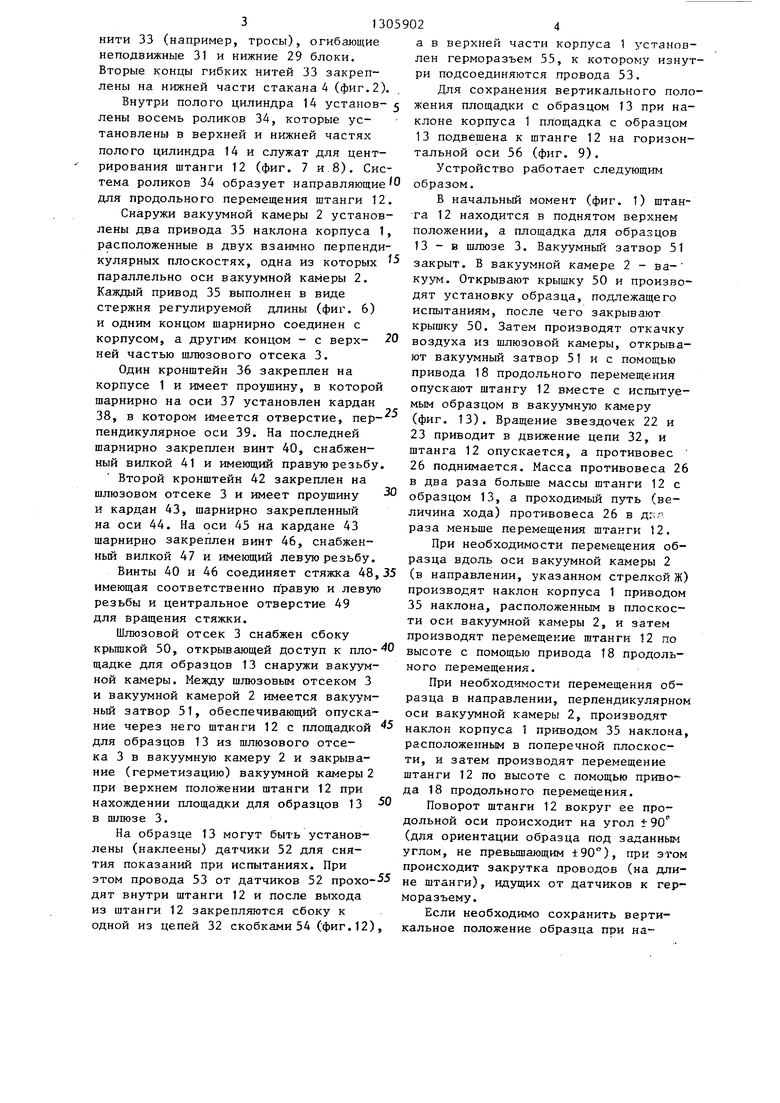
Внутри стакана 4 размещена штанга 12 с площадкой для образцов 13. Штанга 12 выполнена в виде квадратной трубы, установленной внутри полого цилиндра 14, установленного с возможностью вращения внутри стакана 4. На полом цилиндре 14 жестко закреплено зубчатое колесо 15, находящееся в зацеплении с шестерней 16, кинематически связанной с электродвигателем 17 (например, с помощью волновой зубчатой передачи), размещенной снаружи корпуса 1.
Штанга 12 снабжена приводом 18 продольного перемещения, вьшолненным в виде двигателя 19, установленного снаружи на верхнем торце корпуса 1 и кинематически соединенного (например, через волновую зубчатую передачу) через конические зубчатые шестерни 20 и 21 с двумя ведущими звездочками 22 и 23, закрепленными на верхнем торце корпуса 1 внутри него.
Внутри верхней части корпуса 1 установлены вертикальные направляющие 24, в которых на роликах 25 установлен противовес 26, выполненный в виде прямоугольной рамы 27, охватывающей штангу 12 и снабженной двумя верхними 28 и двумя нижними 29 блоками.
На верхнем конце штанги 12 установлена охватывающая ее траверса 30. Штанга 12 может поворачиваться вокруг продольной оси внутри траверсы 30.
Внутри корпуса 1 установлены два неподвижных блока 31.
На траверсе 30 сверху закреплены одними концами две цепи 32, охватывающие ведущие звездочки 22 и 53 и верхние блоки 28. Вторые концы цепей 32 закреплены на верхней части корпуса 1 (фиг. 2).
С нижней стороны траверсы 30 одними концами закреплены две гибкие
нити 33 (например, тросы), огибающие неподвижные 31 и нижние 29 блоки. Вторые концы гибких нитей 33 закреплены на нижней части стакана 4 (фиг.2),
Внутри полого цилиндра 14 установ- 5 лены восемь роликов 34, которые установлены в верхней и нижней частях полого цилиндра 14 и служат для центрирования штанги 12 (фиг. 7 и.8). Система роликов 34 образует направляющие О для продольного перемещения штанги 12.
Снаружи вакуумной камеры 2 установлены два привода 35 наклона корпуса 1, расположенные в двух взаимно перпендиf5
кулярных плоскостях, одна из которых параллельно оси вакуумной камеры 2. Каждый привод 35 выполнен в виде стержня регулируемой длины (фиг. 6) и одним концом шарнирно соединен с
корпусом, а другим концом - с верх- ней частью шлюзового отсека 3.
Один кронштейн 36 закреплен на корпусе 1 и имеет проушину, в которой шарнирно на оси 37 установлен кардан 38, в котором имеется отверстие, перпендикулярное оси 39. На последней шарнирно закреплен винт 40, снабженный вилкой 41 и имеющий правую резьбу
Второй кронштейн 42 закреплен на шлюзовом отсеке 3 и имеет проушину и кардан 43, шарнирно закрепленный на оси 44. На оси 45 на кардане 43 шарнирно закреплен винт 46, снабженный вилкой 47 и имеющий левую резьбу.
Бинты 40 и 46 соединяет стяжка 48 имеющая соответственно правую и левую резьбы и центральное отверстие 49 для вращения стяжки.
Шлюзовой отсек 3 снабжен сбоку крьшкой 50, открывающей доступ к ппощадке для образцов 13 снаружи вакуумной камеры. Между шлюзовым отсеком 3 и вакуумной камерой 2 имеется вакуумный затвор 51, обеспечивающий опускание через него штанги 12 с площадкой для образцов 13 из шлюзового отсека 3 в вакуумную камеру 2 и закрывание (герметизацию) вакуумной камеры 2 при верхнем положении штанги 12 при нахождении площадки для образцов 13 в шлюзе 3.
На образце 13 могут быть установлены (наклеены) датчики 52 для снятия показаний при испытаниях. При этом провода 53 от датчиков 52 проходят внутри штанги 12 и после выхода из штанги 12 закрепляются сбоку к одной из цепей 32 скобками 54 (фиг.12)
5 О
5
0
5
а в верхнер части корпуса 1 установлен герморазъем 55, к которому изнутри подсоединяются провода 53.
Для сохранения вертикального положения площадки с образцом 13 при наклоне корпуса 1 площадка с образцом 13 подвешена к штанге 12 на горизонтальной оси 56 (фиг. 9).
Устройство работает следующим образом.
В начальный момент (фиг. 1) штанга 12 находится в поднятом верхнем положении, а площадка для образцов 13 - в шлюзе 3. Вакуумньш затвор 51 закрыт. В вакуумной камере 2 - ва- куум. Открывают крышку 50 и производят установку образца, подлежащего испытаниям, после чего закрывают крышку 50. Затем производят откачку воздуха из шлюзовой камеры, открывают вакуумный затвор 51 и с помощью привода 18 продольного перемещения опускают штангу 12 вместе с испытуемым образцом в вакуумную камеру (фиг. 13). Вращение звездочек 22 и 23 приводит в движение цепи 32, и штанга 12 опускается, а противовес 26 поднимается. Масса противовеса 26 в два раза больше массы штанги 12 с образцом 13, а проходимый путь (величина хода) противовеса 26 в д:;.- раза меньше перемещения штанги 12.
При необходимости перемещения образца вдоль оси вакуумной камеры 2 (в направлении, указанном стрелкой Ж) производят наклон корпуса 1 приводом 35 наклона, расположенным в плоскости оси вакуумной камеры 2, и затем производят перемещение штанги 12 по высоте с помощью привода 18 продольного перемещения.
При необходимости перемещения образца в направлении, перпендикулярном оси вакуумной камеры 2, производят наклон корпуса 1 приводом 35 наклона, расположенным в поперечной плоскости, и затем производят перемещение штанги 12 по высоте с помощью привода 18 продольного перемещения.
Поворот штанги 12 вокруг ее продольной оси происходит на угол 1- 90° (для ориентации образца под зaдaнны углом, не превьшгающим ±90°), при этом происходит закрутка проводов (на д.пи- не штанги), идущих от датчиков к гер- моразъему.
Если необходимо сохранить вертикальное положение образца при наклоне штанги, используется шарнирное крепление площадки для образца к концу штанги, в этом случае за счет собственного веса площадка с образцом занимает вертикальное положение. После проведения испытаний образцов в вакуумной камере возвращают штангу 12 в вертикальное положение, поднимают ее в верхнее положение и закрывают вакуумный затвор 51, после чего впускают в шлюзовую камеру воздух, открывают крьшжу 50 и извлекают образец. При этом не происходит разгерметизации всего объема вакуумной камеры. Происходит только разгерметизация шлюзового отсека 3, благодаря этому при испытании последующего образца выход на заданный режим вакуумной камеры (создание заданного вакуума) происходит быстро и с малой затратой времени (поскольку объем шлюзового отсека во много раз меньше объема вакуумной камеры),
Формула изобретения
1. Устройство для пространственной ориентации образцов в вакуумной камере, содержащее герметичный стакан с
10
15
20
25
но механи.змом поворота штанги яокруг оси с полым цилиндром и механизмами наклона герметичного стакана в двух взаимно перпендикулярных плоскостях, причем механизм подъема и опускания штанги снабжен двумя парами блоков, противовесом и направляющими, располо женными в полом цилиндре, сильфонное уплотнение размещено между вакуумным шлюзом и герметичным стаканом и соединено с ним посредством шарнира в виде двухосного кардана, механизм подъема и опускания штанги соединен с приводом посредством зубчатой конической передачи, противовес выполнен в виде охватывающей штангу рамы и сое динен посредством цепной передачи с двумя парами блоков, два из которых жестко соединены с герметичным стаканом, а два других соединены с противовесом, при этом один конец цепной передачи соединен со штангой, а другой конец - с герметичным стаканом, механизм поворота штанги вокруг ее оси кинематически соединен с полым цилиндром, установленным внутри стакана с возможностью вращения.
2. Устройство по п.1, о т л и сильфонным уплотнением и штангу с не- чающееся тем, что механизм ханизмом ее подъема и опускания, пло- подъема и опускания.штанги снабжен щадку для перемещения образцов, о т - дополнительными двумя парами блоков личающееся тем, что, с целью расширения функциональных возможностей путем обеспечения поворота 35 других соединены с противовесом, при площадки в трех взаимно перпендикуляр- этом один конец троса соединен со
с тросом, два из которых жестко соединены с герметичным стаканом, а два
ных плоскостях и смены образцов в вакуумной камере со шлюзом, оно снабже
5
0
5
но механи.змом поворота штанги яокруг оси с полым цилиндром и механизмами наклона герметичного стакана в двух взаимно перпендикулярных плоскостях, причем механизм подъема и опускания штанги снабжен двумя парами блоков, противовесом и направляющими, расположенными в полом цилиндре, сильфонное уплотнение размещено между вакуумным шлюзом и герметичным стаканом и соединено с ним посредством шарнира в виде двухосного кардана, механизм подъема и опускания штанги соединен с приводом посредством зубчатой конической передачи, противовес выполнен в виде охватывающей штангу рамы и соединен посредством цепной передачи с двумя парами блоков, два из которых жестко соединены с герметичным стаканом, а два других соединены с противовесом, при этом один конец цепной передачи соединен со штангой, а другой конец - с герметичным стаканом, механизм поворота штанги вокруг ее оси кинематически соединен с полым цилиндром, установленным внутри стакана с возможностью вращения.
2. Устройство по п.1, о т л и чающееся тем, что механизм подъема и опускания.штанги снабжен дополнительными двумя парами блоков других соединены с противовесом, при этом один конец троса соединен со
с тросом, два из которых жестко соединены с герметичным стаканом, а два
штангой, а другой конец троса - с герметичным стаканом.
23
л 3
П
А-А
2
Фик.2
Фиг.З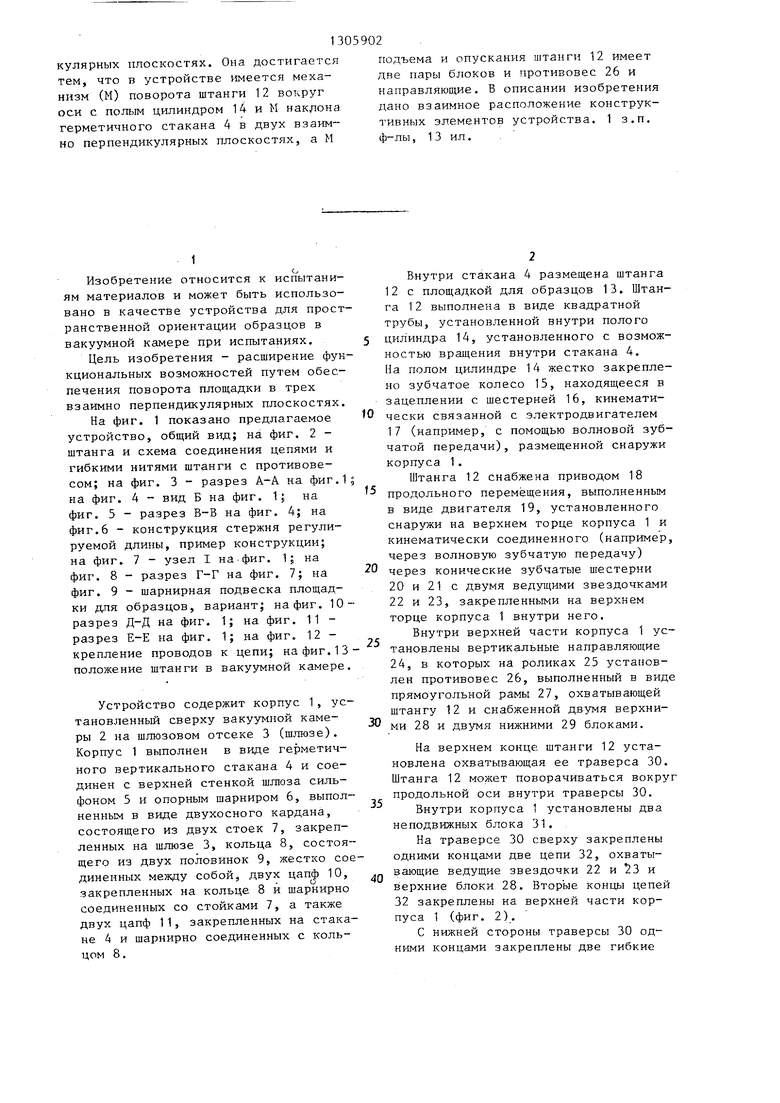
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортный комплекс Кашеварова Ю.Б. для транспортировки груза через плотину | 1990 |
|
SU1754603A1 |
| САМОХОДНОЕ ПОДВОДНОЕ КАФЕ | 2007 |
|
RU2348565C1 |
| МОБИЛЬНЫЙ ПОДВОДНЫЙ ЖИЛОЙ ДОМ | 2009 |
|
RU2399550C1 |
| Модуль опрыскивателя штанговый гидрофицированный | 2021 |
|
RU2808725C2 |
| СПОСОБ КОНТРОЛЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ДЫМОВОЙ ТРУБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2545062C1 |
| МОБИЛЬНЫЙ КОМПЬЮТЕРНЫЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ОПЕРАТИВНЫХ СОТРУДНИКОВ МЧС | 2006 |
|
RU2316824C2 |
| Манипулятор к доильным аппаратам | 1982 |
|
SU1113055A1 |
| Агрегат для обезжиривания изделий в контейнерах летучими растворителями | 1976 |
|
SU691504A1 |
| Устройство для отделения от стопы листовых заготовок и подачи их в зону обработки | 1983 |
|
SU1087232A1 |
| Манипулятор, работающий в герметизированном объеме | 1990 |
|
SU1785897A1 |
Изобретение относится к испытаниям материалов в вакууме. Цель - расширение функциональных возможностей устройства для пространственной ориентации образцов в вакуумной камере путам обеспечения поворота площадки для образцов в трех взаимно перпенди(Л оо о СП со о ьо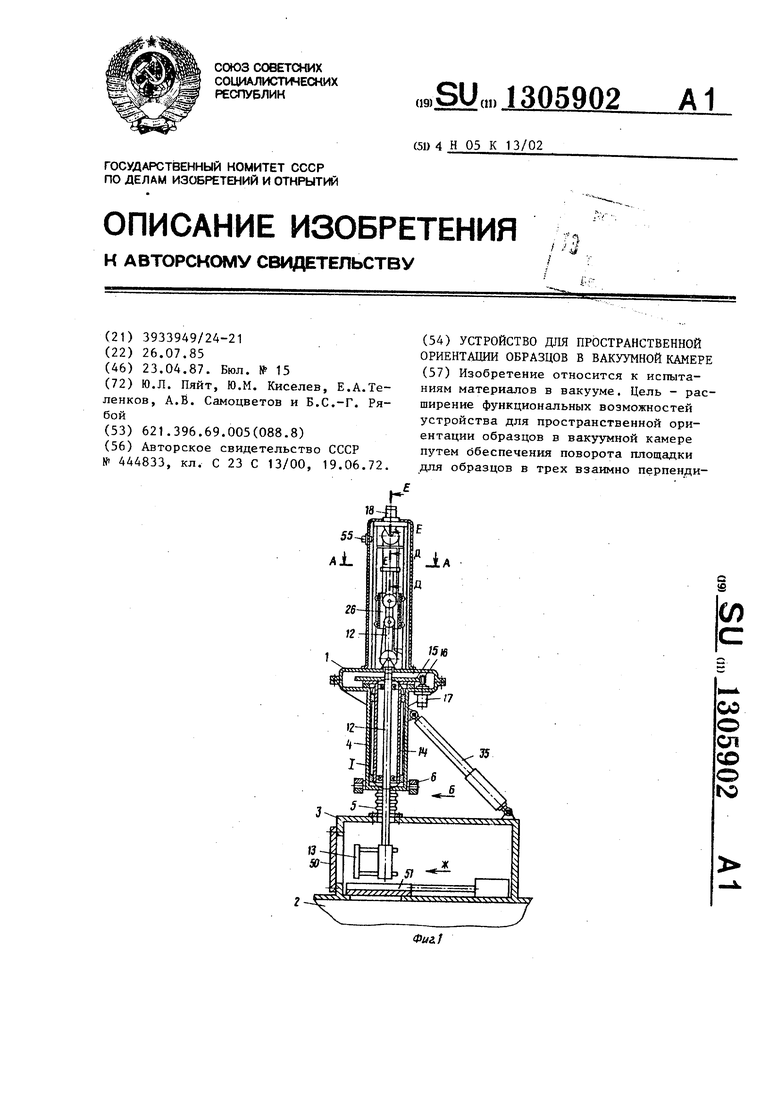
8и9В
.1
Л
э
СI-,
ФигЛ
Фиг. 5
NbC
KSS
Р V 3
3 8
5
12
6
г
L
Г
Фиг.6
Фиг. 7
Щ
П
гз
52
с
LLA,
56
Фиг,8
Фиг. 5
Фиг.Ю
J2 5f 57
Фиг.П
Фиг. 12
П
35
HP/ (fut.l i
Составитель В. Сутормин Редактор И. Горная Техред Л.Сердюкова Корректор М. Самборская
Заказ 1468/57 Тираж 802Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие; г. Ужгород, ул. Проектная, 4
| Устройство для нанесения покрытий в вакууме | 1971 |
|
SU444833A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
