1, жестко соединенный с рычагом 4 с отогнутыми дод прямым углом к оси вала концами 5, которые входят в проушины 6, выполненные в виде кольца ступицы, образуя шарнирное соединение рычага 4 со ступицей. Регулятор направления упора выполнен в виде универсального шарнира, содержащего шаровую опору 13, охватывающий последнюю обвод 10, на котором по периметру
1
Изобретение относится к экспериментальной гидродинамике, в частности к моделям для испытания двухлопастных движителей.
Цель изобретения - повышение маневренности транспортного средства путем регулирования его дифферента или тангажа.
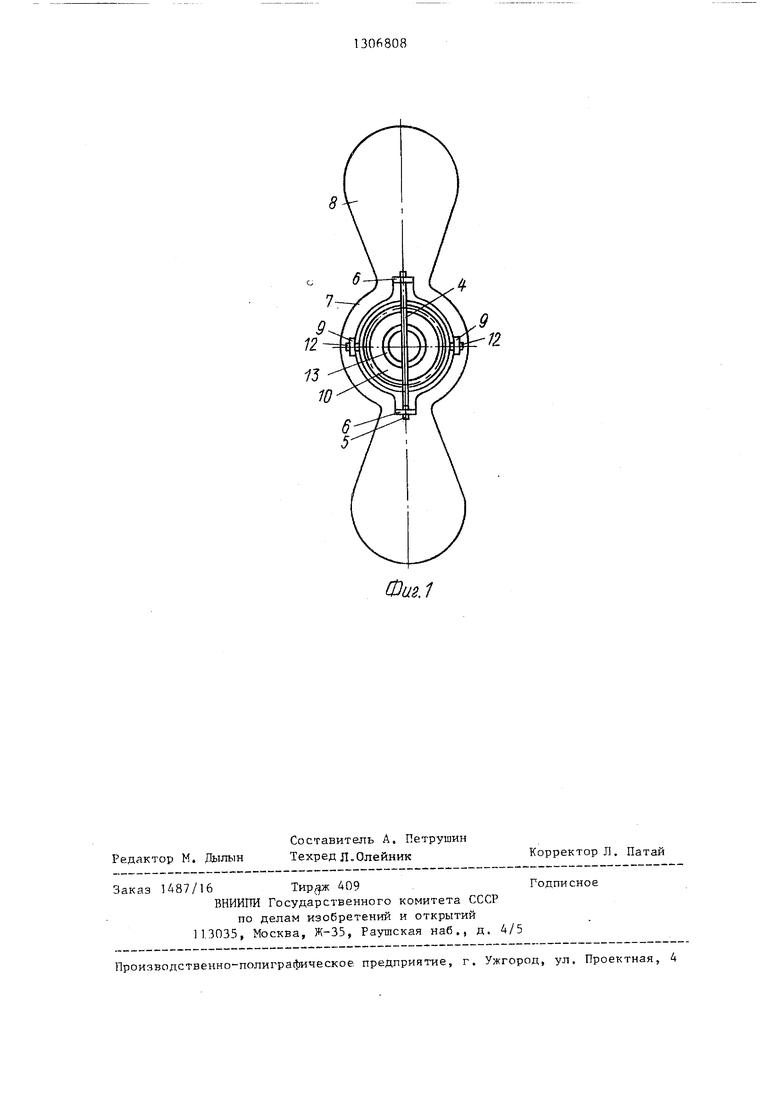
На фиг. 1 изображен двухлопастный движитель, вид спереди; на фиг, 2 - то же, вид сбоку.
Двухлопастный движитель содер сит вал 1 с резиномотором 2, установленный Б корпусе 3 и жестко соединенный с рычагом 4 с отогнутыми под прямым углом к оси вала концами 5, которые входят в проушины 6, выполненные в виде кольца ступицы 7, образуя шарнирное соединение рычага 4 со ступицей 7 .
На ступице 7 жестко установлены под заданным углом друг к другу вдоль шарнирного соединения рычага 4 со ступицей 7 лопасти 8 и проушины 9,
На ободе 10 установлен подшипник 11, наружная обойма которого имеет два пальца 12, которые входят в проушины 9 ступицы 7, образуя шарнирное соединение последней с ободом 10.
Закрутив резиномотор 2, когда обод занимает положение А (плоскость вращения обоймы подшипника 11 перпендикулярна оси вращения вала 1), запускают модель в среду, например в
При вращении вала 1 вращаются связанные с ним лопасти 8, вращается и обойма подшипника 1I, которую увлекают за собой проушины 9 ступицы 7. Так как плоскость вращения обоймы подшипника 11 перпендикулярна оси вращения
еу
ЗП6808
жестко установлен подшипник 1, наружная обойма которого имеет два пальца 12, которые в свою очередь входят в проушины 9, образуя шарнирное соединение последней с ободом 10. Для создания упора в плоскости вращения лопастей необходимо наклонить обод 10 на опоре 13 на некоторьй угол относительно оси вращения вала 1, например, в положеже Ь. 1 з.п. ф-лы, 2 ил.
5
0
5
0
5
0
вала 15 то и плоскость ступицы будет перпендикулярна оси вращения вала, следовательно, будут равны углы атаки двух лопастей 8, равны первоначально заданным. В этом случае движитель создает только осевой упор.
При закрутке резиномотора в другую сторону, лопасти движителя при вращении создают осевой упор в другую сторону, аналогично указанному. Модель будет двигаться вперед или назад.
Для создания упора в плоскости вращения лопастей необходимо отклонить обод 10 на некоторый угол относительно оси вращения вала 1, для чего вручную поворачивают обод 10 на требуемьй угол на шаровой опоре 13, например в положение Б. Силы трения удерживают заданное положение обода 10,
При вращении двилштеля в каком-либо направлении проушины 9 ступицы 7 увлекают за собой пальцы 12 обоймы подшипника 11, плоскость вращения которого находится 73 данном случае под углом к оси вращения вала, в результате чего ступица 7 поворачивается вокруг своей продольной оси в проушинах 6, что приводит к изменению положения лопастей 8 относительно плоскости вращения вала 1. На фиг. 1 и 2 изображен момент в двух проекциях, когда обод 10 занимает, например положение б, В этот момент обе лопасти В находятся под одинаковьгм углом атаки, т,е. угол равен установленному первоначально, следовательно, движитель в этот момент создает только осевой упор. По мере дальнейшего поворачивания вала 1 движителя, напри1306808
часовой стреленный на фиг.1 етверть обороправой точки , а палец 12, 1 справа, досочки отклонен
л л п и в з н ны п жи ну ти ст ко ра ша ни др
В этом положении плоскость ступицы 7, повернувшись в проушинах 6, станет параллельна плоскости обода 10. Установочные углы лопастей не изменятся относительно друг друга и относительно ступицы, но изменится по- ложение лопастей 8 относительно оси вращения вала 1, а именно: лопасть 8, изображенная на фиг. 1 сверху, уменьшит угол атаки, а лопасть изображенная снизу, увеличит его. За следую- щую четверть оборота лопасти вновь займут положение, изображенное на фиГо 1, но поменявшись местами, т.е. положение равенства углов атаки относительно оси вращения вала.
Следовательно, за каждые пол-оборота вала 1 движителя одна лопасть увеличивает угол атаки до максимума и вновь возвращается к исходному среднему положению, другая в это же вре- мя уменьшает угол атаки до минимума. За каждый полный оборот движителя с одной его стороны упор увеличивается а с другой уменьшается.
Таким образом одновременно созда- с центром на осях вращения вала движителя и поворота лопастей, сквозь которую пропущен корпус вала, охватывающий шаровую опору обод, установленный на этой опоре с возможностью
ется и осевой, и боковой упоры и модель движется в направлении вектора сил. Обод 10 может быть установлен в любом положении на шаровой опоре 13,
следовательно, и направление боково- о вращения вокруг центра, а также под- го упора может быть изменено в пределах от О до 360°. Угол наклона обода 10 определяет не только направление бокового упора, но и степень его (чем меньше угол наклона обода 10, тем 5 меньше упор в плоскости вращения, а больше вдоль оси вращения и наоборот).
шипник, жестко связанный с ободом по его периметру, причем вьппеупомянутые пальцы установлены на обойме снаружи этого подшипника,
3, Движитель поп, 1, отличающийся тем, что ступица выполнена в виде плоского кольца.
4 Формула изобретения
1. Двухлопастный движитель, содер- жаищй вал с охватывающим его корпусом, ступицу с закрепленными на ней противоположно друг другу двумя лопастями, рычаг с отогнутыми и расположенными на одной прямой, перпендикулярной к оси вращений вала движителя, концами, связанный с его валом, а также регулятор направления упора этого движителя, отлкчающий- с я тем, что, с целью повьшгения маневренности транспортного средства путем регулирования его дифферента или тангажа, рычаг жестко связан с валом движителя, а лопасти жестко закреплены на ступигде, снабженной четырьмя проушинами, установленными на ней попарно на взаимно перпендикулярных прямых, причем оси отверстий проушин расположены в одной плоскости и проходят через оси вращения вала дви жителя, при этом рычаг своими отогнутыми кон1;ами установлен в отверстиях одной пары проушин с возможностью поворота лопастей вокруг этих концов, а регулятор направления упора движителя содержит универсальный шаровой шарнир с двумя пальцами, шар- нирно установленными в отверстиях другой пары проушин на ступице,
2, Движитель поп, 1, отличающийся тем, что универсальный шарнир содержит шаровую опору с
вращения вокруг центра, а также под-
шипник, жестко связанный с ободом по его периметру, причем вьппеупомянутые пальцы установлены на обойме снаружи этого подшипника,
3, Движитель поп, 1, отличающийся тем, что ступица выполнена в виде плоского кольца.
Редактор М. Дылын
Составитель А. Петрушин Техред л,Олейник
Заказ 1А87/16 Тир 409 ,Годписное
ВНИИГТИ Государственного комитета СССР
по делам изобретений и открытий 11.3035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Ф 122,1
Корректор Л. Патай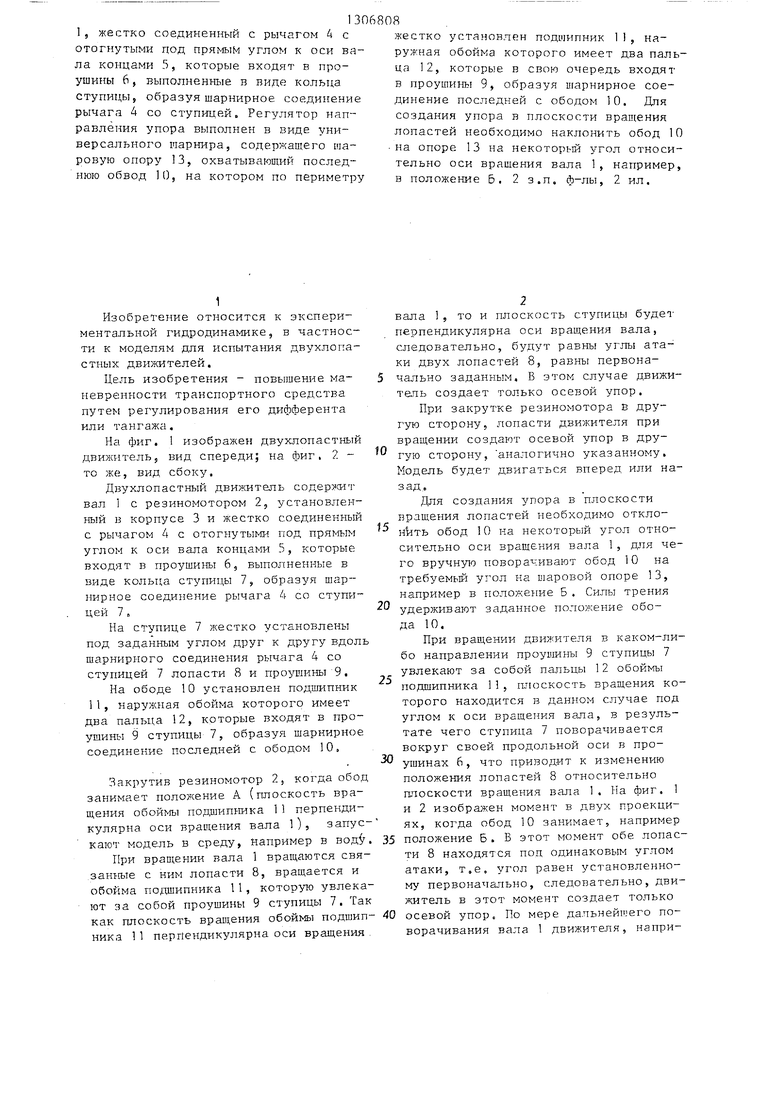
| название | год | авторы | номер документа |
|---|---|---|---|
| Судовой гребной винт | 1985 |
|
SU1306809A1 |
| Судовой гребной винт | 1986 |
|
SU1418194A1 |
| Двигательная установка водного транспортного средства | 1986 |
|
SU1421612A1 |
| КОМБИНИРОВАННЫЙ КРЫЛЬЧАТЫЙ ДВИЖИТЕЛЬ ПОДВОДНЫХ АППАРАТОВ | 2023 |
|
RU2806471C1 |
| Автомат перекоса многороторного летательного аппарата с жестким креплением лопастей и способ его работы | 2020 |
|
RU2749709C1 |
| ПРОПЕЛЛЕР ШПАДИ (ВАРИАНТЫ) И РАЗВЕРТКА ЕГО ЛОПАСТЕЙ | 2006 |
|
RU2330791C2 |
| Устройство для снятия початков и установки шпуль на прядильных машинах | 1948 |
|
SU81854A1 |
| Крыльчатый двигатель | 2020 |
|
RU2743564C1 |
| Судовой лопастной движитель | 1939 |
|
SU59074A1 |
| Автомат перекоса однороторного летательного аппарата и способ его работы | 2020 |
|
RU2740039C1 |
Изобретение относится к экспериментальной аэро- и гидродинамике, в частности к моделям для испытания двухлопастных движителей, и позволяет повысить маневренность судна путем регулирования его дифферента. Двухлопастный движитель содержит вал СЛ