Изобретение относится к трубопроводному контейнерному пневмотранспорту грузов.
Цель изобретения - повышение точности.
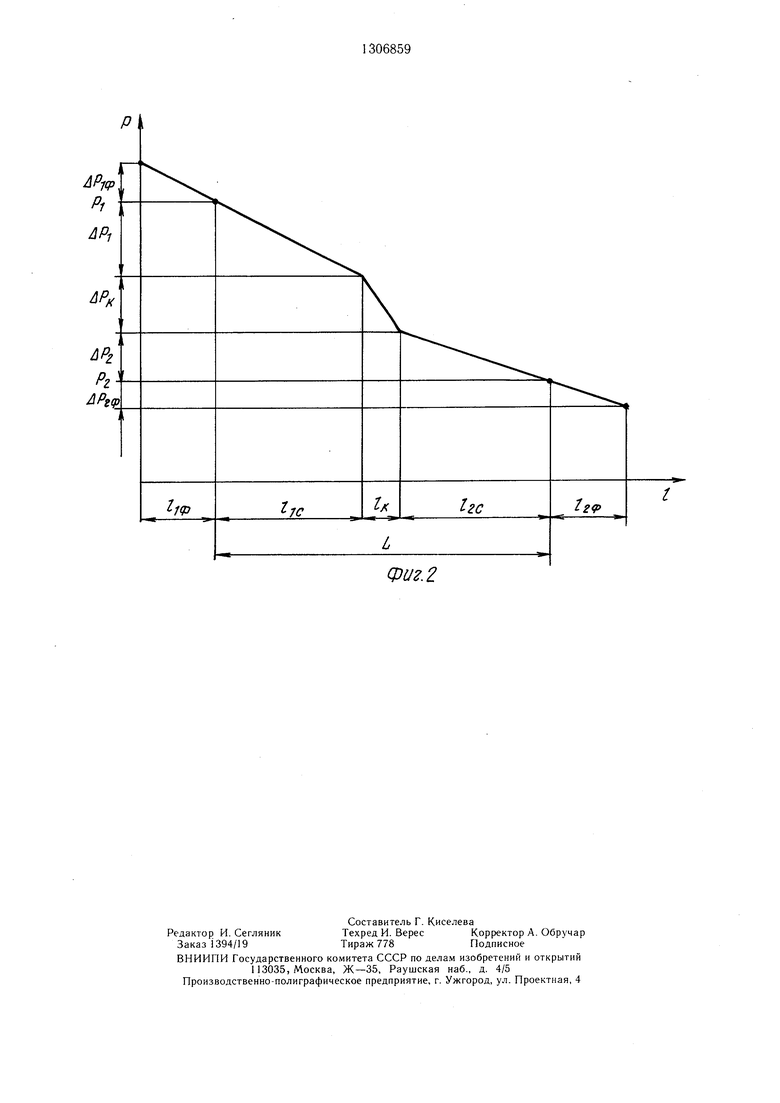
На фиг.1 представлена схема устройства определения перепада давления, иллюстрирующая предложенный способ; на фиг.2 - график зависимости изменения давления Р в транспортном трубопроводе вдоль контрольного участка L.
На транспортном трубопроводе (фиг.1) в начале и в конце контрольного участка длиной L установлены датчики 1 давления, до и за контрольным участком на фиксированном расстоянии /1ф и /2ф от датчиков 1 установлены датчики 2 давления. В начале контрольного участка также установлены датчик 3 прохождения контейнера 4. Все датчики соединены с вычислителем 5, который также имеет вход для сигнала теку- Hiero значения скорости контейнера, вводимого, например, с устройства непрерывного измерения скорости контейнера.
На фиг.2 точки Р и Pz на ординате графика соответствуют измеренному значению давления датчиками 1 в начале и в конце контрольного участка при нахождении контейнера 4 в его зоне. Отрезки ЛР1ф и / P-2tf соответствуют падению давления на фиксированных отрезках /|ф и /2 Ф трубопровода, а ДРк - перепад давления на контейнере 4 длиной /к, находящемся на контрольном участке, на расстоянии /и- от его начала и /2,- - до его конца.
Способ заключается в следующем.
При входе контейнера 4 на контрольный участок, о чем сигнализирует вычислителю 5 датчик 3, начинают производить измерение давления датчиками 1 и 2. Кроме того, интегрируют в вычислителе 5 непрерывно поступающий сигнал текущей скорости контейнера, определяя таким образом расстояние /I,- от начала контрольного участка до конца контейнера. Расстояние от начала контейнера 4 до конца контрольного участка /2с определяют из соотношения /2f L-/ic-/к- Определив величину потери давления ЛРкри ДР2ф на фиксированных отрезках трубопровода /1ф и /2ф, которое осуществляют в вычислителе 5 вычитанием значений измерений соответствующих датчиков 2 и 1 в начале контрольного участка и датчиков 1 и 2 в его конце, затем определяют потерю давления
АР: в транспортном трубопроводе контрольного участка в зоне от его начала и до конца контейнера 4, и АР2 - в зоне от начала контейнера 4 до конца контрольного участка.
При относительно малых протяженных контрольных участков применимо допущение, при котором ДР| и ДРг определяют из соотношений
др, А/ ДР2 :
.ср
При больших протяженностях контрольных участков значения ЛР| и ЛР2 корректируют по внесенной в вычислитель 5 зави- , симости или по апроксимйрующей ее ломанной линии.
Суммирование сигналов APi и АР2 позволяет определить потерю давления в трубопро-. воде контрольного участка. После этого определяют перепад давления на контейнере 0 по соотношению АРх PI-Р2-(АР| + + АР2), что также видно из графика (фиг.2).
Произведя все измерения и действия непрерывно и осуществляя все необходимые операции в вычислителе 5, в последнем получают непрерывное текущее значение перепада давления на контейнере.
Таким образом, корректируя перепад давления (Pi-Ра) па контрольном участке на величину потери давления на нем (APi + + АР2), получают точное значение перепада давления на контейнере АРк.
Формула изобретения
Способ определения перепада давления на контейнере для трубопроводного транспорта грузов, включающий в себя измерение перепада давления между началом и концом контрольного участка транспортного трубопровода, отличающийся тем, что, с целью повышения точности, дополнительно
0 определяют перепад давления па фиксированных отрезках трубопровода до и после контрольного участка трубопровода, определяют путь, пройденный контейнером на контрольном участке, и определяют перепад давлений на контейнере, как разность между
5 перепадом давления на контрольном участке и потерями давления на нем, определяемыми по значениям перепада давления на фиксированных отрезках трубопровода и пройденным путем контейнера.
5
Pi
UP-,
UP
4/
PZ-
ЧФ
7C
1гс
фиг. 2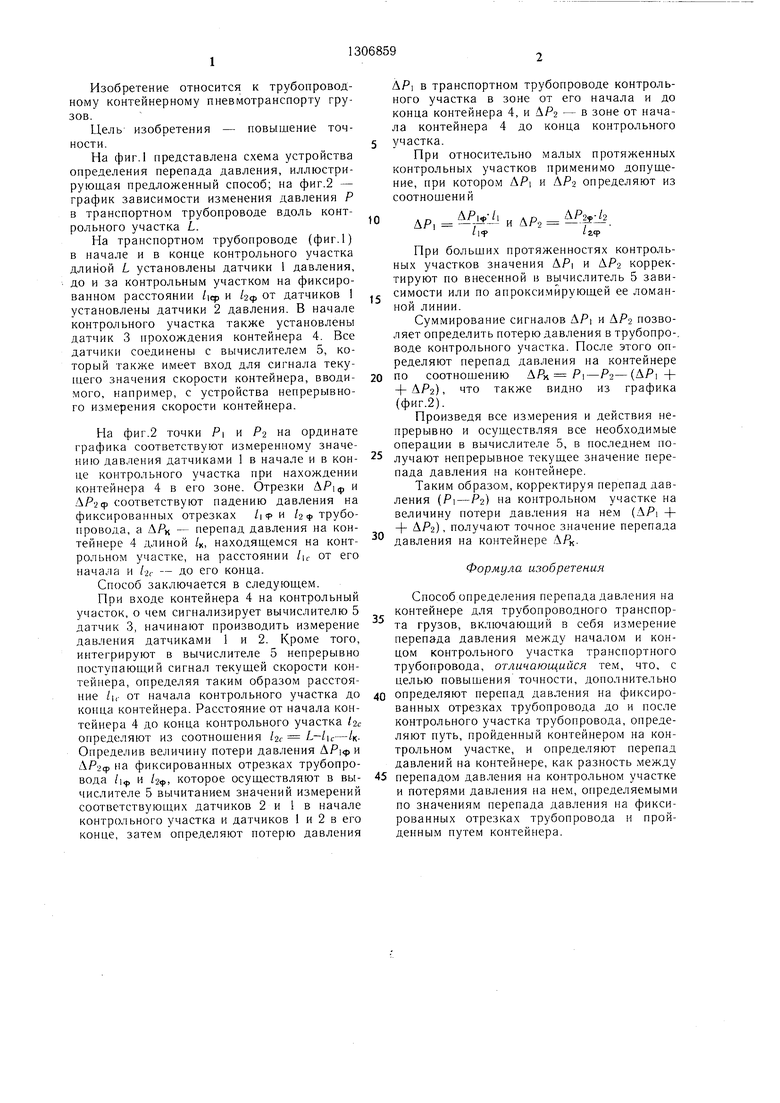
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения коэффициента трения и динамической постоянной контейнера пневмотранспортной установки | 1985 |
|
SU1355570A1 |
| АВТОМАТИЗИРОВАННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТ УСТАНОВКИ НАСОСНЫХ СТАНЦИЙ НА ТРАССЕ СБОРНО-РАЗБОРНОГО НЕФТЕПРОДУКТОПРОВОДА | 2017 |
|
RU2664871C1 |
| СПОСОБ ПРОВЕДЕНИЯ ИСПЫТАНИЙ ПРОТИВОТУРБУЛЕНТНОЙ ПРИСАДКИ НА НАТУРНЫХ ТРУБОПРОВОДАХ | 2011 |
|
RU2488032C1 |
| АВТОМАТИЗИРОВАННАЯ ИНФОРМАЦИОННАЯ СИСТЕМА ДЛЯ НЕПРЕРЫВНОГО КОНТРОЛЯ ЗА РАБОТОЙ НАСОСНО-ТРУБОПРОВОДНОГО КОМПЛЕКСА ДЛЯ ПЕРЕКАЧКИ ВОДЫ И НЕФТЕПРОДУКТОВ | 1997 |
|
RU2165642C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2010 |
|
RU2437127C1 |
| СПОСОБ МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДОВ НАДЗЕМНОЙ ПРОКЛАДКИ В УСЛОВИЯХ ВЕЧНОЙ МЕРЗЛОТЫ | 2015 |
|
RU2571497C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕКАЧКОЙ ЖИДКОСТИ ПО ТРУБОПРОВОДУ | 2013 |
|
RU2520802C1 |
| СПОСОБ НЕПРЕРЫВНОГО КОНТРОЛЯ ЗА РАБОТОЙ НАСОСНО-ТРУБОПРОВОДНЫХ СИСТЕМ ДЛЯ ПЕРЕКАЧКИ ВОДЫ И НЕФТЕПРОДУКТОВ | 1997 |
|
RU2114325C1 |
| Устройство для автоматического торможения подвижного состава | 1976 |
|
SU579744A1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
Изобретение относится к трубопроводному контейнерному пневмотранспорту грузов. Цель изобретения - повышение точности. Способ определения перепада давления на контейнере заключается в том, что перепад определяют как разность между перепадом давления на контрольном участке и потерями давления на нем, определяемыми по значениям перепада давления на фиксированных отрезках трубопровода и пройденным путем контейнера 4. Датчик 3 сигнализирует вычислителю 5 о входе контейнера 4 на контрольный участок. В это время датчики 1 и 2 измеряют давление. В вычислитель 5 непрерывно поступает сигнал текущей скорости контейнера 4. В вычислителе 5 непрерывно получают текущие значения перепада давления на контейнере 4. 2 ил. S (Л СО о 05 00 сд со
| Авторское свидетельство СССР № 755720, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
