1
(2П4310231/40-11
(22)28.09.87
(46)07.01 ,90. Бюл. N 1
(72)Г.В.Блинов
(53)621.864 (088.8)
(56)Авторское свидетельство ССТР № 1291534, кл. В 66 F 11/04, 1987,
Авторское свидетельство СССР 962196. кл. В 66 F 9/06. 1979.
(54)ПОДЪЕМНИК ДЛЯ ПРОВЕДЕНИЯ -МОНТАЖНЫХ РАБОТ
(57)Изобретение относится к грузоподъемным устройствам, обеспечиваю щим монтажные работы в строительной технике, в транспортном машиностроении. Цель изобретения - повышение
функциональных возможностей путем обеспечения доводочных операций при наводке груза в вертикальной плоскости. Подъемник содержит подвижное основание 1. стрелу 4, связанную с рычагом 8 через убчатое колесо 13, закрепленное на цапфах 7 рычага 8, Цапфы 7 установлен:-/ в вилках 6,выполненных на конце стрелы 4, на которой закреплен зубчатом срктор 28, свя- з -i шй чере . 34 с рычажной системой, лпакчой шатеном 31,стрелой 4 и коромыслами 33, связанными с пригоцом 30, На тгэтуне 31 установлен блокирующий механизм с устройством торможения, 1 ч,пс ф-лы, 9 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНИК ДЛЯ ПОГРУЖЕНИЯ ИНВАЛИДА В БАССЕЙН | 1993 |
|
RU2063376C1 |
| Подъемник | 1987 |
|
SU1477670A1 |
| Машина для устройства горизонтальной разметки | 1988 |
|
SU1599462A1 |
| Загрузочное устройство шахтной печи | 1982 |
|
SU1134121A3 |
| СУДНО, ПИТАЕМОЕ И ДВИЖИМОЕ ЭНЕРГИЕЙ КАЧКИ СВОЕГО КОРПУСА | 2006 |
|
RU2365520C2 |
| Автомат для мерной резки проволоки | 1983 |
|
SU1169783A1 |
| ТОЛЧКОВЫЙ ПОДАЮЩИЙ ДЕРЕВО МЕХАНИЗМ В ЛЕСОПИЛКЕ | 1926 |
|
SU6457A1 |
| САМОХОДНАЯ УСТАНОВКА ДЛЯ ВОЗВЕДЕНИЯ АНКЕРНОЙ КРЕПИ | 2021 |
|
RU2765002C1 |
| Устройство для регулирования пути движения коньков и направляющих пальцев нитеводителей плосковязальных машин | 1948 |
|
SU82558A3 |
| Устройство для ультразвукового контроля изделий | 1990 |
|
SU1781598A1 |

Изобретение относится к грузоподъемным устройствам, обеспечивающим монтажные работы в строительной технике, в транспортном машиностроении. Цель изобретения - повышение функциональных возможностей путем обеспечения доводочных операций при наводке груза в вертикальной плоскости. Подъемник содержит подвижное основание 1, стрелу 4, связанную с рычагом 8 через зубчатое колесо 13, закрепленное на цапфах 7 рычага 8. Цапфы 7 установлены в вилках 6, выполненных на конце стрелы 4, на которой закреплен зубчатый сектор 28, связанный через тягу 34 с рычажной системой, образованной шатуном 31, стрелой 4 и коромыслами 33, связанными с приводом 30. На шатуне 31 установлен блокирующий механизм с устройством торможения. 1 з.п. ф-лы, 9 ил.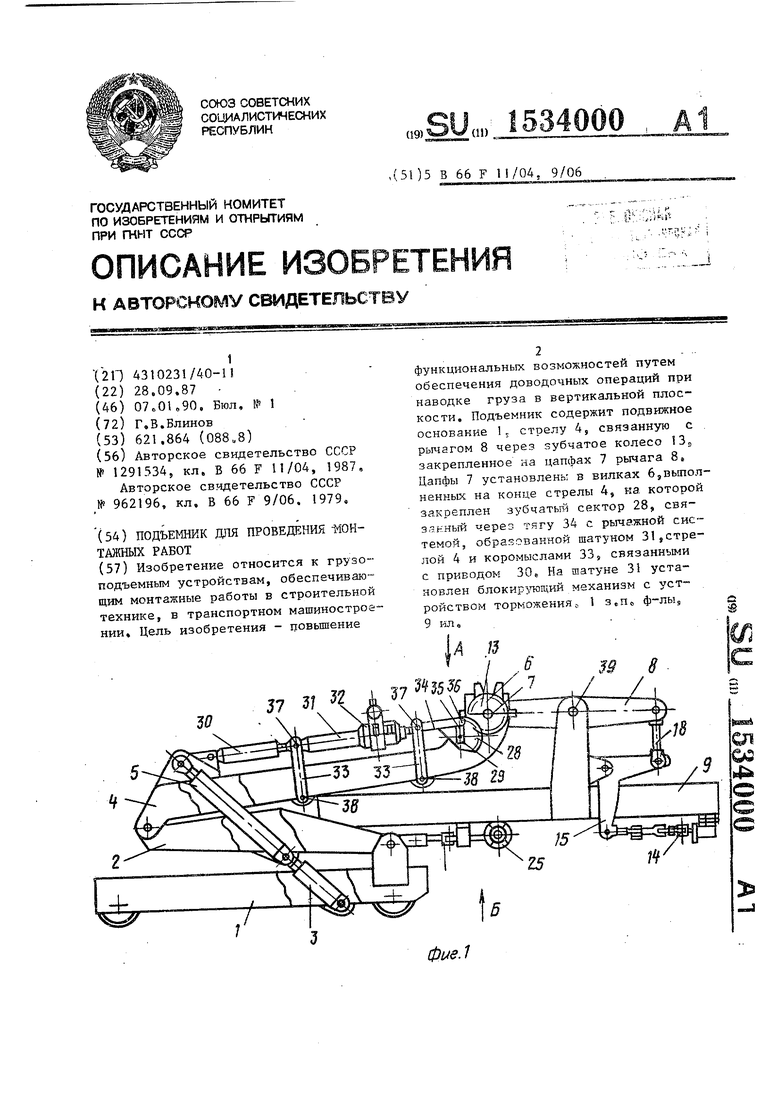
30
57
ел ос
фие.1
Изобретение относится к грузоподъемному оборудованию, а именно к монтажным подъемникам для проведения стыковочных операций при монтажных работах и обслуживания крупногабаритных сооружений.
Цель изобретения - расширение функциональных возможностей.
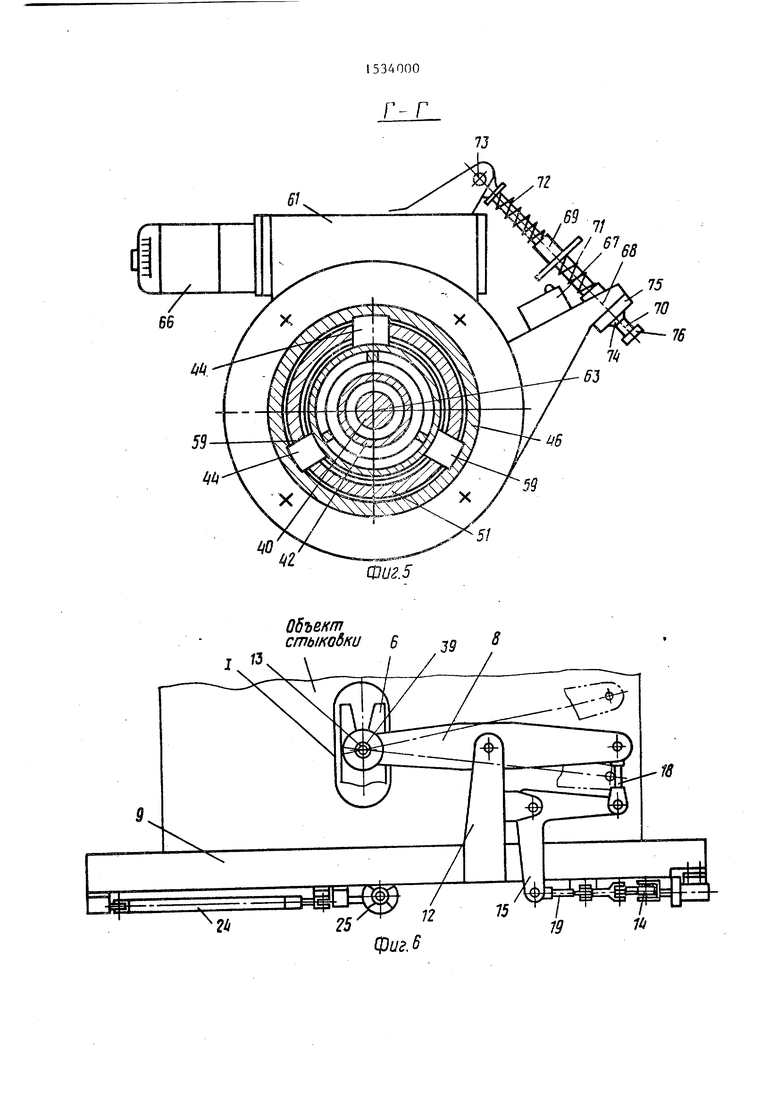
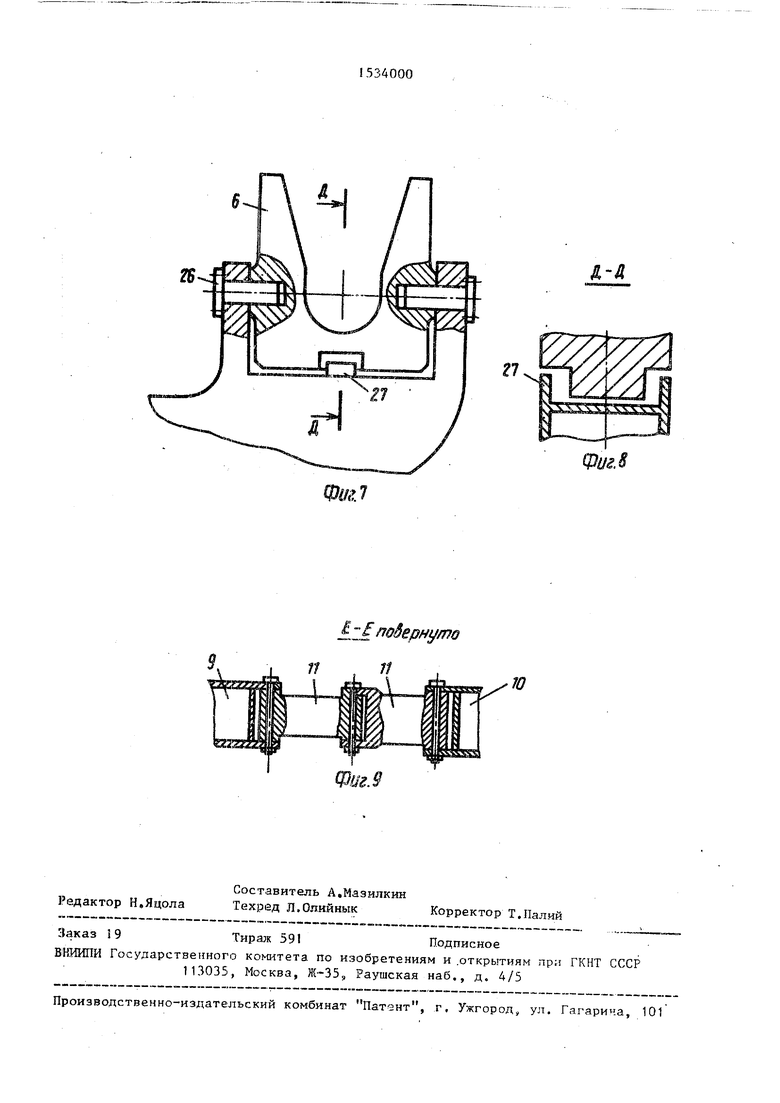
На фиг,I изображен подъемник,об- щий вид; на фиг, 2 - вид А на фиг.1; на фиг.З - вид Б на фиг,1; на фиг,4 - разрез В-В на фиг.2; на фиг. 5 - разрез Г-Г на фиг,4; на фиг. 6 - грузо- удерживающее устройство с элемента- ми подвески на конце стрелы; на фиг. 7 - крепление вилки; на фиг.8 - сечение Д-Д на фиг.7; на фиг,9 - сечение Е-Е на фиг.З.
Подъемник (фиг.1) содержит подвиж- ное основание 1 с шарнирно закрепленным на нем коленом 2 и силовым приводом 3, служащим для его перемещения, На колене 2 гаарнирно закреплена стрела 4, перемещение которой осущест- вляет силовой привод 5. В опорных вилках 6, закрепленных на конце стрелы 4 своими цапфами 7, установлены рычаги 8, на противоположных концах которых подвешен рабочий орган, сое- гоящий из рамы 9 с грузонесущим устройством 10, соединенным с рамой 9 двузвенными рычагами 11. Рама 9 шарнирно подвешена на рычаге 8 через штанги 12, На цапфах 7 жестко закреп- лены зубчатые колеса 13.
Рама 9 связана с рычагами 8 через уравновешиваемые траверсы 14,двуплечие рычаги 15 - 17 и тяги 18 - 21, причем траверса 14 установлена в вилке 22 противоперегрузочного механизма 23, а грузоудерживающее устройство 10 связано с рамой 9 двумя механизмами 24 продольного перемещения и одним механизмом 25 попереч- ного перемещения.
Опорные вилки 6 для компенсации угловых перемещений при отклонении рычагов 8 закреплены на стреле 4 шарнирно осями 26. Для ограничения нак- лона предусмотрены упоры 27, Опорные вилки 6 одновременно выполняют роль ловителей цапф 7 рычагов 8, На стреле 4 закреплены зубчатые сектора 28 с помощью осей 29, обеспечивающие зацепление с зубчатыми колесами 13,
Подъемник снабжен рычажной системой с приводом 30 ее перемещения, образованной стрелой 4, шатуном 31
с установленным на нем блокирующим механизмом 32, и качающихся коромысел 33, шарнирно закрепленных на стреле 4 и связанных с приводом 30, а тягами 34 и 35 - с эксцентрично расположенной осью 36 зубчатого сектора 28. Качающиеся коромысла 33 рычажной системы соединены с шатуном осями 37 и осями 38 - со стрелой 4,
Блокирующий механизм 32 предназначен для полуавтоматического разобщения силового привода 30 с тягой 34, что необходимо для обеспечения зацепления зубьев колес 13 и зубчатых секторов 28 при заведении цапф 7 рычагов 8 в опорные вилки 6, а также для обеспечения свободного качания рабочего органа вокруг геометрической оси 39, что необходимо для сопряжения стыкуемых поверхностей (центр тяжести всей системы проходит через указанную ось 39).
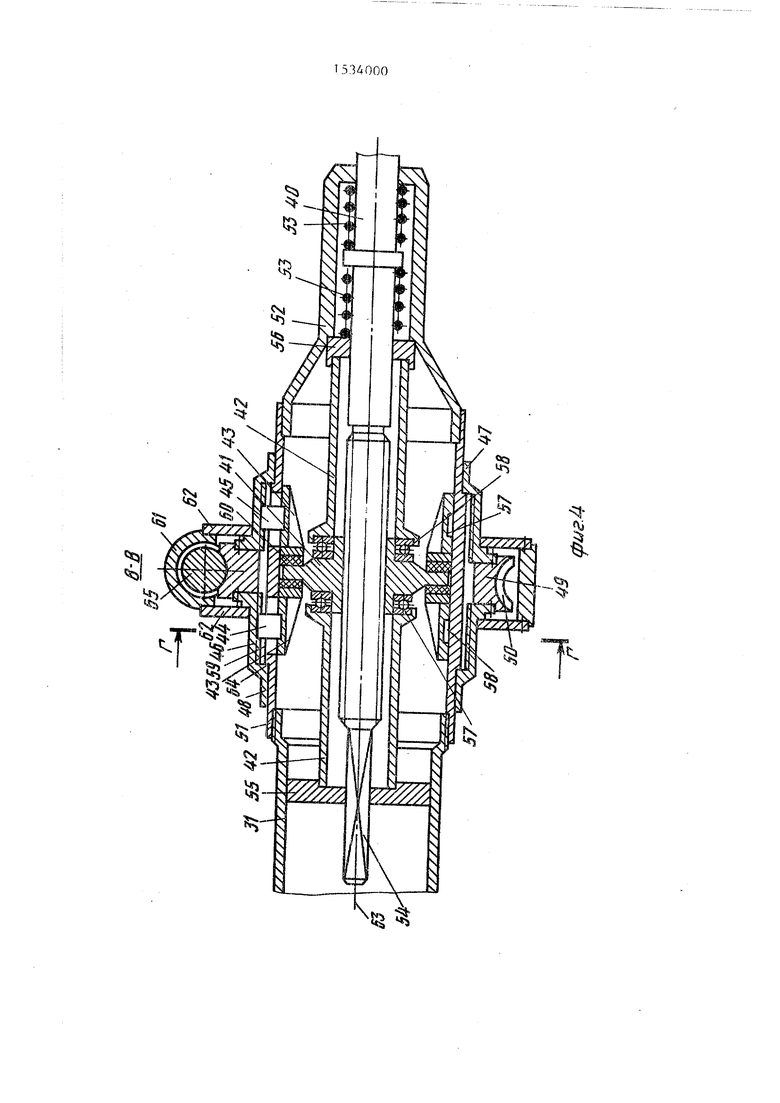
Блокирующий механизм состоит из штока 40 с несамотормозяшейся резьбой на конце и взаимодействующего с ним посредством ответной резьбы соос- ного поворотного диск,1 41, ограниченного от продольного перемещения распорными втулками 42. Шток 40 соединен с тягой 34, Блокирующий механизм 32 представляет собой фрикцион- нуго муфту, состоящую из замыкающих соосный поворотный диск 4I нажимных дисков 43 с резьбовыми вкладышами 44 и 45, размещенными в снабженном разнонаправленной резьбой корпусе 46, составленном из резьбовых втулок 47 и 48, соединенных с червячнык колесом 49 редуктора 50, закрепленного на корпусе 46. Последний установлен на стакане 51, являющимся продолжением шатуна 31 и соединенным с ней посредством резьбового соединения. Другой своей частью стакан 51 соединен с оголовком 52, в котором установлены демпфирующие пружины 53, противодействующие перемещению штока 40, обеспечивающие возврат его в исходное положение, исключающие раскачивание рабочего органа и компенсирующие разброс центров масс системы. Шток 40 своим квадратным хвостовиком 54 контактирует с вкладышем 55 тяги 31, Этот же вкладыш 55 служит для фиксации распорной втулки 42.Другая противоположная распорная втулка 42 фиксируется вкладышем 56,установленным в оголовке 52. Вкладыши 55 и
51
56 одновременно центрирует pacnopHFie втулки 42, Подшипники 57 уменьшают потери на трение и позволяют проит- вести установку диска 41 с минимальным осевым люфтом.
Нажимные диски 43 выполнены в виде обечаек с торцовыми кольцами и имеют в обечайке проточку 58, в которую установлены резьбовые вкладыши 44 и 45, установленные также и в пазах 59 стакана 51. Пазы 59 равнорас- ппложены по окружности стакана 51. На торцах нажимных дисков 43 закреплены фрикпнонные накладки 60, взаимодействующий при их сведении с венцом соосного поворотного диска 41.
Соединение корпуса 46 с корпусом 61 редуктора 50 осуществляется с помощью крышек 62, Вкладыши 44 и 45 имеют соответственно левую и правую резьбу и соединяются с ответными втулками 47 и 48 корпуса 46. Корпус 61 редуктора 50 может вращаться относительно продольной оси 63 уг-1рс й- ства.
От продольного перемещения Kopnvc 6 фиксируется внутренними торцовыми поверхностями 64 втулок 47 и 48 по уступу стакана 51, Крышки 62 г.ц- новременно фиксируют червячное колесо 49 по отношению к червяку 65,который приводится во вращение электродвигателем 66 с дистанционным управлением. Полуавтоматическая работа блокирующего устройства обеспечивается выключением работы электродвигателя 66 посредством микровыключателя 67, закрепленного на кронштейне 68, установленного на стакане 51 и приводимого в действие тарельчатым толкателем 69,перемещающимся по штоку 70, Пружины 71 и 72, установленные на штоке 70, обеспечивают свободный ход при выключении и поддерживают толкатель 69 в заданном положении. Для компенсации угловых перемещений штока 70 предусмотрена ось 73,соединяющая его с кронштейном корпуса 61, держатель 74 со сферической головкой и крышка 75, Ограничитель 76 служит для ограничения перемещения корпуса 46 при его относительном вращении вокруг оси 63.
Подъемник работает следующим образом.
Стыкуемый объект устанавливается на грузоудерживающее устройство 10 рамы 9 и крепится к нему с помощью
5
0006
крепежных элементов (не показаны), Подвижное основание 1 обеспечивает переметение подъемника в рабочую зону. При вьпюлнечии стыковочной операции подъемник подъезжает. Совместным действием приводов 3 и 5 обеспечивается плоскопараллелыюе перемещение вверх рабочего органа с объектом
Q за счет относительного вращения вокруг своих осей колена 2 и стрелы 4, Поивод 30 находится в исходном положении. Блокирующий механизм 32 выключен, т.е. обеспечивается жесткая
5 связь между тягами 35 кулисного механизма и стрелой 4,
После ориентации стыкуемого объекта в горизонтальной плоскости с по- мошью механизмов 24 продольного пере0 мещения и механизма 25 поперечного перемощения производится подводка стыкуемого объекта к месту стыковки, причем при синхронной работе сразу двух механизмов 24 перемещения осу5 щестя пяетс ч дг-ижение стыкуемого
)бъекта совместно с грузоудерживам- щим устройством 10 по отношению к p-iMi- 9 за счет склад гвания (раскла- ДНРЛЧИЯ) четырех дв венных рычзгов
-jt) 11 ч,юль продолт-чон оси подтемника, Ппи разнонаправленной работе механизмов 24 осуществляется разворот рамп 9 впол;. вертикальной оси. При подведении стыкуемых поверхностей на достаточно близкое расстояние включается бтокирующий механизм 32„ ри этом включается дистанционное управление тпектродригателем 66, Микровыключатепт- 67 блокируется
.г, кнопкой Пуст, и электродвигатель 66 приводится во ррпщ1-ние. Во вращение приводится и червяк 65, который( воздействуя на червячное колесо 49, заставляет его врашаться. Так как
механизм находится в напряженном состоянии и все зазоры выбраны, то в начальный момент начинает вокруг Си 63 вращаться весь корпус 61 редуктора 50 до тех пор, пока ограничитель
о 76 не соприкоснется с держателем 74, после чего относительное вращение корпуса 61 редуктора 50 прекращается, и начинает вращаться корпус 46,соединенный с червячным колесом 49.
5
5
При вращении втулок 46 и 47 их внутренние резьбовые поверхности начинают воздепстновать на резьбо- ьые венцн вкладышей 44 и 45, Последпне начинают перемещаться в пазах 59 стакана 51 и, воздействуя на кольцевые проточки 58 нажимных элементов 43, отводят их, разобщая накладки 60 с венцом диска 41, который получает возможность вращения вокруг оси 63 в подшипниках 57, распертых втулками 42. При возникновении усилия, воздействующего на шток 40, пос- ледний, взаимодействуя на несамотормозящуюся резьбу диска 41, заставляет его проворачиваться и тем самым получает возможность продольного перемещения. Квадратный хвостовик 54 штока 40, перемещающийся во вкладыше 55, препятствует его провороту.
Стыкуемый объект получает возможность качания относительно двух взаимно перпендикулярных осей, одна из которых (ось 39) совпадает с осями цапф 7, а другая - является продольной осью подъемника. Это качание обеспечивает равномерное сопряжение стыкуемых поверхностей по всему пе- риметру при движении рабочего органа вверх.
Качание осуществляется следующим образом. Поскольку блокировочный механизм 32 преобразовывается в под- вижное звено, то зубчатый сектор 28 получает возможность вращения относительно осей 29. Зубчатые колеса 13 не встречая противодействия со стороны зубчатых секторов 28, позволяют осуществлять проворот цапф 7 относительно геометрических осей 39,обеспечивая тем самым качание рычагов 8 относительно той же оси. Качание относительно продольной оси обеспе- чйвается за счет наклона рычагов 8 при повороте их вокруг осей штанг 12 на разный угол относительно плоскости рамы 9.
Разность углов наклона компенсиру ется разворотом уравновешивающей траверсы 14 в вилке 22 при передаче на нее компенсационных усилий с помощью двуплечих рычагов 15 - 17, которые
соответственно с рычагами 8 разво
рачиваются на определенный угол и осуществляют линейные перемещения
тяг 18 - 21.
После сопряжения стыкуемых поверхностей для обеспечения сохран- ности стыкуемых объектов вилка 22 с уравновешивающей траверсой 14 может, встречая противодействия проти- воперегрузочного механизма 23,вытяги
0 5
0 . Q
5
0
ваться из него, чем обеспечивает свободный ход подъемника.
Подъемник работает и как кантователь, для чего механизм 32 блокировки в порядке, обратном рассмотренному, преобразуется в жесткую систему, и под воздействием усилия от силового привода 30 тяга 34 заставляет вра- латься зубчатый сектор 28 и вместе с ними - зубчатые колеса 13, что обеспечивает наклон рамы на заданный угол. При наклоне рамы на 90° обеспечивается возможность выполнения стыковочных операций при пристыковке объекта к вертикальной плоскости. Операция стыковки аналогична рассмотренной стыковочной операции на горизонтальной плоскости, так как демпфирующие пружины 53 при указанном требовании совмещения центра масс системы с осью 39 обеспечивают удержание рамы 9 в заданном положении при включенном механизме 32 блокировки. Совмещение объектов осуществляется ходом подъемника.
Механизм 32 блокировки включается и в момент посадки цапф 7 в опорные вилки 6 ловителей при замене рабочего органа. При этом обеспечивается соединение зубчатых пар сектора 28 и колеса 13 и исключается возможность попадания зуба на зуб. Установка опорных вилок 6 на осях 26 обеспечивает компенсацию перекосов цапф 7 при наклоне рычагов 8 на разный угол.
Операции отстыковки с помощью подъемника противоположны стыковочным операциям.
Формула изобретения
Фиг
SZjgjr/ts
is
Фиг.З
u
е r
f1
LT)
U
ТВ
ФигЛ
л-д
Фиг. 8
Е-Ј подернуто
Фиг.9
