Прибор предназначен для измерения и записи вертикальной качки судов. Работа его основана на двухкратном интегрировании ускорений, возникающих при вертикальной качке судна, в связи с чем прибор снабжен индуктивным датчиком для измерения ускорений, стабилизированным гиромаятником и двойным электронным генератором.
Отличительная особенность прибора заключается в том, что в нем исключено влияние дрейфа нуля датчика и усилителей, свойственное известным приборам, используемым для аналогичных целей. Достигается это путем применения в интеграторе обратной связи, состоящей из параллельно включенных емкости и омического сопротивления, обеспечивающей сохранение интегрирования с высокой точностью в вероятной полосе частот спектра вертикальной качки. Эта особенность прибора позволяет производить измерения с большей точностью, чем известные приборы.
Работает прибор следующим образом.
Сигнал переменного тока с индуктивного датчика ускорений обычного типа, стабилизированного с помощью гироскопического маятника, поступает на усилитель, а затем на фазовый дискриминатор, где преобразуется в сигнал постоянного тока, который является входным для первого интегратора. Каждый интегратор представляет собой усилитель постоянного тока., охваченный обратной связью.
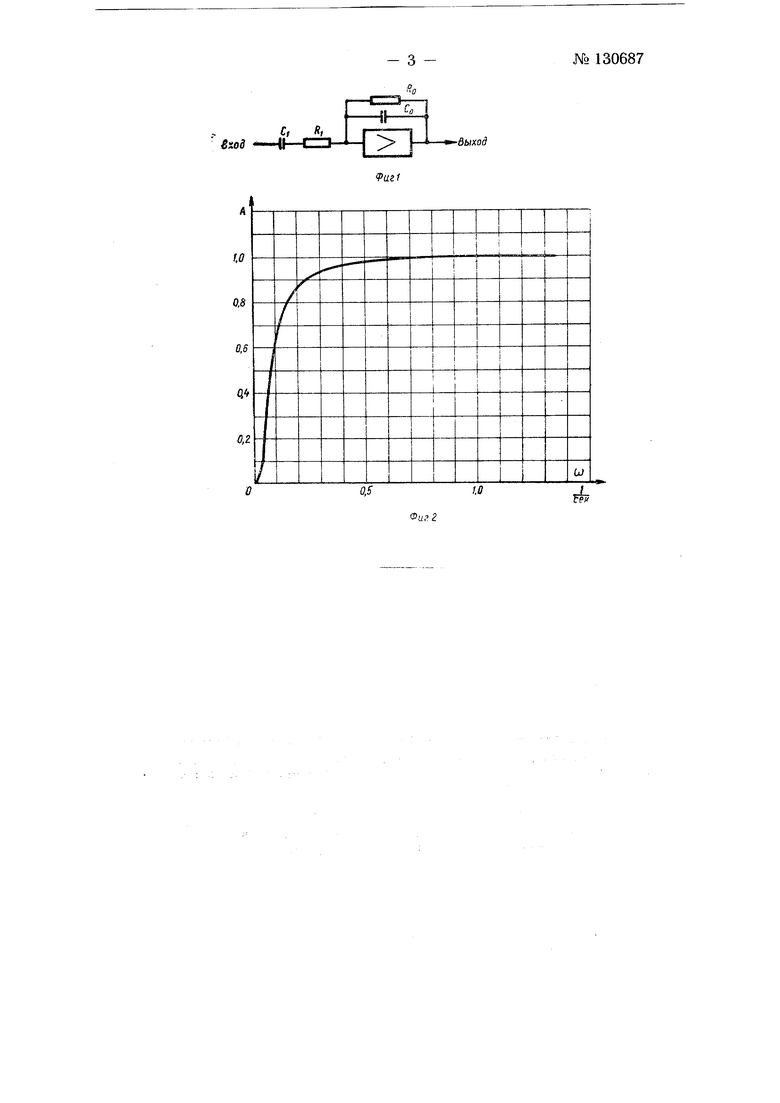
С целью исключения влияния дрейфа нуля датчика ускорений и усилителей постоянного тока, передаточная функция интегратора в области очень низких частот выполнена отличной от передаточной функции идеального интегратора. Для этого применена обратная связь в усилителях постоянного тока, осуществленная по схеме, изображеиной на фиг. 1.
№ 130687
Передаточная функция такого интегратора имеет вид:
, - У Т, R, С,
ф (/«о) . . .0 , где ,.- „ ,, „ ,, -(1 + Гз7«)-f2 GO Q.
Амплитудная характеристика прибора, т. е. отношение зарегистрированной амнлитуды вертикальных перемещений к действительной, приведендла фиг. 2.:- -,.
Е5 области частот, где обычно бывает расположен спект р вертикальной качки, ,т. е. при частотах, больших 0,2-0,3, амплитудная
характеристика полога и мало, отличается от единицы.
После двухкратного интегрирования сигнал поступает на шлейф осциллографа, непосредственно производяш,его регистрацию процесса вертикальной качки.
Описываемый прибор изготовлен и проверен в рабочих условиях Результаты испытания-положительные.
;Предмет изобретения
Прибор для измерения вертикальной качки, содержащий индуктивный датчик, стабилизированный гиромаятником, и двойной электронный генератор, отличающийся тем, что, с целью устранения влияния дрейфа нуля датчика и усилителей, в интеграторе применена обратная связь, состоящая из параллельно включенных емкости и омического сопротивления, обеспечивающая сохранение интегрирования с высокой точностью в вероятной полосе частот спектра вертикальной качки.
л
4
fnod
выход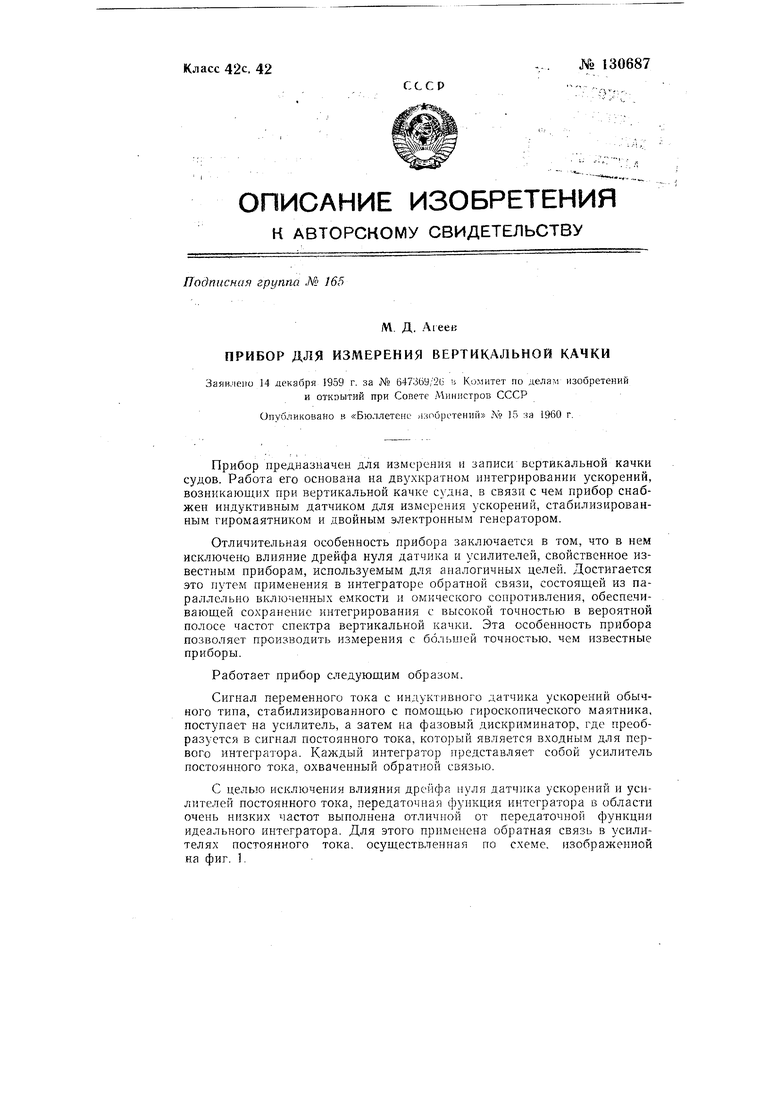
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕРТИКАЛЬНОЙ КАЧКИ СУДНА | 2001 |
|
RU2184675C1 |
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2003 |
|
RU2244261C1 |
| Измеритель вертикальной скорости качки | 1972 |
|
SU444112A1 |
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2007 |
|
RU2332642C1 |
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2005 |
|
RU2277223C1 |
| Способ измерения магнитного курса судна с использованием системы коррекции | 2023 |
|
RU2804444C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИЙ И УГЛОВ ОРИЕНТАЦИИ КОРАБЛЯ С УЧЕТОМ ДЕФОРМАЦИЙ | 2004 |
|
RU2261417C1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ ВО ВРЕМЕННОЙ ИНТЕРВАЛ | 1990 |
|
RU2018136C1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ ВО ВРЕМЕННОЙ ИНТЕРВАЛ | 1990 |
|
RU2018137C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕРТИКАЛЬНОЙ КАЧКИ СУДНА | 2003 |
|
RU2234060C1 |