1
Изобретение относится к области измрительной техники, в частности к гироскопическим интеграторам ускорений, и может быть использовано для измерения вертикальной скорости качки судов.
Известные гироскопические интеграторы ускорений в выходном сигнале имеют составляющие от вредных моментов по оси внутренней рамки и от ускорения силы тяжести, не подлежащие измерению, что ухудшает точность измерителя.
Предлагаемое устройство отличается от известных тем, что оно снабжено отрицательной обратной связью от датчика угла на оси наружной рамки через сумматор к датчику момента на оси внутренней рамки, причем выход датчика угла соединен с первым входом сумматора и через интегратор - со вторым входом сумматора.
Это позволяет увеличить точность измерений.
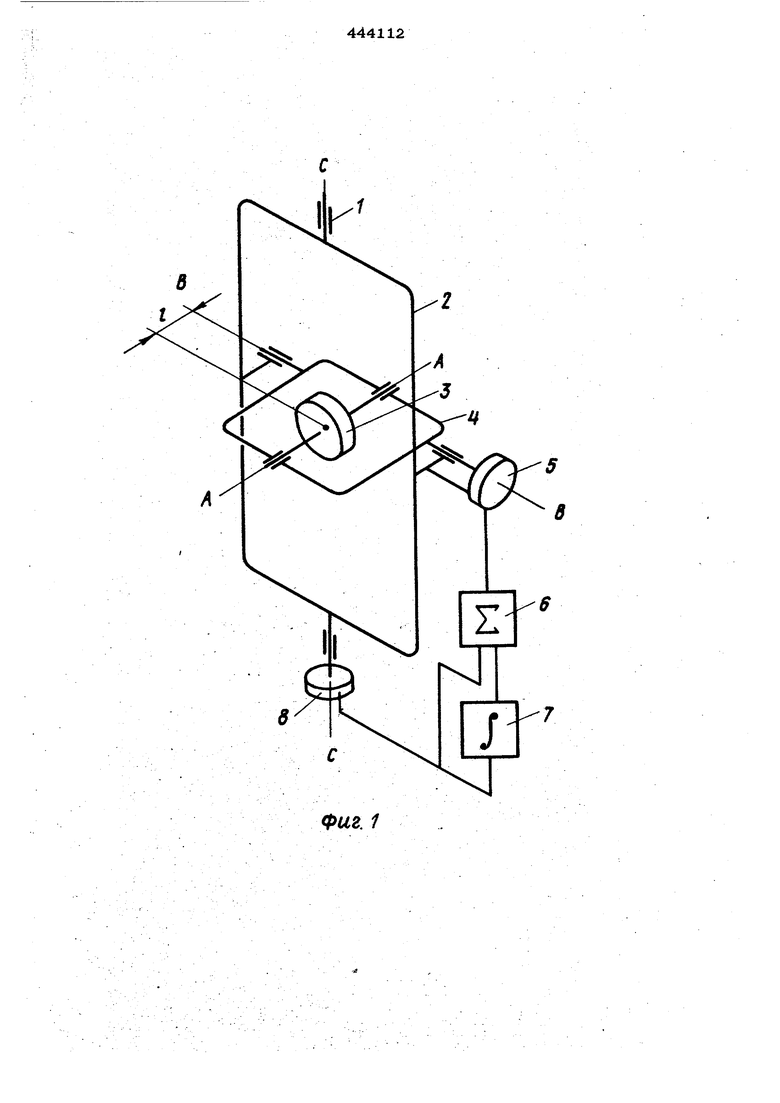
На фиг. 1 изображена кинематическая схема предлагаемого прибора; на фиг. 2 его структурная схема; на фиг. 3- логарифмические амплитудная и фазовая частотные характеристики, поясняющие работу предлагаемого прибора.
Прибор для измерения вертикальной скорости качки судна состоит из корпуса 1, стабилизированного по курсу и в j плоскости горизонта, в котором в по; шицниках, закрепленных по наружной оси подвеса СС, установлена наружная рамка 2 гироскопа. Ротор 3 гироскопа установлен в подшипниках, закрепленных по i оси АА по внутренней рамке 4 карданбва подвеса гироскопа, которая в свою очередь может поворачиваться относительно внутренней оси подвеса ВВ в наружной ракосе 2. Ось ВВ смещена на расстояние
t относительно центра тяжести ротора 3, и внутренней рамки подвеса 4. Датчик моментов 5 относительно внутренней оси подвеса ВВ включен на выход сумматора 6, входы которого соединены с выходом интегратора 7 и выходом датчика угла 8 поворота относительно наруж ной оси подвеса СС. Вход интегратора 7 связан с выходом датчика 8 угла. При
включенном питании гироскоп заарретирован с помощью арретира (на чертеже не.показан). , Прибор работает следующим образом.
После включения питания и разгона
ротора 3 гиромотора до номинальных .оборотов гироскоп разаррётируется, и в (Приборе начинается переходный процесс. /Под действием ускорений, параллельных наружной оси СС подвеса гироскопа, начи- нается поворот гироскопа относительно корпуса 1 прибора в направлении, определяемом направлением вращения ротора 3 гиромотора и направлением действия ускорений в соответствии с законом прецессии Одновременно с ростом сигнала датчика 8 .угла увеличивается и выходное напряжение интегратора 7, в результате чего при некотором угле поворота гироскопа момент, развиваемый датчиком моментов 5, становится больше момента, обусловленного ускорениями. После этого гироскоп начинает вращаться в обратном направлении (к ну- левому положению). Переходный процесс продолжаетчзя до тех пор, пока момент,
развиваемый датчиком моментов 5, не компенсирует действие постоянных ускорений и дрейф нуля гироскопа. По окончании переходного процесса гироскоп совершает колебания относительно Аулевого датчика 8 угла на углы, пропорциональные скорости вертикальной качки судна.
Структурная схема предлагаемого прибора для измерения вертикальной скорости качки судна, изображенная на фиг.2, имеет следующие обозначения: Wl - коэффициент, связывающий действукщее на прибор ускорение W с вызываемым
им моментом Mwj
, W(p) (P) Р - передаточная функция гироинтегратора линейных уско рений по отношению к моменту М при отсутствии цепи обратной связи; V - угол поворота гироскопа относигтельно корпуса прийэра; К - коэффициент усиления гироскопа; W (Р -ЛШ-- %. - пёре даточная функция звена отрицательной обратной связи;.
М - момент датчика моментов по внутренней оси подвеса гироскопа;
К - коэффициент передачи по сигналу
датчика угла,
К„ - коэффи1шент передачи по интего
ралу от сигнала датчика угла.
Передаточная фушошя получаемой замкнутой системы по отношению к дейс-гвующему на прибор ускорению имеет вид ,
К fpb WI--J B- wCP). ap2.
К, , .
где
к,к.
Рассматривая логарифмические
тудную и фазовую частотные характерис-j тики прибора А((о) и Y(joy (см.фиг.З),
|можно сделать следующие выводы:
J . 1. Реакция прибора на постсанные|
ускорение (0 О) равна нулю.
I 2. На низкочастотный дрейф (СО Я&0) прибор реагирует мало (А«1).|
3, В области частот, соответствуклцих i частотам вертикальной качки судов;
{со О,1 ), частотные характе ; ристихи прибора близки к частотным харак теристикам идеального интегрирующего звена, изображенным штриховыми линиями, , .т.е. скорость, вертикальной качки измеряieTCH достаточно точно. Предмет изобр е т е н и я Измеритель вертикальной скорости :качки, содержащий гироскопический маяо никовый акселерометр с датчиками углов и датчиками моментов как на внутревней, так и на оси наружной рамок, установлен,- ный на отабилизйрованное основание, отличающийся тем, что, с целью увеличенш точности, он снабжен отрицательной обратной связью от датчика угла на оси наружной рамки через сумматор к датчику момента иа оси внутренней рамки, причем выход датчика угла соединен с первым входом сумматора и через интегратс - со вторым входом сумматора.
фиг. 1
w
ml
W(fl
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2002 |
|
RU2225024C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2002 |
|
RU2224219C2 |
| БЕЗОПОРНОЕ УСТРОЙСТВО РАЗВОРОТА СКВАЖИННОГО ПРИБОРА | 2000 |
|
RU2184229C2 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО РАЗВОРОТА СКВАЖИННОГО ПРИБОРА | 2000 |
|
RU2184228C2 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |