Изобретение относится к сельскому хозяйству, в частности к системам автоматического управления устройствами обогрева воздуха теплиц, и может быть использовано в системах автоматического управления устройствами обогрева почвы теплиц.
Цель изобретения - повьшшние качества регулирования температуры и
15
25
экономия тепловой энергии на обогрев. tO структуры. ПИ регулирующий блок 6
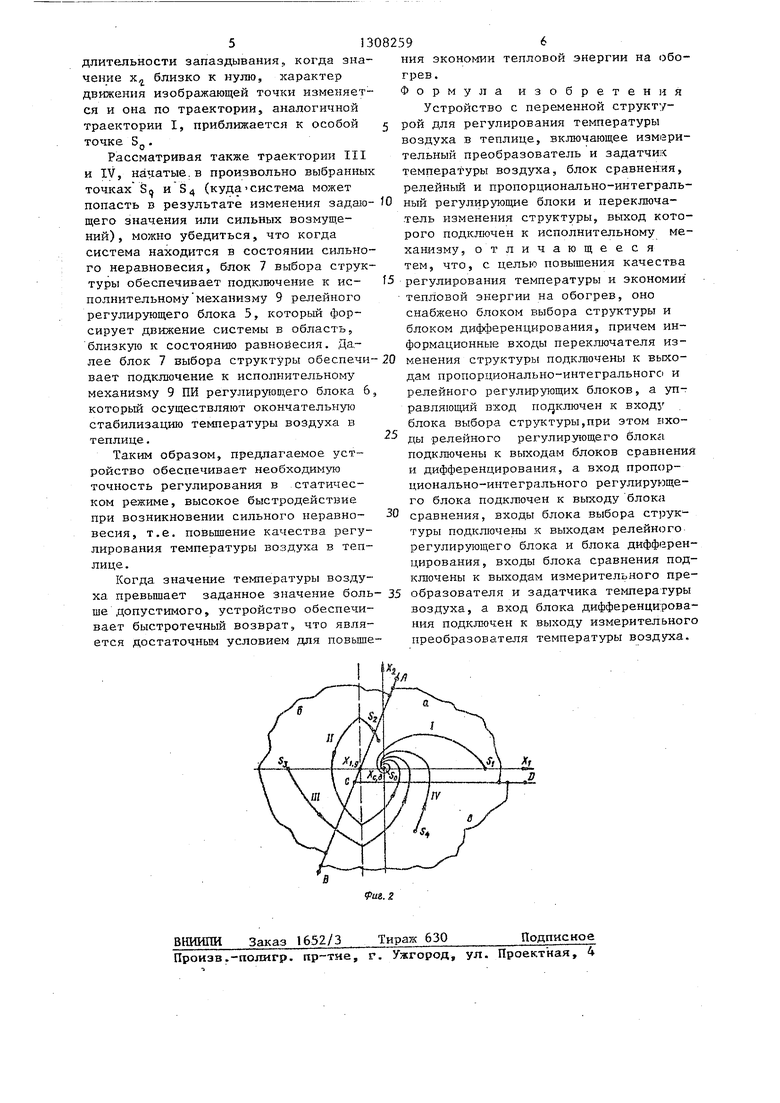
На фиг. 1 показана блок-схема уст- вырабатывает управляющее воздейст- ройства; на фиг. 2 - фазовые траектории системы автоматического регулирования с предлагаемым устройством на фазовой плоскости.
Устройство с переменной структурой для регулирования температуры воздуха в теплице содержргг измерительный преобразователь и задатчик
2температуры воздуха в теплице, блок 20 нием скорости изменения регулируе; юй
3сравнения, блок 4 дифференцирова- величины, умноженным на постоянну о ния, релейный 5 и пропорционально- интегральный (ПИ) 6 регулирующие блоки, блок 7 выбора структуры, а также
переключатель 8 изменения структуры, выход которого подключен к исполнительному механизму 9, причем информационные входы переключателя 8 изменения структуры подключены к выходам релейного 5 и ПИ 6 регулирующих - блоков, а управляющий вход подключен к выходу блока 7 выбора структуры, при этом входы релейного регулирующего блока 5 подключены к выходам блоков сравнения 3 и дифференцирования 4 , Вход, ПИ регулирующего блока б подключен к Выходу блока 3 сравнения.
входы блока 7 выбора стру стуры под- действия, а скорость изменения регу Q лируемой величины больше заранее данного отрицательного значения, выходной сигнал блока 7 выбора стру1;ту- ры имеет положительную полярность., при которой переключатель 8 изменв j ния структуры под.:лк1чает к входу исполнительного механизма 9 выход ПИ регулирующего блока 6, т.е. положс - ние исполнительного механизма 9 огсре- деляется управляюнщм воздействием,,
j-Q выработанным ПИ регулирующим блоком 6.
Если выходной сигнал релейного регулирующего блока 5 принимает макси- м;1льное значение управляющего воздей ствия или скорость изменения регутш- руемой величины становится меньше заданного отрицательного значения, то блок 7 выбора структуры изменяет лярность своего выходного сигнала с
вие по отклонению регулируемой ве,пи- чины соответственно заложенному в него закону регулирования.
Релейный регулирующий блок 5 вырабатывает управляющее воздействие в зависимости от следующих условий: если разность между значением отклонения регулируемой величины и значввеличину (устанав,пиваемую в завис, мости от значения, имеющегося в екте регулирования транспортного запаздывания; при отсутствии запаздывания эта величина равна нулю), меньше заранее заданного отрицательно: о значения, то выходной сигнал релейного регулиру1он.|;его блока 5 равен 30 минимальному значению управляющего воздействия, в противном случае B ji- ходной сигнал релейного регулирующего блока 5 равен максимальному значению управляющего воздействия.
351 „ „
Когда выходной сигнал релейного
регулирующего блока 5 равен максимальному значение управляющего возключены к выходам релейного регулирующего блока 5 и блока 4 дифференцирования, ,вход б.лока 3 сравнения подключен к выходам измерительного преобразователя 1 и задатчика 2 температуры воздуха в теплице, а вход блока 4 дифференцирования подключен к выходу измерительного преобразователя I Т€1мпературы воздуха.
Устройство работает следующим образом.
Заданное задатчиком 2 значение требуемой температуры воздуха сравнивается в блоке 3 сравнения с действительным значением температуры возду- ха в теплице, измеренным измерительным преобразователем 1. Выходной сигнал блока 3 сравнения пропорцнональ- ны,й отклонению регулируемой величины (разности между заданным и действительным значениями температуры воздуха в теплице), подается на входы релейного 5 и ПИ 6 регулирующих бпо- ков. Выходной сигнал блока 4 дифференцирования, пропорциональный скорости изменения регулируемой величины (температуры воздуха в теплице), подается на входы релейного регулирующего блока 5 и блока 7 выбора
вырабатывает управляющее воздейст-
вие по отклонению регулируемой ве,пи- чины соответственно заложенному в него закону регулирования.
Релейный регулирующий блок 5 вырабатывает управляющее воздействие в зависимости от следующих условий: если разность между значением отклонения регулируемой величины и значв5
величины, умноженным на постоянну о
действия, а скорость изменения регувеличину (устанав,пиваемую в завис, мости от значения, имеющегося в екте регулирования транспортного запаздывания; при отсутствии запаздывания эта величина равна нулю), меньше заранее заданного отрицательно: о значения, то выходной сигнал релейного регулиру1он.|;его блока 5 равен 0 минимальному значению управляющего воздействия, в противном случае B ji- ходной сигнал релейного регулирующего блока 5 равен максимальному значению управляющего воздействия.
351 „ „
Когда выходной сигнал релейного
регулирующего блока 5 равен максимальному значение управляющего воз
положительной на отрицательную, в связи с чем переключатель 8 изменения структуры переключает управление исполнительным механизмом 9 от ПИ регулируЛщего блока на релейный регу лирующий блок 5.
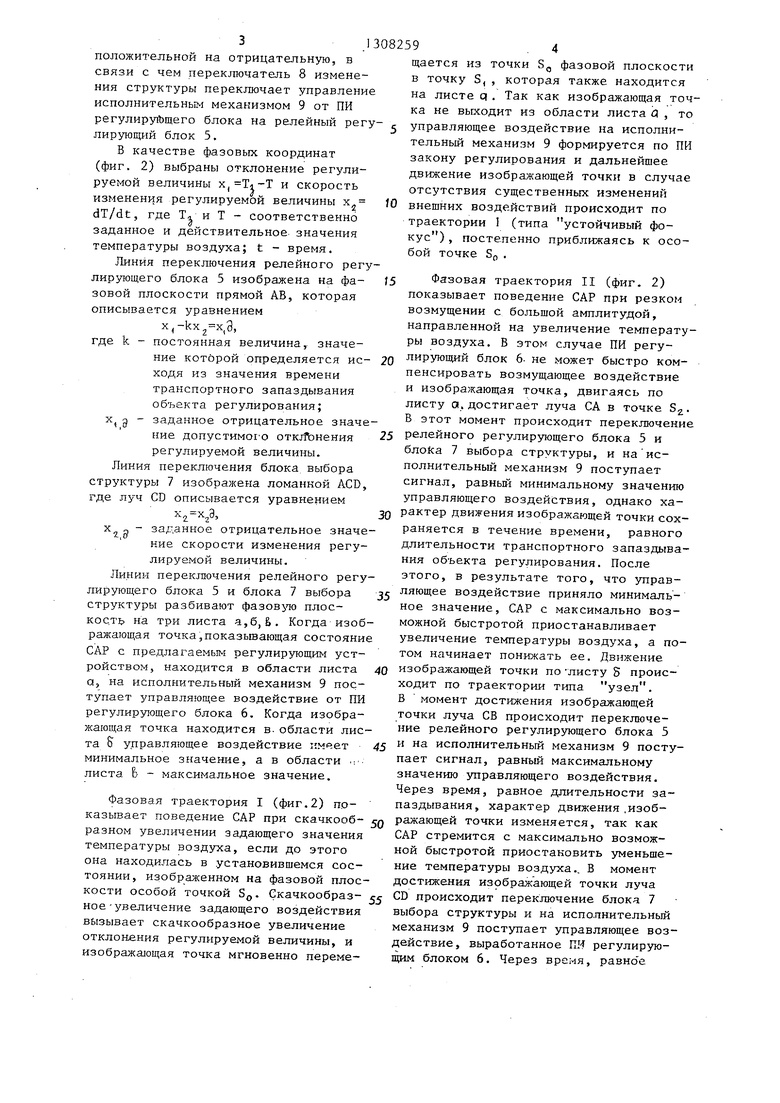
В качестве фазовых координат (фиг. 2) выбраны отклонение регулируемой величины X,TI-T и скорость изменения регулируемой величины yi dT/dt, где Та и Т - соответственно заданное и действительное значения температуры воздуха; t - время.
Линия переключения релейного регулирующего блока 5 изображена на фазовой плоскости прямой АВ, которая описывается уравнением
,
где k - постоянная величина, значение которой определяется исходя из значения времени транспортного запаздывания объекта регулирования; Xj g - заданное отрицательное значе Е1ие допустимого OTKjfbHeHHH регулируемой величины. Линия переключения блока, выбора структуры 7 изображена ломанной ACD, где луч CD описывается уравнением
2.г
X д - заданное отрицательное значение скорости изменения регулируемой величины.
Линии переключения релейного регулирующего блока 5 и блока 7 выбора структуры разбивают фазовую плос- кос.тъ на три листа а,б, &. Когда изображающая точкаэпоказьшающая состояни САР с предлагаемым регулирующим устройством, находится в области листа а, на исполнительный механизм 9 поступает управляющее воздействие от ПИ регулирующего блока 6. Когда изображающая точка находится в. области лис
та S управляющее воздействие имеет минимальное значение, а в области :- листа Ь - максимальное значение.
Фазовая траектория I (фиг.2) показывает поведение САР при скачкооб- 50ражающей точки изменяется, так как
разном увеличении задающего значенияСАР стремится с максимально возможтемпературы воздуха, если до этогоной быстротой приостановить уменьшеона находилась в установивщемся сое-ние температуры воздуха.. В момент
тоянии, изображенном на фазовой плос-достижения изображающей точки луча
кости особой точкой SQ. Скачкообраз- CD происходит переключение блока 7
ное-увеличение задающего воздействия вызывает скачкообразное увеличение отклонения регулируемой величины, и изображающая точка мгновенно перемевыбора структуры и на исполнительный механизм 9 поступает управляющее воздействие, выработанное ПИ регулирующим блоком 6. Через время, равно е
щается из точки Sg фазовой плоскости в точку S,, которая также находится на листе q. Так как изображающая точка не выходит из области листа Q , то управляющее воздействие на исполнительный механизм 9 формируется по ПИ закону регулирования и дальнейшее движение изображающей точки в случае отсутствия существенных изменений внешних воздействий происходит по траектории I (типа устойчивый фокус) , постепенно приближаясь к особой точке Sn.
5
5 0
0
5
5
Фазовая траектория II (фиг. 2) показывает поведение САР при резком возмущении с большой амплитудой, направленной на увеличение температуры воздуха. В этом случае ПИ регулирующий блок 6. не может быстро компенсировать возмущающее воздействие и изображающая точка, двигаясь по листу а. достигает луча СА в точке В этот момент происходит переключение релейного регулирующего блока 5 и блока 7 выбора структуры, и на исполнительный механизм 9 поступает сигнал, равный минимальному значению управляющего воздействия, однако ха- Q рактер движения изображающей точки сохраняется в течение времени, равного длительности транспортного запаздывания объекта регулирования. После этого, в результате того, что управляющее воздействие приняло минимальное значение, САР с максимально возможной быстротой приостанавливает увеличение температуры воздуха, а потом начинает понижать ее. Движение изображающей точки по листу S происходит по траектории типа узел. В момент достижения изображающей точки луча СВ происходит переключение релейного регулирующего блока 5 и на исполнительный механизм 9 поступает сигнал, равный максимальному значению управляющего воздействия. Через время, равное длительности запаздывания, характер движения,изобвыбора структуры и на исполнительный механизм 9 поступает управляющее воздействие, выработанное ПИ регулирующим блоком 6. Через время, равно е
длительности запаздывания., когда значение х близко к нулю, характер движения изображающей точки изменяется и она по траектории, аналогичной траектории I, приближается к особой точке SQ.
Рассматривая также траектории III и ly, начатые.в произвольно выбранных точках Sq и 84 (куда Система может попасть в результате изменения задаю- щего значения или сильных возмущений) , можно убедиться, что когда система находится в состоянии сильного неравновесия, блок 7 выбора структуры обеспечивает подключение к ис- полнителъному механизму 9 релейного регулирующего блока 5, который форсирует движение системы в область, близкую к состоянию равновесия. Далее блок 7 выбора структуры обеспечи- вает подключение к исполнительному механизму 9 ПИ регулирующего блока 6 который осуществляют окончательную стабилизацию температуры воздуха в теплице,
Таким образом, предлагаемое устройство обеспечивает необходимую точность регулирования в статическом режиме, высокое быстродействие при возникновении сильного неравно- весия, т.е. повьшение качества регулирования температуры воздуха в теплице.
Когда значение температуры воздуха превьшает заданное значение боль ше допустимого, устройство обеспечивает быстротечный возврат, что является достаточным условием для повьше
O 5 0
0
35
5
ния экономии тепловой энергии на обогрев . Формула изобретен i-i я
Устройство с переменной структурой для регулирования температуры воздуха в теплице, включающее измерительный преобразователь и задатчик температуры воздуха, блок сравнения, релейный и пропорционально-интегральный регулирующие блоки и переключатель изменения структуры, выход которого подключен к исполнительному механизму, отличающееся тем, что, с целью повышения качества регулирования температуры и экономии тепловой энергии на обогрев, оно снабжено блоком выбора структуры и блоком дифференцирования, причем информационные входы переключателя изменения структурь подключены к выходам пропорционально-интегральногс и релейного регулирующих блоков, а управляющий вход подключен к входу блока выбора структуры,при этом входы релейного регулирующего блокг подключены к выходам блоков сравнения и дифференцирования, а вход пропорционально-интегрального регулирующего блока подключен к выходу блока сравнения, входы блока выбора структуры подключены к выходам релейного регулирующего блока и блока дифференцирования , входы блока сравнения подключены к выходам измерительного преобразователя и задатчика температуры воздуха, а вход блока дифференцирования подключен к выходу измерительного преобразователя температуры воздуха.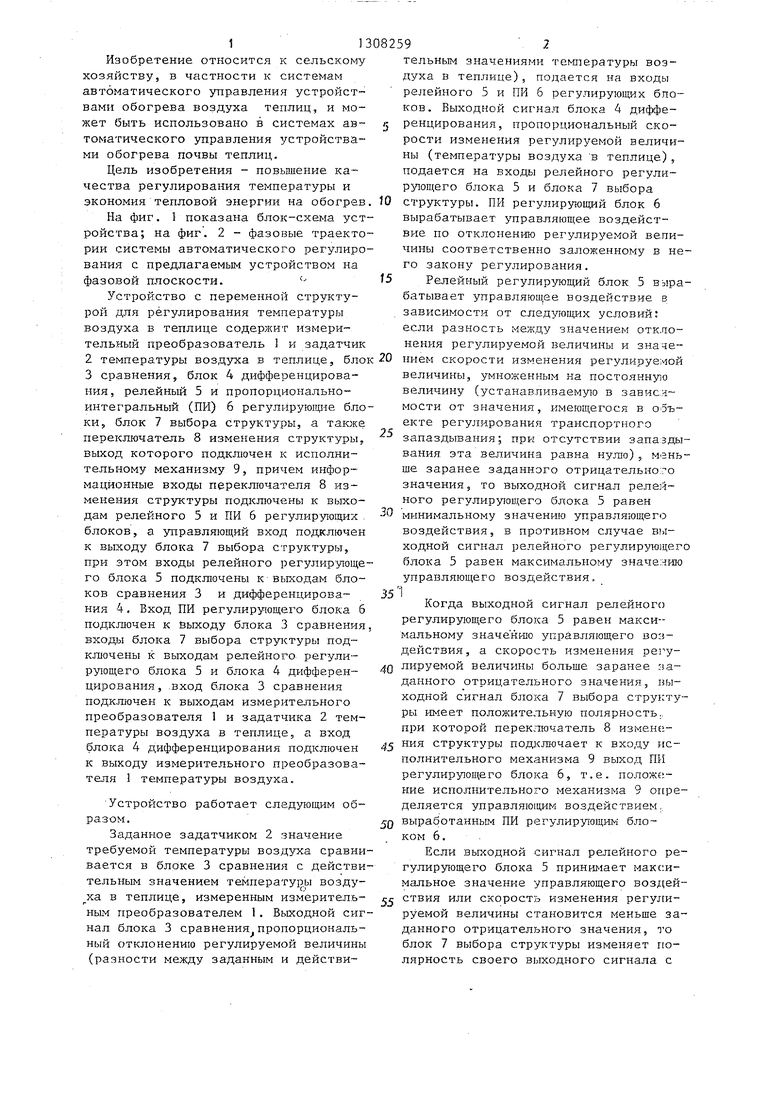
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство с переменной структурой для регулирования температуры и влажности воздуха в теплицах | 1987 |
|
SU1450789A1 |
| Трехпозиционный регулятор | 1984 |
|
SU1259208A1 |
| Устройство для регулирования температуры пара | 1983 |
|
SU1129459A1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Система автоматического управления периодическим процессом ферментации | 1989 |
|
SU1666538A1 |
| Позиционный регулятор | 1985 |
|
SU1303992A1 |
| Система для управления периодическим процессом ферментации | 1989 |
|
SU1725203A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2006 |
|
RU2311568C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| Позиционный регулятор для систем с запаздыванием | 1986 |
|
SU1416934A1 |
Изобретение относится к сельскому хозяйству. Цель изобретения - повышение качества регулирования температуры и экономия тепловой энергии на обогрев. Устройство содержит измерительный преобразователь 1 и задат- чик 2 температуры воздуха в теплице, блок 3 сравнения, блок 4 дифференцирования. Регулирующие блоки выполнены релейными 5 и пропорционально-интегральными 6. Устройство включает блок 7выбора структуры и переключатель 8 изменения структуры. Переключатель 8изменения структуры подключает к входу исполнительного механизма 9 выходы релейного 5 или гропорциональ- но-интегрального 6 регулирующих блоков в зависимости от отклонения и скорости изменения регулируемой величины. Устройство обеспечивает необходимую точность регулирования в статическом режиме и высокое быстродействие при возникновении сильного неравновесия. Когда значение температуры воздуха превышает заданное значение больше допустимого устройство обеспечивает быстротечный возврат. 2 ил. S (Л 00 ГС ел |) Фиг. 1
ВНИИПИ Заказ 1652/3 Тира/к 630Подписное
Проиэв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
1
| Умножитель чисел, заданных в двоичной системе | 1948 |
|
SU86341A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
