Изобретение относится к машиностроению и может быть использовано в робототехнических устройствах.
Цель изобретения - повышение избирательности информации очувствления и расширение функциональных возможностей.
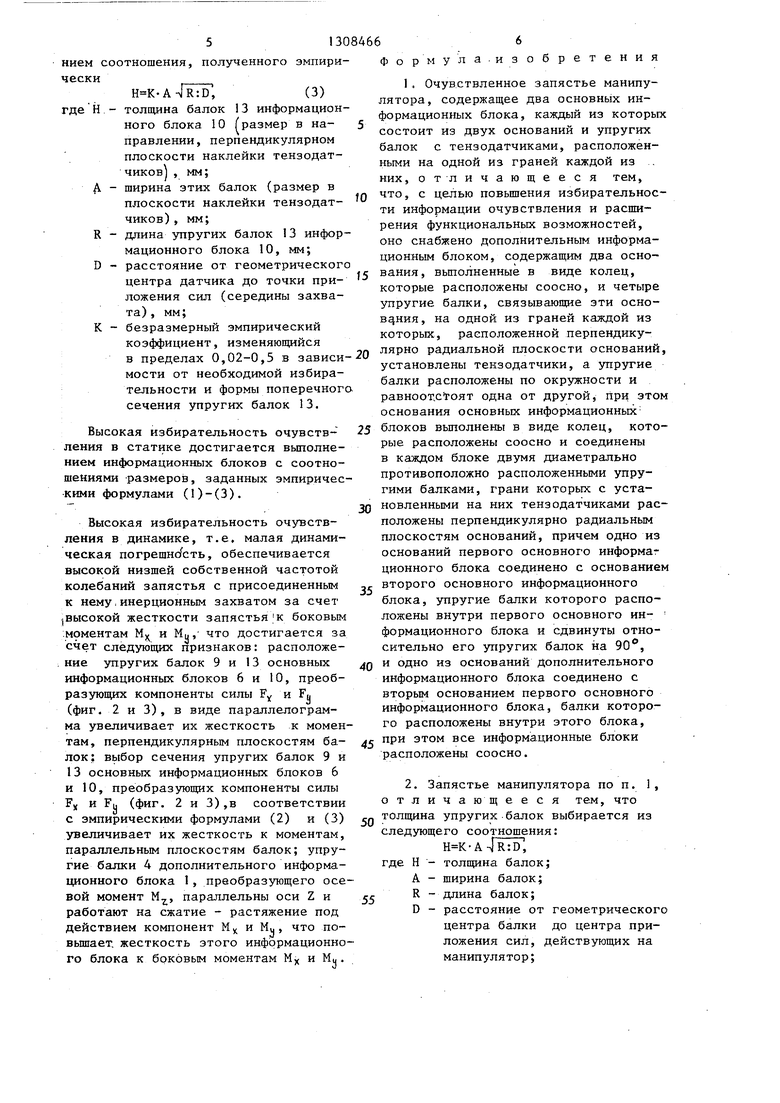
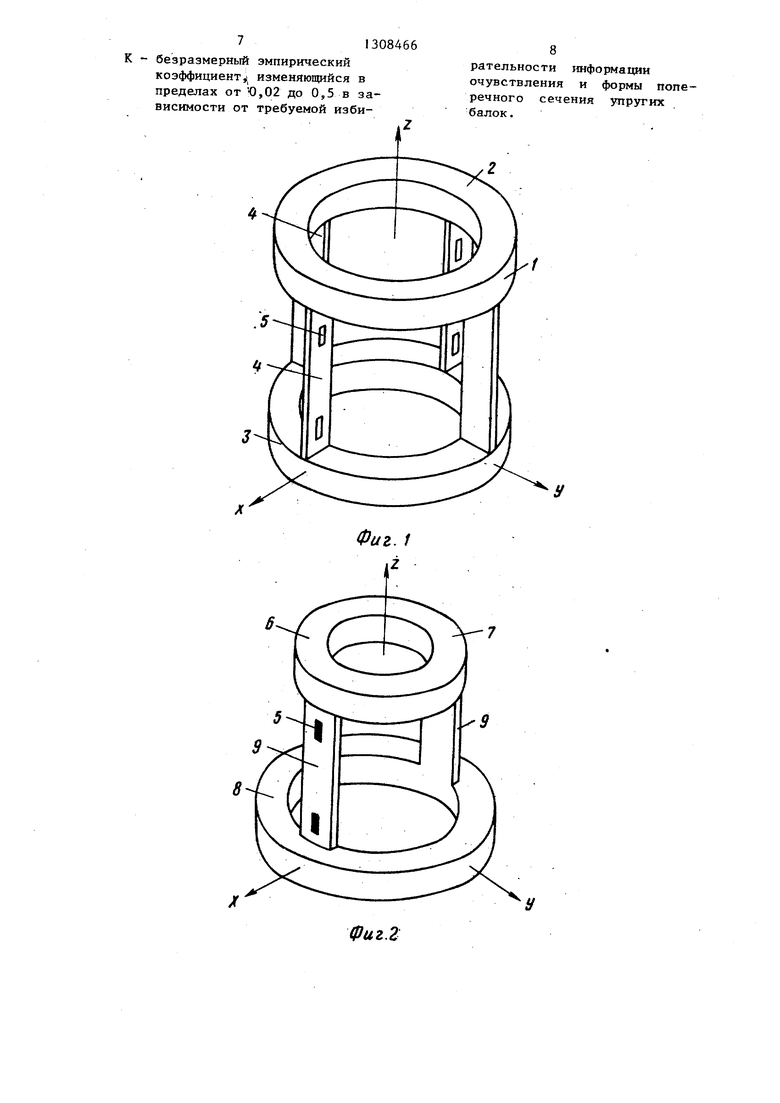
На фиг. 1 изображен информационный блок для измерения осевого момента, действующего вдоль оси Z (дополнительный информационный блок); на фиг. 2 - информационный блок для измерения боковой силы, действующей вдоль оси X (первый основной информационный блок); на фиг, 3 - информационный блок для измерения боковой силы, действующей вдоль оси Y (второй основной информационньш блок); на фиг. 4 - очувствленное запястье, общий вид,
Информационньй блок для измере- ния осевого момента, действующего вдоль оси Z (фиг. 1), состоит из первого 2 и второго 3 жестких соосных кольцевых оснований одинакового диаметра, соединенных четырьмя равноотстоящими упругими балками 4 и тензо- датчиками 5 (тензорезисторами). Оси балок 4 перпендикулярны плоскостям оснований 2 и 3 и параллельны оси Z. Информационный блок 6 для измерения боковой силы, действующей вдоль оси X (фиг. 2), состоит из первого 7 и второго 8 жестких соосных кольцевых оснований, соединенных двумя параллельными упругими балками 9 с тен зодатчиками 5. Оси балок 9, перпендикулярные плоскостям рсновапий 7 и 8, лежат в диаметральной плоскости OXZ.
Информационный блок 10 для измерения боковой силы, действующей вдол оси Y (фиг, 3), состоит из первого 11 и второго 12 жестких соосных кольцевых оснований, соединенных двумя параллельными упругими балками 13. с тензорезисторами 5. Оси балок 13, перпендикулярные плоскостям оснований 11 и 12, лежат в диаметральной плоскости OYZ.
Для одновременного преобразования компонент силы по осям X и Y и компоненты момента по оси Z конструкция очувствленного запястья содержит информационные блоки 1,6 и 10 (фиг. 4), При этом второе кольцевое основание 3 информационного блока Г, измеряющего осевой момент М, жестко соединено с вторым кольцевым
3084662
основанием 8 информационного блока
5
0
5
0
6, измеряющего боковую силу F , так, что упругие балки 9 информационного блока 6 находятся внутри информационного блока 1, Первое кольцевое основание 7 информационного блока 6, измеряющего боковую силу ГУ, жестко соединено с первым кольцевым основанием 11 информационного блока 10, измеряющего боковую силу Гц, так, что упругие балки 13 информационного блока 10 находятся внутри информационного блока 6.
Все информационные блоки включены в силовую цепь последовательно, поэтому между п€;рвым и вторым основаниями каждого информационного блока действуют все шесть компонент силы и момента, приложенных к запястью.
Информационный блок для измерения осевого момента вдоль Z (фиг. I) работает следующим образом.
Преобразуемая компонента момента М„ изгибает балки 4 в тангенциальном направлении, деформации балок 4 посредством тензодатчиков 5, размещенных у заделок балок 4 в кольцевые основания 2 и 3, преобразуются в электрический сигнал. При этом в схеме моста, в который включены тензо- датчики, сигналы от М суммируются.
При действии неизмеряемых компо- и компоненты
нент момента М и Мм балки 4
силы Г
испытывают деформа35 ции сжатия или растяжения. При этом уровни возниксцощих паразитных деформаций существенно меньше, чем при действии преобразуемого момента М, кроме того, в схеме моста соответ40 ствующие сигналы вычитаются, что до- . полнительно уменьшает погрешность от неизмеряемых компонент Г , М ч При действии неизмеряемых компонент силы Г и FU балки 4 испытываю
45 изгиб в направлении наибольшей жесткости. При этом уровни возникающих паразитных деформаций тензодатчиков существенно меньше, чем при действии преобразуемого момента М,, поэто50 му погрешность от неизмеряемых компонент Fy: И Гц невелика.
Высокая избирательность в статике (отношение сигнала от измеряемой 55 компоненты к сигналу неизмеряемой компоненты) обеспечивается выполнением соотношения, полученного эмпирически
Н К-АтГк75, (1)
313
где Н - толщина балок 4 информационного блока 1 (размер в направлении, перпендикулярном плоскости наклейки тензодат- чиков), мм; .
А - ширина этих балок (размер в плоскости наклейки тензо- датчиков), мм;
R - средний радиус кольцевых оснований 2 и 3 первого инфор- мационного блока 1, мм; D - расстояние от геометрического центра датчика до точки приложения Сил (середины захвата) , мм; К - безразмерный эмпирический коэффициент, изменяющийся в пределах 0,02-0,5 в зависимости от необходимой избирательности и формы поперечного сечения упругих балок 4. Информационный блок 6 для измерения боковой силы вдоль оси X (фиг.2) работает следующим образом.
Преобразуемая компонента силы F изгибает балки 9, деформации балок 9 посредством тензодатчиков 5, размещенных у заделок балок 9 в кольцевые основания 7, преобразуются в электрический сигнал. При этом в схеме моста, в который включены тензодатчи- ки, сигналы от FX суммируются.
При действии неизмеряемой, компоненты момента Мп и компоненты силы Е. балки 9 испытывают деформации ежа- тин или растяжения, поэтому уровни возникающих паразитных деформаций существенно меньше, в схеме моста соответствующие сигналы вычитаются, что дополнительно уменьшает погрешность от неизмеряемых компонент F и М.
При действии неизмеряемой компоненты силы Ец и компоненты момента М балки 9 .испытывают изгиб в на- правлении наибольшей жесткости, поэтому уровни возникающих паразитных деформаций тензодатчиков существенно меньше, чем при действии преобразуе- ,мой компоненты силы F , и погреш- ность от неизмеряемых компонент F, и М невелика.
Высокая избирательность в статике (отношение сигнала от измеряемой компоненты к сигналу от неизмеряемых компонент) обеспечивается выполнением соотношения, полученного эмпирически .-D ,(2)
664
где Н - толщина балок 9 информационного блока 6 (размер в направлении, перпендикулярном плоскости наклейки тензодатчиков, мм;
А - ширина этих балок (размер в плоскости наклейки тензодатчиков) , мм;
R - длина упругих балок 9 второго информационного блока 6, мм;
D - расстояние от геометрическог центра датчика до точки приложения сил (середины захва- та), мм;
К - безразмерный эмпирический коэффициент, изменяющийся в пределах 0,02-0,5 в зависимости от необходимой избирательности и формы поперечного сечения упругих балок 9. Информационный блок 10 для измерения боковой силы вдоль оси Y (фиг. 3) работает следующим образом.
Преобразуемая компонента силы F,. изгибает балки 13, деформации балок 13 посредством тензорезисторов 5, размещенных у заделок балок 13 в кольцевые основания II и 12, преобразуются в электрический сигнал. При этом в схеме моста, в который включены тензорезисторы, сигналы от F суммируются.
При действии неизмеряемой компоненты момента М,, и компоненты силы F. балки 13 испытывают деформации сжатия или растяжения, поэтому уровн возникающих паразитных деформаций существенно меньше, чем при действии преобразуемой силы F , кроме того, в схеме моста соответствующие сигналы вычитаются, что дополнительно уменьшает погрешность от неизмеряемых компонент М., и F .
Л л,,
При действии неизмеряемой компоненты силы F и компоненты момента Mj, балки 13 испытывают изгиб в направлении наибольшей жесткости, поэтому уровни возникающих паразитных деформаций тензодатчиков cjmiecTBeH- но меньше чем при действии преобра- зуемой компоненты силы , и погрешность от неизмеряемых компонент F и Mj невелика.
Высокая избирательность в статике (отношение сигнала от измеряемой компоненты к сигналу от неизмеряемых компонент), обеспечивается вьтолнетношения, полученного эмпири
H K-A-I IF,(3)
толщина балок 13 информационного блока 10 /размер в направлении, перпендикулярном плоскости наклейки тензодат- чиков, мм;
ширина этих балок (размер в плоскости наклейки тензодат- чиков), мм;
длина упругих балок 13 информационного блока 10, мм;
D - расстояние от геометрического центра датчика до точки при- ложения сил (середины захвата), мм;
К - безразмерный эмпирический коэффициент, изменяющийся в пределах 0,02-0,5 в зависи-20 мости от необходимой избирательности и формы поперечного сечения упругих балок 13.
Высокая избирательность очувств- 25 Ленин в статике достигается выполнением информационных блоков с соотношениями размеров, заданных эмпирическими формулами (1)-(3).
30
Высокая избирательность очувствления в динамике, т.е. малая динамическая погрешнс сть, обеспечивается высокой низшей собственной частотой колебаний запястья с присоединенным ,г к нему,инерционным захватом за счет
Высокой жесткости запястья к боковым мрментам М; и Ми, что достигается за счет следующих признаков: расположение упругих балок 9 и 13 основных Q информационных блоков 6 и 10, преобразующих компоненты силы Fy и Гц (фиг. 2 и 3), в виде параллелограмма увеличивает их жесткость к моментам, перпендикулярным плоскостям ба- 45 лок: выбор сечения упругих балок 9 и 13 основных информационных блоков 6 и 10, преобразующих компоненты силы FX и FU (фиг, 2 и 3),в соответствии с эмпирическими формулами (2) и (3) 50 увеличивает их жесткость к моментам, параллельным плоскостям балок; упругие балки 4 дополнительного информационного блока 1, преобразующего осевой момент М, параллельны оси Z и 55 работают на сжатие - растяжение под действием компонент Н и Ми, что по- вьш1ает, жесткость этого инф|эрмационно- го блока к боковым моментам М и Ми.
JQ
0
5
0
г
Q 5 0 5
qjopM у л а.изобретения
1.Очувствленное запястье манипулятора, содержащее два основных информационных блока, каждый из которых состоит из двух оснований и упругих балок с тензодатчиками, расположенными на одной из граней каждой из них, отличающееся тем,
что, с целью повышения избирательности информации очувствления и расширения функциональных возможностей, оно снабжено дополнительным информационным блоком, содержащим два основания, вьшолненные в виде колец, которые расположены соосно, и четыре упругие балки, связывающие эти осно- , на одной из граней каждой из которых, расположенной перпендикулярно радиальной плоскости оснований, установлены текзодатчики, а упругие балки расположены по окружности и равноот.с тоят одна от другой, при этом основания основных информационных блоков выполнены в виде колец, которые расположены соосно и соединены в каждом блоке двумя диаметрально противоположно расположенными упругими балками, грани которых с установленными на них тензодатчиками расположены перпевдикулярно радиальным плоскостям оснований, причем одно из оснований первого основного информаг ционного блока соединено с основанием второго основного информационного блока, упругие балки которого расположены внутри первого основного ин- формационного блока и сдвинуты относительно его упругих балок на 90, и одно из оснований дополнительного информационного блока соединено с вторым основанием первого основного информационного блока, балки которого расположены внутри этого блока, при этом все информационные блоки расположены соосно.
2.Запястье манипулятора по п. 1, отличающееся тем, что толщина упругих балок выбирается из следующего соотношения:
Н К-А4к:В; где Н - толщина балок;
А - ширина балок;
R - длина балок;
D - расстояние от геометрического центра балки до центра приложения сил, действующих на манипулятор;
71308466
безразмерный эмпирический коэффициент изменяющийся в пределах от Ю,02 до 0,5 в зависимости от требуемой изби8
рательности 1шформации очувствления и формы поперечного сечения упругих балок.
Фиг.2
X у ,
д.
W
if
Фи 2.3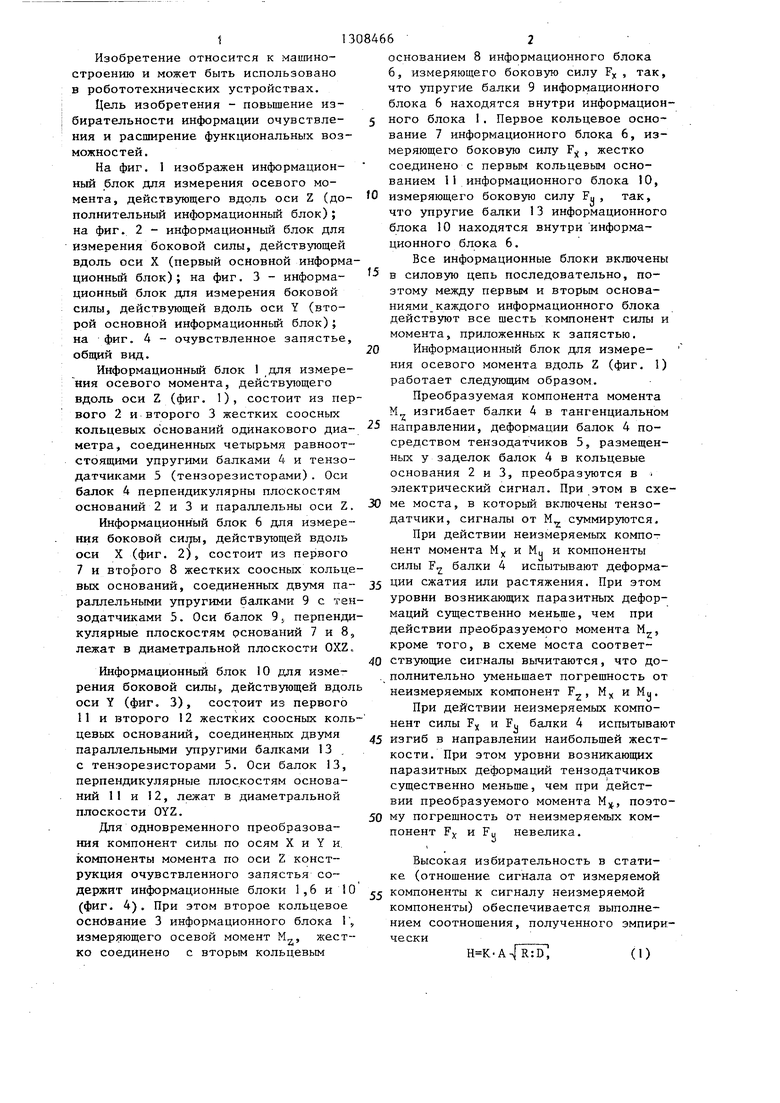

| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленное запястье манипулятора | 1984 |
|
SU1308467A1 |
| Очувствленное запястье манипулятора | 1984 |
|
SU1308468A1 |
| Устройство очувствления | 1986 |
|
SU1421535A1 |
| Очувствленный захват манипулятора | 1981 |
|
SU986775A1 |
| Очувствленное запястье руки робота | 1985 |
|
SU1355486A1 |
| Тензодинамометр продольного момента | 1986 |
|
SU1525500A1 |
| Очувствленный кистевой сустав робота | 1985 |
|
SU1569233A1 |
| Тензометрический динамометр продольной силы | 1990 |
|
SU1760395A1 |
| СИЛОИЗМЕРИТЕЛЬНЫЙ ДАТЧИК | 1972 |
|
SU353159A1 |
| Тензодинамометр продольной силы | 1980 |
|
SU935719A1 |
Изобретение относится к области машиностроения и может быть использовано в робототехнических устройствах. Цель изобретения - повьшгение избирательности информации очувствления и расширение функциональных возможностей. Три информационных блока I, 6 и 10, включенных в силовую цепь последовательно, посредством тензодатчиков 5, размещенных на упругих балках, преобразуют в электрический сигнал измеряемые величины: первую - осевой момент, вторую и третью - боковые силы. При этом тен- зодатчики 5 блока 1 расположены в радиальной плоскости. Высокая избирательность очувствления в статике (отношение сигнала от измеряемой си- ль1 к сигналу от неизмеряемых компонент) и в динамике (т.е. малая динамическая погрешность) достигаются выполнением информационных блоков . с соотношениями размеров, заданных эмпирическими формулами. 1 з.п. ф-лы, 4 ил. Z с S (Л Фиг.it
| Манипулятор | 1978 |
|
SU766854A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
