1
Изобретение относится к машиностроению и может быть использовано при очувствлении роботов и роботизированных комплексов, используемых на различных технологических операциях механообработки, сборки и складирования издeJ ий.
Цель изобретения - повьпиение производительности за счет увеличения степеней свободы относительного перемещения оснований.
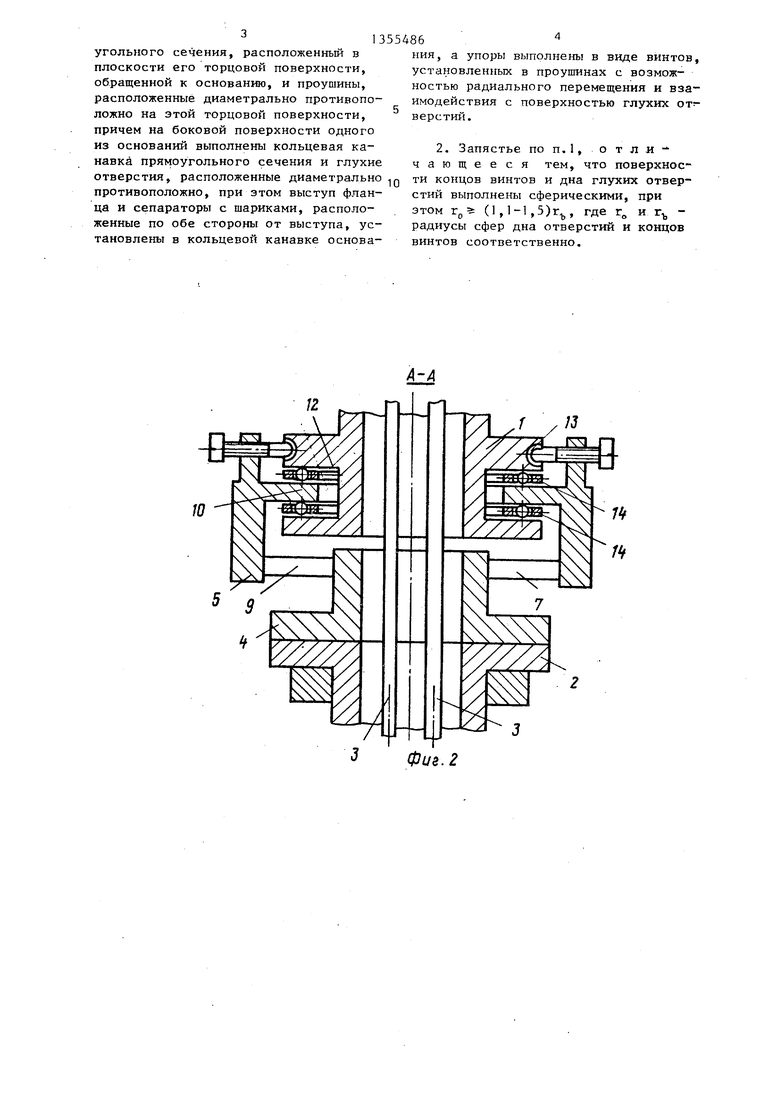
На фиг.1 изображено запястье, общий вид; на фиг.2 - сечение А-Л на фиг.1; на фиг.З - вид Б на фиг.1.
Рука робота содержит соосно расположенные основания 1 и 2 схвата и предплечья, магистрали 3 управления схватом, запястье, включающее внут
ренний 4 и наружньй 5 фланцы для сое- 20 при известной массе объекта манипудинения оснований 1 и 2 схвата и предплечья, и упругие балки 6-9 с тензодатчиками, механически связывающие фланцы 4 и 5 между собой (балка 8 не показана).
На одном из фланцев, например 5, запястья в плоскости торца выполнен кольцевой выступ 10 прямоугольного сечения и диаметрально расположенные на поверхности торца проущины 11, а на боковой поверхности основания 1, соединенного с фланцем 5, выполнены кольцевая канавка 12 прямоугольного сечения и глухие отверстия 3, расположенные диаметрально противоположно..
Кроме того, запястье снабжено двумя сепараторами 14 с шариками 15, расположенными по обе стороны от выступа 10 в канавке 12 основания ,1, и упорами, выполненными в виде винтов 16, установленных в проушинах 11 с возможностью регулировочного перемещения в радиальном направлении, и взаимодействия с поверхностью отверстий.
Выступ 10, канавка 12 и сепараторы 14 с шариками 15 образуют соединение в виде плоскоподвижной кинематической пары. Основание 1 выполняют составным и после сборки части основания 1 жестко скрепляют между собой.
Взаимодействующие поверхности дна глухих отверстий 13 и концов винтов 16 выполнены сферическими,при этом Г(, S (1, 1-1,5)г,, где г„ , г,, - радиусы сфер дна отверстий 13 и концов винтов 16 соответственно. Рекомендованное соотношение радиусов сфер определяет величину пассивной податливости 8, т.е.. подвижность основалирования и по текущей силомоментной информации определяют место положения объекта со схвагом относительно центра координат ZXY сустава, а сле- 25 довательно, осуществляют манипулирование схвата с объектом по заданной программе. Поскольку информация с ка налов вводится в УМБ, то функция манипулирования схватом осуществляется автоматически в соответствии с параметрами сил и моментов, действующих на сустав.
При неточностях позицирования схвата с объектом манипулирования с сопрягаемым объектом ошибка относительного положения объектов устраняется самопроизвольно вследствие нали чия подвижности основания 1 относительно фланца 5 в плоскости, перпендикулярной, оси схвата.
30
35
40
Формула изобретения
50
1. Очувствленное запястье руки ро- с бота, содержащее два фланца, внутрен ний и наружный. Один из которых связан с основанием предплечья, а другой - с основанием схвата, упругие балки с тензодатчиками, связывающие фланца, и упоры для ограничения свободных перемещений одного из оснований относительно фланцев запястья, о тличающе е ся тем, что, с целью повьш1ен1-1я производительности за счет обеспечения относительных пе ремещений оснований схвата и предплечья, он снабжен двумя сепараторами с шариками, а на одном из фланцев выполнены кольцевой выступ прямо
55
6 ния
1 относительно фланца 5, в плоскости, перпендикулярной оси схвата.
YcTpovfcTBO работает следующим образом.
При захвате объекта манипулирования схяатом, например, по запрограммированной команде от УВМ (не показано) на вьгходах соответствующих измерительных каналов в зависимости от места положения объекта со схватом относительно центра координат ZXY запястья появятся электрические сигналы, характеризующие наличие нагрузки
(силы или момента), ее величины (модуля) и направления (знака) действия. Так как каждый из каналов несет информацию о параметрах соответствующей компоненты силы или момента, то
лирования и по текущей силомоментной информации определяют место положения объекта со схвагом относительно центра координат ZXY сустава, а сле- довательно, осуществляют манипулирование схвата с объектом по заданной программе. Поскольку информация с каналов вводится в УМБ, то функция манипулирования схватом осуществляется автоматически в соответствии с параметрами сил и моментов, действующих на сустав.
При неточностях позицирования схвата с объектом манипулирования с сопрягаемым объектом ошибка относительного положения объектов устраняется самопроизвольно вследствие наличия подвижности основания 1 относительно фланца 5 в плоскости, перпендикулярной, оси схвата.
Формула изобретения
1. Очувствленное запястье руки ро- бота, содержащее два фланца, внутренний и наружный. Один из которых связан с основанием предплечья, а другой - с основанием схвата, упругие балки с тензодатчиками, связывающие . фланца, и упоры для ограничения свободных перемещений одного из оснований относительно фланцев запястья, о тличающе е ся тем, что, с целью повьш1ен1-1я производительности за счет обеспечения относительных перемещений оснований схвата и предплечья, он снабжен двумя сепараторами с шариками, а на одном из фланцев выполнены кольцевой выступ прямо
угольного сечения, расположенный в плоскости его торцовой поверхности, обращенной к основанию, и проушины, расположенные диаметрально противоположно на этой торцовой поверхности, причем на боковой поверхности одного из оснований выполнены кольцевая канавка прямоугольного сечения и глухие
отверстия, расположенные диаметрально дти концов винтов и дна глухих отверпротивоположно, при этом выступ флан-стий выполнены сферическими, при
ца и сепараторы с шариками, располо-этом г (1,1-1,5)г, где г„ и г женные по обе стороны от выступа, ус-радиусы сфер дна отверстий и концов
тановлены в кольцевой канавке основа-винтов соответственно.
355486
ния, а упоры выполнены в виде винтов, установленных в проушинах с возможностью радиального перемещения и взаимодействия с поверхностью глухих от верстий.
2. Запястье по п.1, о тли а ю щ е е с я тем, что поверхнос
| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленный кистевой сустав робота | 1985 |
|
SU1569233A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Силомоментный датчик | 1984 |
|
SU1242734A1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| Силомоментный датчик | 1984 |
|
SU1216680A1 |
| КОМПЛЕКС ДЛЯ ПРОВЕДЕНИЯ ТРАНСКРАНИАЛЬНОЙ МАГНИТНОЙ СТИМУЛЯЦИИ | 2023 |
|
RU2817476C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Многофункциональный робототехнический комплекс для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта в сооружении | 2021 |
|
RU2776474C1 |
| МИКРОСХВАТ С СИЛОВЫМ ОЧУВСТВЛЕНИЕМ | 2004 |
|
RU2261170C1 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |

Изобретение относится к машиностроению и может быть использовано при очувствлении роботов роботизированных комплексов, используемых на различных технологических операциях механообработки, сборки и складирования изделий. Целью изобретения является повышение производительности за счет увеличения степеней свободы относительного перемещения оснований охвата и предплечья в запястье. Соединение фланца 5 запястья с основанием I выполнено с использованием двух сепараторов с шариками, образующих в сочленении схвата с запястьем плоскоподвижную кинематическую пару, что позволяет самоцентрироваться сопрягаемым деталям, например при сборке, в заданных пределах ошибки позиционирования схвата робота, не обращаясь к управляющей вычислительной машине для выработки дополнительной команды на устранение этой ошибки. 1 з.п. ф-лы, 3 ил. (Л 00 ел ел 4 00 CD
2
.2
Вид В
11
Фие.З
редактор М.Петрова
Составитель Ф.Майоров Техред А.Кравчук
Заказ 5746/1в Тираж 952Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Л.Пилипенко
| Nevins I.L | |||
| Whithey D.E | |||
| Computer -Controlled Assembly | |||
| - Scientific American | |||
| V | |||
| Ручная тележка для грузов, превращаемая в сани | 1920 |
|
SU238A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
