Изобретение относится к машиностроению и может быть использовано при сило- моментном очувствлении роботов, роботизированных комплексов, на различных технологических операциях механообработки, сборки, складирования изделий.
Целью изобретения является повышение точности измерения.
На фиг. 1 показана рука манипулятора с встроенным кистевым суставом, общий
канального усилителя 37, предназначенного для усиления сигналов измерительных мостов до значения, пригодного для передачи его на расстояние и обработки. В качестве эле- j. ментов 38, которые предназначены для подстройки нуля мостовых схем, могут быть применены, например, многооборотные под- строечные резисторы, включенные в разрыв одной из вершин мостов.
На поверхностях пластин 10 и 11 упрутельный мост для определения Мг на фиг. 7 - измерительный мост для определения на фиг. 8 - измерительный мост для определения М, на фиг. 9 - измерительный мост для определения Fz.
вид; на фиг. 2 - кистевой сустав робота, Ю гих балок (фиг. 3) показано размещение общий вид; на фиг. 3 - расположение тензорезисторов 12-35, где сплошными ли- тензорезисторов на упругих пластинах; на ниями обозначены тензорезисторы, лежащие фиг. 4 - измерительный мост для опреде- на видимой стороне пластин, а пунктир- ления Fx , на фиг. 5 - измерительный мост ными линиями - тензорезисторы, лежащие для определения Fr; на фиг. 6 - измери- 15 на невидимой стороне пластин.
В измерительные мосты (фиг. 4 к 5) включены тензорезисторы 18, 20, 30, 31 и 15, 17, 27, 28 соответственно, преобразующие деформацию пластин 11 в электрические сигналы от сил Fx и Fr, действующих
Рука манипулятора содержит основания 20 вдоль продольных осей балок, направления 1 и 2 схвата 3 и предплечья 4, магистрали которых можно условно принять за оси 5 управления с приводами 6 перемещения X п У декартовой системы координат ZXY, схвата 3 и кистевой сустав 7, включаю- при этом тензорезисторы, лежащие на одно- щий соосно расположенное вдоль централь-именной стороне пластин 11 (фиг. 3), вклюной оси сустава внутренний и наружный 2с в противоположные плечи мостов фланцы 8 и 9, четыре упругие балки, состоящие из удлиненных пластин 10 и 1 I прямоугольного сечения, тензорезисторы 12-35, соединенные в шесть измерительных мостов электрическую плату 36 с шестиканальным усилителем 37 и шестью элементами 38 подстройки сигналов измерительных мостов Каждая из упругих балок выполнена в виде двух удлиненных пластин 10 и 11, последовательно соединенных между собой
(фиг. 4 и 5). В измерительные мосты (фиг. 7 и 8) включены тензорезисторы 12, 13. 24, 25 и 21, 23, 33, 34 соответственно, преобразующие деформацию пластин 10 в электрические сигналы от крутящих момен- 30 тов Л4у и Мх, действующих относительно осей Y и X, при этом тензорезисторы, лежащие на разноименных сторона;; пластин 10 (фиг. 3), включены в противоположные плечи мостов (фиг. 7 к вдоль продольной оси балки к ортогонально ориентированных одна к другой, причем 35 одна из пластин, например пластина 10, лежит в плоскости, перпендикулярной центральной оси сустава. Каждая из пластин 10 и 11 снабжена тремя тензорезисторами, из которых два находятся на одной стороне
пластин 10 и 11, а одни - на другой.
Упругие балки связывают фланцы 8 и 9 между собой, при этом соединение балок с внутренним фланцем 8 выполнено жестким, с наружным фланцем 9 - шарнирным в
40
В измерительные мосты (фиг. 6 и 9) включены тензорезисторы 14, 22, 26, 35 и 16, 19, 29, 32 соответственно, преобразующие деформацию пластин 10 и 11 в электрические сигналы от силы Ft и крутящего момента М&, действующих относительно центральной оси сустава (оси Z), при этом тензорезисторы включены в мосты по принципу, аналогичному приведенному для сил Fx и Fy и моментов MX и MY.
Таким образом, взаимно перпендикулярканального усилителя 37, предназначенного для усиления сигналов измерительных мостов до значения, пригодного для передачи его на расстояние и обработки. В качестве эле- ментов 38, которые предназначены для подстройки нуля мостовых схем, могут быть применены, например, многооборотные под- строечные резисторы, включенные в разрыв одной из вершин мостов.
На поверхностях пластин 10 и 11 упругих балок (фиг. 3) показано размещение тензорезисторов 12-35, где сплошными ли- ниями обозначены тензорезисторы, лежащие на видимой стороне пластин, а пунктир- ными линиями - тензорезисторы, лежащие на невидимой стороне пластин.
в противоположные плечи мостов
(фиг. 4 и 5). В измерительные мосты (фиг. 7 и 8) включены тензорезисторы 12, 13. 24, 25 и 21, 23, 33, 34 соответственно, преобразующие деформацию пластин 10 в электрические сигналы от крутящих момен- тов Л4у и Мх, действующих относительно осей Y и X, при этом тензорезисторы, лежащие на разноименных сторона;; пластин 10 (фиг. 3), включены в противоположные плечи мостов (фиг. 7 к
В измерительные мосты (фиг. 6 и 9) включены тензорезисторы 14, 22, 26, 35 и 16, 19, 29, 32 соответственно, преобразующие деформацию пластин 10 и 11 в электрические сигналы от силы Ft и крутящего момента М&, действующих относительно центральной оси сустава (оси Z), при этом тензорезисторы включены в мосты по принципу, аналогичному приведенному для сил Fx и Fy и моментов MX и MY.
Таким образом, взаимно перпендикуляр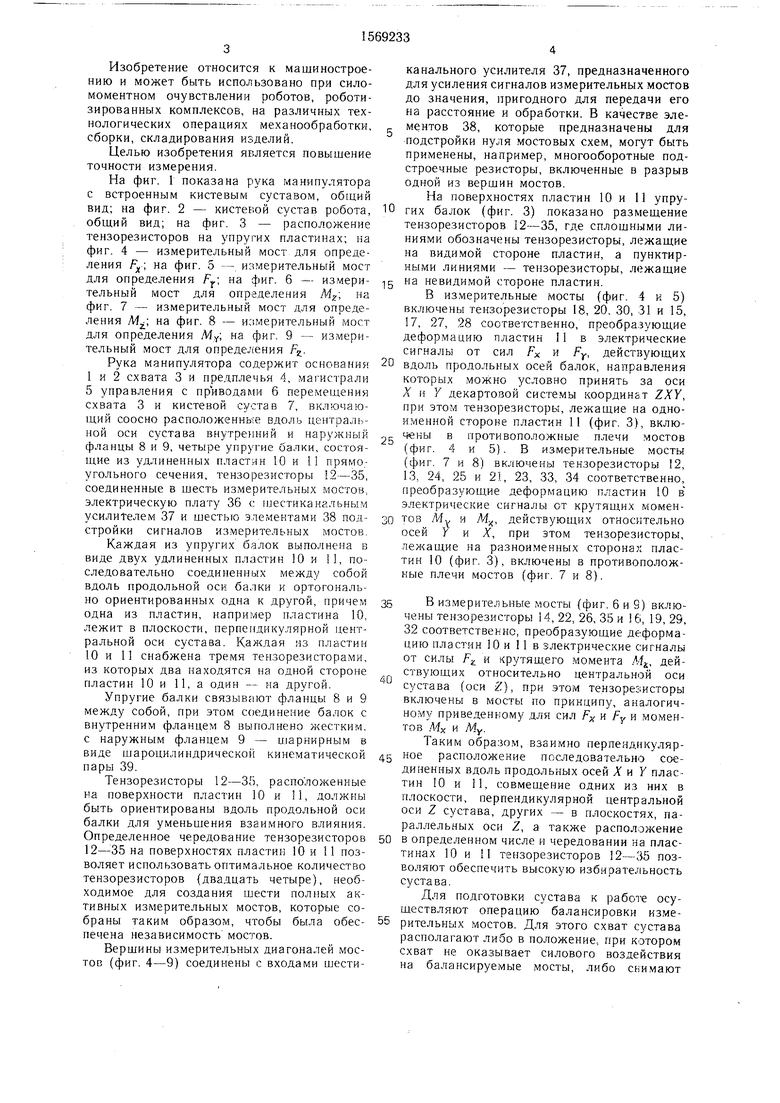

| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленный кистевой суставМАНипуляТОРА | 1979 |
|
SU795940A1 |
| Устройство очувствления | 1986 |
|
SU1421535A1 |
| ДАТЧИК ДЛЯ СИЛОМОМЕНТНОГО ОЧУВСТВЛЕНИЯ РОБОТОВ | 2006 |
|
RU2306536C1 |
| Очувствленный схват манипулятора | 1985 |
|
SU1309450A1 |
| Очувствленное запястье руки робота | 1985 |
|
SU1355486A1 |
| Очувствленный захват манипулятора | 1981 |
|
SU986775A1 |
| АДАПТИВНЫЙ МОБИЛЬНЫЙ ПРОСТРАНСТВЕННЫЙ РОБОТ-МАНИПУЛЯТОР ДЛЯ ПРОТЕЗИРОВАНИЯ ВЕРХНЕЙ КОНЕЧНОСТИ ПАЦИЕНТА И СПОСОБ ОБСЛУЖИВАНИЯ ПАЦИЕНТА ПОСРЕДСТВОМ АДАПТИВНОГО МОБИЛЬНОГО ПРОСТРАНСТВЕННОГО РОБОТА-МАНИПУЛЯТОРА | 2020 |
|
RU2738859C1 |
| Многокомпонентный динамометр | 1981 |
|
SU1015318A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1994 |
|
RU2126161C1 |
| Силомоментный датчик | 1984 |
|
SU1216680A1 |


Изобретение относится к машиностроению, в частности к средствам очувствления роботов. Целью изобретения является повышение точности измерения. Для этого фланцы 8 и 9 соединены упругими балками, выполненными в виде ортогонально расположенных пластин 10 и 11. Оси балок расположены в одной плоскости, перпендикулярной центральной оси сустава. Балки соединены с фланцем 8 жестко, а с фланцем 9 шарнирно. На каждой пластине закреплено по три тензорезистора: два с одной стороны, один с другой стороны пластины по ее оси симметрии. На одноименных сторонах пластин, расположенных в одной плоскости симметрично относительно центральной оси сустава, закреплено различное количество тензорезисторов. Пластины 10 расположены в плоскости, перпендикулярной центральной оси сустава. Для определения усилий и моментов используют измерительные мосты, в противоположные плечи которых включены тензорезисторы. Указанные тензорезисторы закреплены на пластинах, расположенных в одной плоскости симметрично относительно центральной оси сустава. Для определения моментов применены тензорезисторы, закрепленные на разноименных сторонах указанных пластин. Для определения усилий применены тензорезисторы, закрепленные на одноименных сторонах. 1 з.п.ф-лы, 9 ил.
виде шароцилиндрическои кинематической 45 ное расположение последовательно соепары 39.
Тензорезисторы 12-35, расположенные на поверхности пластин 10 и 11, должны быть ориентированы вдоль продольной оси балки для уменьшения взаимного влияния.
диненных вдоль продольных осей X и Y пластин 10 и 11, совмещение одних из них в плоскости, перпендикулярной центральной оси Z сустава, других - в плоскостях, параллельных оси Z, а также расположение
Определенное чередование тензорезисторов 50 в определенном числе и чередовании на пластинах 10 и 1 тгнзорезисторов 12-35 позволяют обеспечить высокую избирательность сустава.
Для подготовки сустава к работе осуществляют операцию балансировки измебраны таким образом, чтобы была обес- 55 рительных мостов. Для этого схват сустава
печена независимость мостов.располагают либо в положение, при котором
Вершины измерительных диагоналей мое-схват не оказывает силового воздействия
тов (фиг. 4-9) соединены с входами шести-на балансируемые мосты, либо снимают
12-35 на поверхностях пластин 10 и 11 позволяет использовать оптимальное количество тензорезисторов (двадцать четыре), необходимое для создания шести полных активных измерительных мостов, которые содиненных вдоль продольных осей X и Y пластин 10 и 11, совмещение одних из них в плоскости, перпендикулярной центральной оси Z сустава, других - в плоскостях, параллельных оси Z, а также расположение
в определенном числе и чередовании на пластинах 10 и 1 тгнзорезисторов 12-35 позволяют обеспечить высокую избирательность сустава.
схват с сустава на время балансировки мостов, подают напряжение питания на мосты и поочередно регулировкой элементов 38 балансируют мосты. Свидетельством сбалансированного состояния мостов является нулевое напряжение на вершинах измерительных диагоналей мостов, а следовательно, на выходах измерительных каналов. После операции балансировки мостов значения элементов 38 фиксируются.
гих балок, превышающей по величине порог чувствительности сустава.
Формула изобретения
Перед действием сустава напряжение питания подают через магистрали 5 управления на приводы 6 перемещения схвата 3
и усилитель 37. При отсутствии объекта 15 закреплены тензорезисторы, соединенные в
продольные оси которых расположены в одной плоскости, перпендикулярной центральной оси сустава, причем на балках
(детали) манипулирования в схвате 3 на выходах измерительных каналов в зависимости от местоположения схвата 3 относительно центра координат имеют место электрические сигналы, характеризующие нагрузэлектрические измерительные схемы, при этом упомянутые балки соединены с одним из фланцев жестко, а с другим - шарнирно, отличающийся тем, что, с целью повышения точности измерения, каждая из упруку (силу или момент), развиваемую схватом 20 гих балок выполнена в виде двух пластин,
3, ее величину (модуль) и направление
(знак) действия. Полученная силомоментная информация -о схвате 3 запоминается.
При захвате детали схватом 3, например,
последовательно соединенных между собой и ортогонально расположенных друг к другу, при этом одна из пластин расположена в плоскости, перпендикулярной центральной
по запрограммированной команде от управ- 25 оси сустава, причем на каждой пластине
ляющей вычислительной машины (не показано) на выходах соответствующих каналов в зависимости от местоположения схвата 3 с деталью относительно центра координат ZXY сустава появляются электризакреплены по три тензорезистора, один из которых расположен по оси симметрии пластины с одной ее стороны, а два других - параллельно первому тензорезистору и симметрично относительно него с другой сточеские сигналы, характеризующие суммарное 30 роны пластины, при этом на одноименных
действие схвата 3 с деталью. Так как каждый из шести измерительных каналов несет силомоментную информацию о параметрах соответствующих сил и моментов, развиваемых схватом как в отдельности, так и совсторонах пластин, расположенных в одной плоскости симметрично относительно центральной оси сустава, закреплено различное количество тензорезисторов.
ментной информации в отдельности о схвате 3 и в сумме с деталью определяют наличие детали в схвате 3 к возникающие усилия при достижении требуемого положения детали со схватом 3.
При манипулировании деталями, обладающими массой во много раз большей, чем масса схвата 3, вычислительную операцию по определению наличия детали или возникающих усилий в схвате 3 можно
40
измерения усилий включает в себя измерительные мосты, противоположные плечи которых содержат тензорезисторы, закрепленные на одноименных сторонах пластин, расположенных в одной плоскости симметрично относительно центральной оси сустава, а электрическая схема для измерения моментов включает в себя измерительные мосты, противоположные плечи которых содержат тензорезисторы, закреплен- упростить, если жесткость упругих балок 45 ные на разноименных стороных пластин, выбрать такой, чтобы масса схвата 3 не расположенных в одной плоскости симмет- вызывала механической деформации упру- рично относительно центральной оси сустава.
гих балок, превышающей по величине порог чувствительности сустава.
Формула изобретения
закреплены тензорезисторы, соединенные в
продольные оси которых расположены в одной плоскости, перпендикулярной центральной оси сустава, причем на балках
электрические измерительные схемы, при этом упомянутые балки соединены с одним из фланцев жестко, а с другим - шарнирно, отличающийся тем, что, с целью повышения точности измерения, каждая из упругих балок выполнена в виде двух пластин,
последовательно соединенных между собой и ортогонально расположенных друг к другу, при этом одна из пластин расположена в плоскости, перпендикулярной центральной
закреплены по три тензорезистора, один из которых расположен по оси симметрии пластины с одной ее стороны, а два других - параллельно первому тензорезистору и симметрично относительно него с другой стосторонах пластин, расположенных в одной плоскости симметрично относительно центральной оси сустава, закреплено различное количество тензорезисторов.
измерения усилий включает в себя измерительные мосты, противоположные плечи которых содержат тензорезисторы, закрепленные на одноименных сторонах пластин, расположенных в одной плоскости симметрично относительно центральной оси сустава, а электрическая схема для измерения моментов включает в себя измерительные мосты, противоположные плечи ко18
15
20
30
28
Фиг.Ц
23
21
73
34
2Lt
Фиг.7
л
19
16
27
Z9
ъг
Фиг. 5
Фаг. 6
12
26
V
25
35
Фиг. 8
Фаг.9
| Дистанционно управляемые роботы- манипуляторы | |||
| Сб | |||
| статей: Перев | |||
| с англ, и япон./Под ред | |||
| Е | |||
| П | |||
| Попова и М | |||
| Б | |||
| Игнатьева.- М.: Мир, 1976, с | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
