(54) МАНИПУЛЯТОР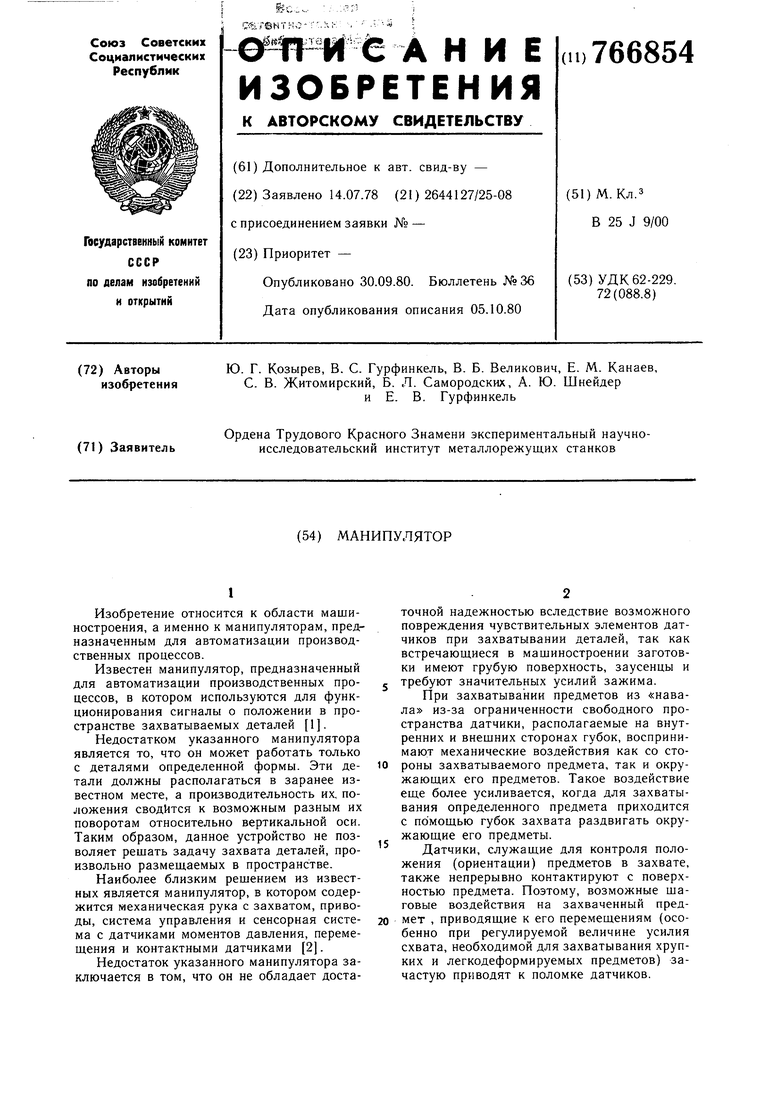
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный захват | 1979 |
|
SU918090A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Захватное устройство | 1985 |
|
SU1425084A1 |
| Устройство для передачи вибротактильной информации | 1975 |
|
SU543975A1 |
| Загрузочное устройство | 1988 |
|
SU1664508A1 |
| Устройство автоматической смены инструмента | 1981 |
|
SU1007907A1 |
| УСТРОЙСТВО ЗАХВАТА ДЕТАЛИ ДЛЯ АВТОМАТИЧЕСКОЙ СМЕНЫ ИНСТРУМЕНТАЛЬНОЙ ОСНАСТКИ | 2007 |
|
RU2365455C2 |
| ЗУБНАЯ ЩЕТКА С СИСТЕМОЙ ВЫБОРА НА ОСНОВЕ ПЕРЕМЕННОГО СЕНСОРНОГО ВОЗДЕЙСТВИЯ И СПОСОБ ЕЕ РАБОТЫ | 2014 |
|
RU2652325C1 |
| СПОСОБ И УСТРОЙСТВО ПАССИВНОГО УПРАВЛЕНИЯ | 2007 |
|
RU2377626C2 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
I
Изобретение относится к области машиностроения, а именно к манипуляторам,предназначенным для автоматизации производственных процессов.
Известен манипулятор, предназначенный для автоматизации производственных процессов, в котором используются для функционирования сигналы о положении в пространстве захватываемых деталей 1.
Недостатком указанного манипулятора является то, что он может работать только с деталями определенной формы. Эти детали должны располагаться в заранее известном месте, а производительность их. положения сводится к возможным разным их поворотам относительно вертикальной оси. Таким образом, данное устройство не позволяет решать задачу захвата деталей, произвольно размещаемых в пространстве.
Наиболее близким решением из известных является манипулятор, в котором содержится механическая рука с захватом, приводы, система управления и сенсорная система с датчиками моментов давления, перемещения и контактными датчиками 2.
Недостаток указанного манипулятора заключается в том, что он не обладает достаточной надежностью вследствие возможного повреждения чувствительных элементов датчиков при захватывании деталей, так как встречающиеся в машиностроении заготовки имеют грубую поверхность, заусенцы и , требуют значительных усилий зажима.
При захватывании предметов из «навала из-за ограниченности свободного пространства датчики, располагаемые на внутренних и внешних сторонах губок, воспринимают механические воздействия как со стороны захватываемого предмета, так и окружающих его предметов. Такое воздействие еще более усиливается, когда для захватывания определенного предмета приходится с помощью губок захвата раздвигать окружающие его предметы.
Датчики, служащие для контроля положения (ориентации) предметов в захвате, также непрерывно контактируют с поверхностью предмета. Поэтому, возможные щаговые воздействия на захваченный предмет , приводящие к его перемещениям (особенно при регулируемой величине усилия схвата, необходимой для захватывания хрупких и легкодеформируемых предметов) зачастую приводят к поломке датчиков.
Помимо этого в производственных процессах в ряде случаев требуется осуществлять смену захвата манипулятора и при этом сохранить функциональность манипулятора, обеспечив возможность анализа необходимой для этого информации, которая чаще всего для всех типов захватов может оставаться постоянной. Подобная задача известными устройствами рещается путем соответствующего очувствления всех сменных захватов. Однако это повыщает стоимость манипуляторов, увеличивает эксплуатационные затраты и ухудщает их надежность. Кроме того, датчики позволяют только определять форму локальной поверхности предмета, за которую он захвачен. Они не регистрируют возможные изменения положения заготовки относительно захвата при щаговом воздействии на него, приводящем к его перемещению, например повороту в плоскости, параллельной внутренним поверхностям губок захвата.
Целью изобретения является повышение надежности и расширение технологических возможностей манипулятора.
Указанная цель достигается тем, что механическая рука снабжена приводным штырем, смонтированным с возможностью продольного перемещения, датчиком положения и блоком управления штыря, а датчики сенсорной системы установлены на этом штыре, при этом контактные датчики и датчики моментов расположены на его боковых поверхностях, а датчики давления - на его торцовой поверхности, причем входы блока управления штыря соединены с датчиком его положения и системой управления, а выходы - с входом системы управления и приводом штыря.
Система управления снабжена блоком определения измененного положения объекта манипулирования, входы которого соединены с датчиками перемещения, давления и положения, а выходы - с соответствующим входом системы управления, при этом входы блока управления штыря соединены с датчиками давления и перемещения.
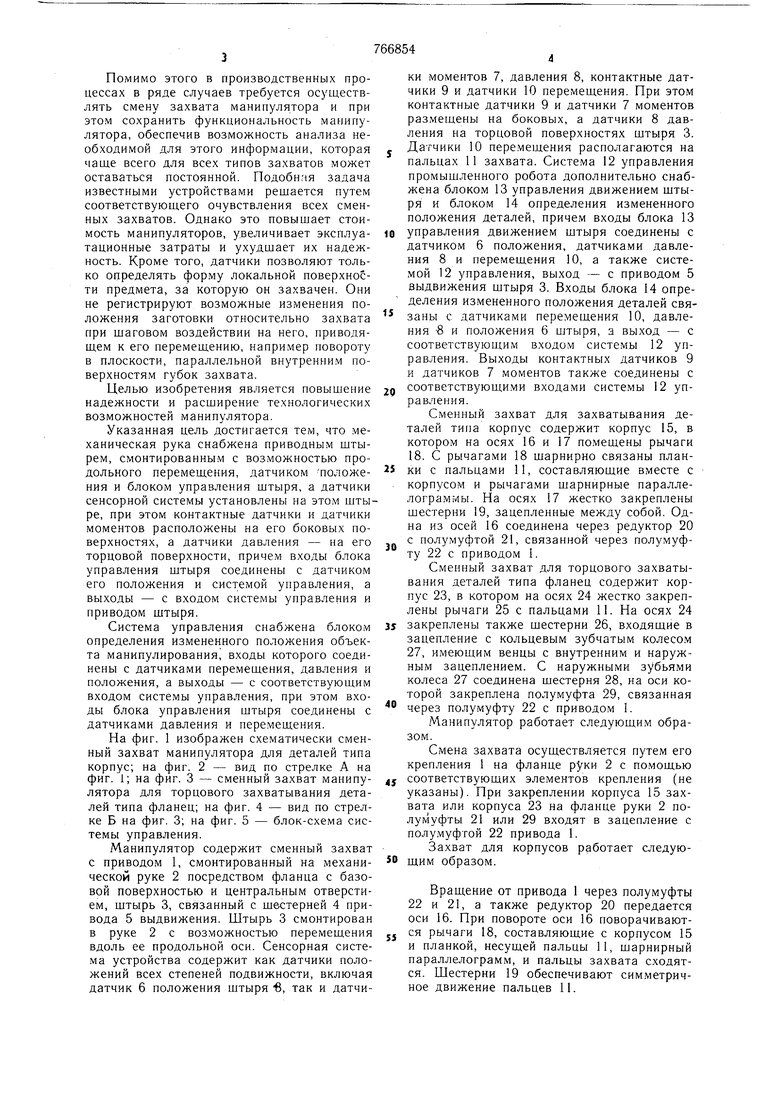
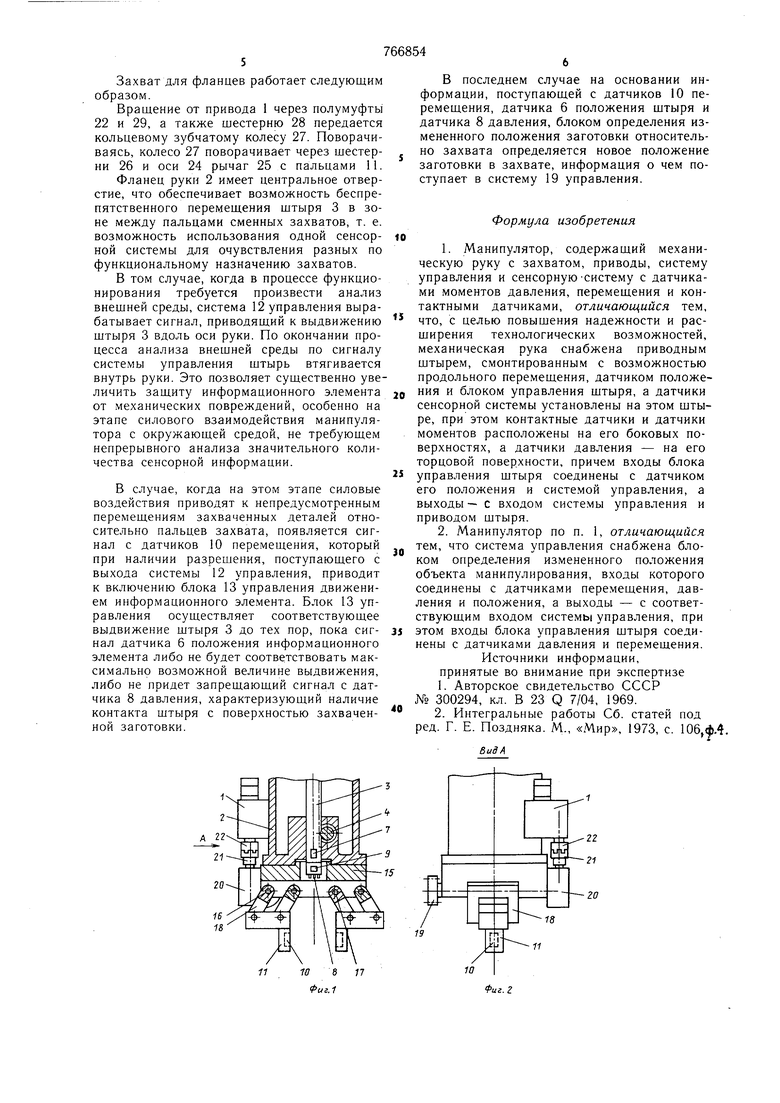
На фиг. 1 изображен схематически сменный захват манипулятора для деталей типа корпус; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - сменный захват манипулятора для торцового захватывания деталей типа фланец; на фиг. 4 - вид по стрелке Б на фиг. 3; на фиг. 5 - блок-схема системы управления.
Манипулятор содержит сменный захват с приводом 1, смонтированный на механической руке 2 посредством фланца с базовой поверхностью и центральным отверстием, щтырь 3, связанный с шестерней 4 привода 5 выдвижения. Штырь 3 смонтирован в руке 2 с возможностью перемещения вдоль ее продольной оси. Сенсорная система устройства содержит как датчики положений всех степеней подвижности, включая датчик 6 положения щтыря €, так и датчики моментов 7, давления 8, контактные датчики 9 и датчики 10 перемещения. При этом контактные датчики 9 и датчики 7 моментов размещены на боковых, а датчики 8 давления на торцовой поверхностях щтыря 3. Датчики 10 перемещения располагаются на пальцах 11 захвата. Система 12 управления промыщленного робота дополнительно снабжена блоком 13 управления движением штыря и блоком 14 определения измененного положения деталей, причем входы блока 13 0 управления движением щтыря соединены с датчиком 6 положения, датчиками давления 8 и перемещения 10, а также системой 12 управления, выход - с приводом 5 выдвижения щтыря 3. Входы блока 14 определения измененного положения деталей связаны с датчиками перемещения 10, давления 8 и положения 6 , а выход - с соответствующим входом системы 12 управления. Выходы контактных датчиков 9 и датчиков 7 моментов также соединены с q соответствующими входами системы 12 управления.
Сменный захват для захватывания деталей типа корпус содержит корпус 15, в котором на осях 16 и 17 помещены рычаги 18. С рычагами 18 шарнирно связаны планS ки с пальцами 11, составляющие вместе с корпусом и рычагами щарнирные параллелограммы. На осях 17 жестко закреплены шестерни 19, зацепленные между собой. Одна из осей 16 соединена через редуктор 20 с полумуфтой 21, связанной через полумуфту 22 с приводом 1.
Сменный захват для торцового захватывания деталей типа фланец содержит корпус 23, в котором на осях 24 жестко закреплены рычаги 25 с пальцами 11. На осях 24 5 закреплены также щестерни 26, входящие в зацепление с кольцевым зубчатым колесо.м 27, имеющим венцы с внутренним и наружны.м зацеплением. С наружными зубьями колеса 27 соединена шестерня 28, на оси которой закреплена полумуфта 29, связанная через полумуфту 22 с приводом I.
Манипулятор работает следующим образом.
Смена захвата осуществляется путем его крепления 1 на фланце руки 2 с помощью J соответствующих элементов крепления (не указаны). При закреплении корпуса 15 захвата или корпуса 23 на фланце руки 2 полумуфты 21 или 29 входят в зацепление с полу.муфтой 22 привода 1.
Захват для корпусов работает следуюo щим образом.
Вращение от привода 1 через полумуфты 22 и 21, а также редуктор 20 передается оси 16. При повороте оси 16 поворачиваютJ ся рычаги 18, составляющие с корпусом 15 и планкой, несущей пальцы 11, шарнирный параллелограмм, и пальцы захвата сходятся. Шестерни 19 обеспечивают сим.метричное движение пальцев 11.
Захват для фланцев работает следующим образом.
Вращение от привода 1 через полумуфты 22 и 29, а также шестерню 28 передается кольцевому зубчатому колесу 27. Поворачиваясь, колесо 27 поворачивает через шестерни 26 и оси 24 рычаг 25 с пальцами 11.
Фланец руки 2 имеет центральное отверстие, что обеспечивает возможность беспрепятственного перемещения штыря 3 в зоне между пальцами сменных захватов, т. е. возможность использования одной сенсорной системы для очувствления разных по функциональному назначению захватов.
В том случае, когда в процессе функционирования требуется произвести анализ внешней среды, система 12 управления вырабатывает сигнал, приводящий к выдвижению штыря 3 вдоль оси руки. По окончании процесса анализа внешней среды по сигналу системы управления штырь втягивается внутрь руки. Это позволяет существенно увеличить защиту информационного элемента от механических повреждений, особенно на этапе силового взаимодействия манипулятора с окружающей средой, не требующем непрерывного анализа значительного количества сенсорной информации.
В случае, когда на этом этапе силовые воздействия приводят к непредусмотренным перемещения.м захваченных деталей относительно пальцев захвата, появляется сигнал с датчиков 10 перемещения, который при наличии разрешения, поступающего с выхода системы 12 управления, приводит к включению блока 13 управления движением информационного элемента. Блок 13 управления осуществляет соответствующее выдвижение щтыря 3 до тех пор, пока сигнал датчика 6 положения информационного элемента либо не будет соответствовать максимально возможной величине выдвижения, либо не придет запрещающий сигнал с датчика 8 давления, характеризующий наличие контакта штыря с поверхностью захваченной заготовки.
В последнем случае на основании информации, поступающей с датчиков 10 перемещения, датчика 6 положения штыря и датчика 8 давления, блоком определения измененного положения заготовки относительно захвата определяется новое положение заготовки в захвате, информация о чем поступает в систему 19 управления.
Формула изобретения
принятые во внимание при экспертизе
8идА
