///У/ / / //// // // / / ////// Риг и
щего по соответствующей оси. Устройство закреплено между деталями 98 и 99 робота на его руке 92. Каждый информационный блок 95, 96, 97 выполнен цилиндрическим в виде четырех сегментов, расположенных попарно симметрично в двух параллельных плоскостях и соединенных упругими балками, плоскости которых параллельны
плоскостям упругих элементов с тензо- датчиками. При взаимодействии инструмента 94, зажатого в схвате 93, с обрабатываемой деталью 100 возникают усилия. Усилия преобразуются информационными блоками 95, 96, 97 в электрические сигналы, далее используемые в системе управления роботом. 1 з.п. ф-лы, 13 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленное запястье манипулятора | 1984 |
|
SU1308467A1 |
| Очувствленное запястье манипулятора | 1984 |
|
SU1308468A1 |
| Очувствленное запястье манипулятора | 1984 |
|
SU1308466A1 |
| Очувствленное запястье руки робота | 1985 |
|
SU1355486A1 |
| Очувствленный захват манипулятора | 1981 |
|
SU986775A1 |
| Очувствленный кистевой сустав робота | 1985 |
|
SU1569233A1 |
| ТЕНЗОПЛАТФОРМА ДЛЯ РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2715400C1 |
| ЭЛЕКТРОННЫЕ ТЕНЗОВЕСЫ | 1993 |
|
RU2044283C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ МАТЕРИАЛОВ НА ТРЕНИЕ И ИЗНОС | 2005 |
|
RU2279057C1 |
| Очувствленный схват робота | 1990 |
|
SU1815223A1 |

Изобретение относится к области машиностроения и может быть использовано в электротехнических устройствах. Целью изобретения является повышение надежности. Для этого информационные блоки 95,96, 97 закреплены между собой с возможностью восприятия каждым из них усилия, действую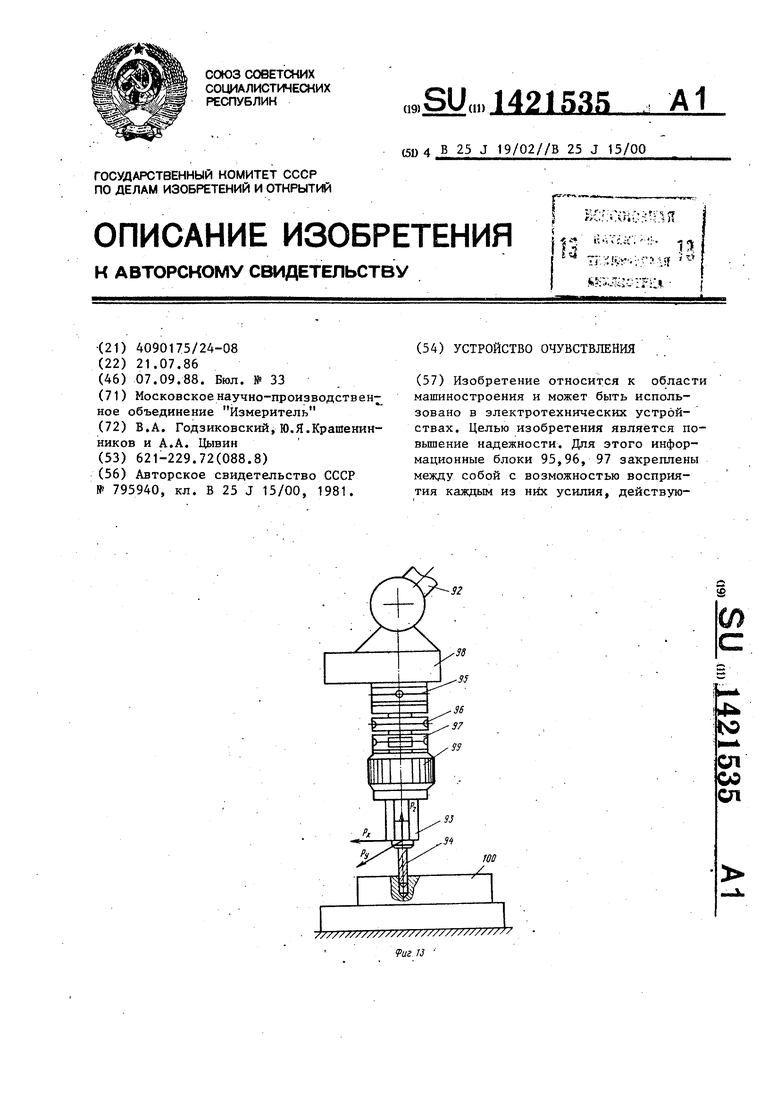
1
Изобретение относится к машиностроению и может быть использовано в робототехнических устройствах.
Цель изобретения - повышение надежности.
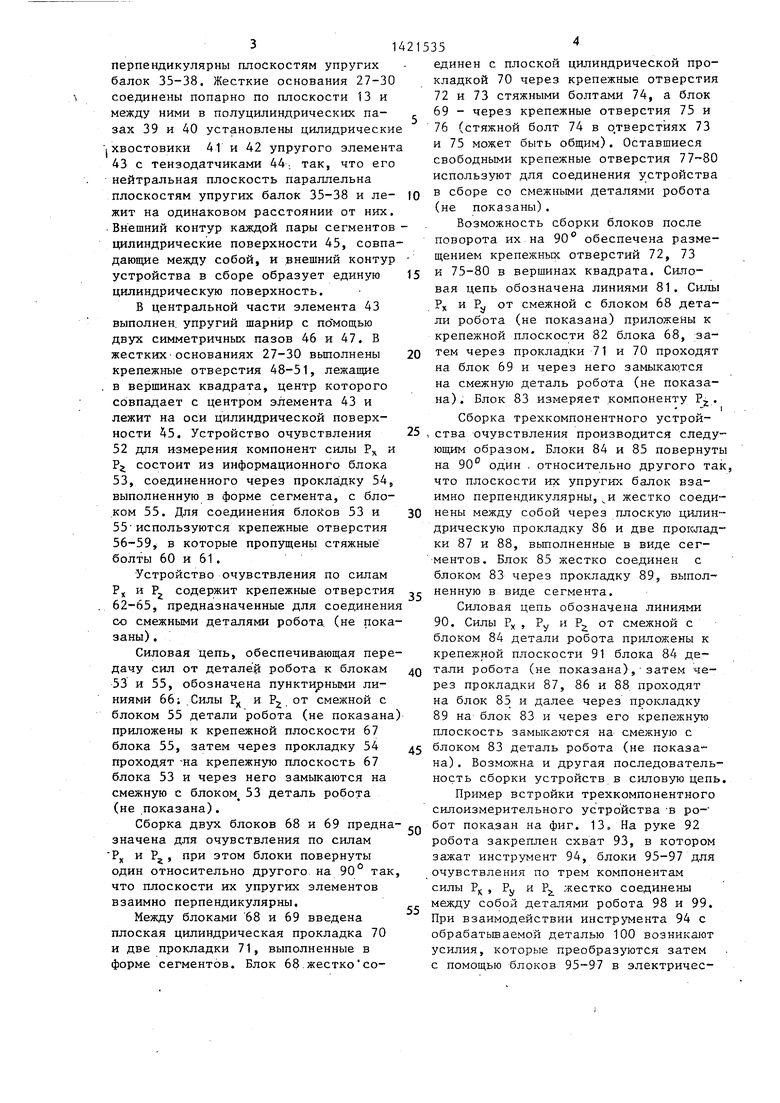
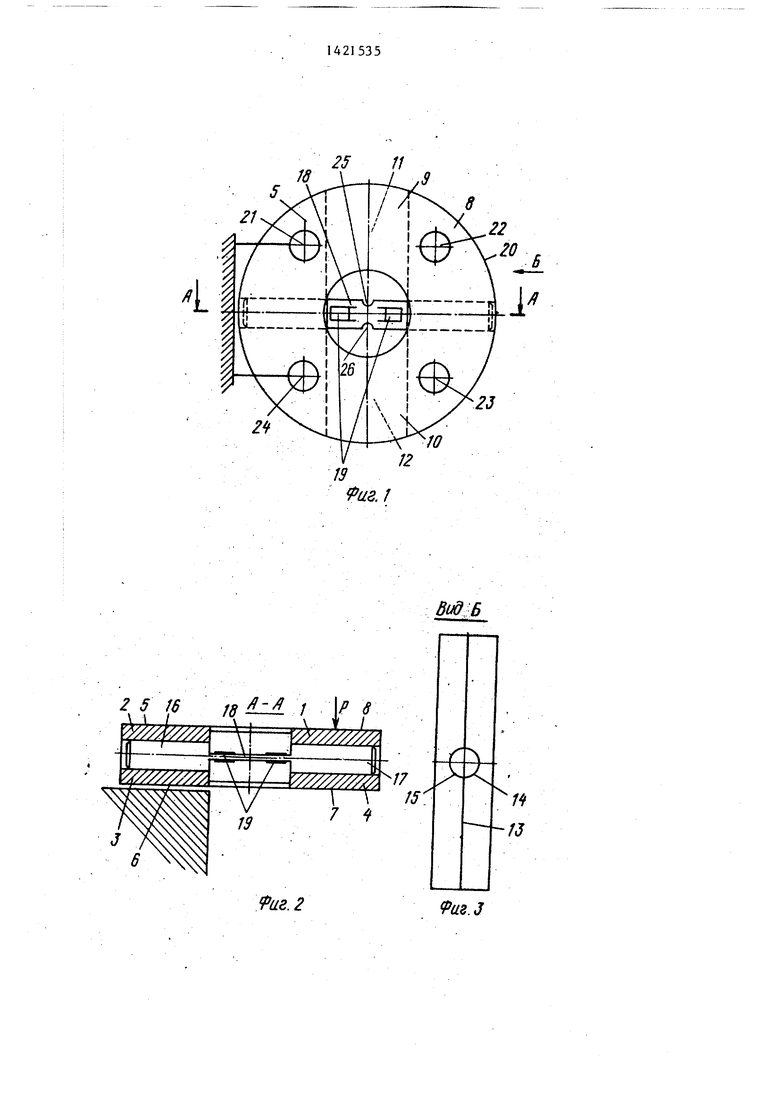
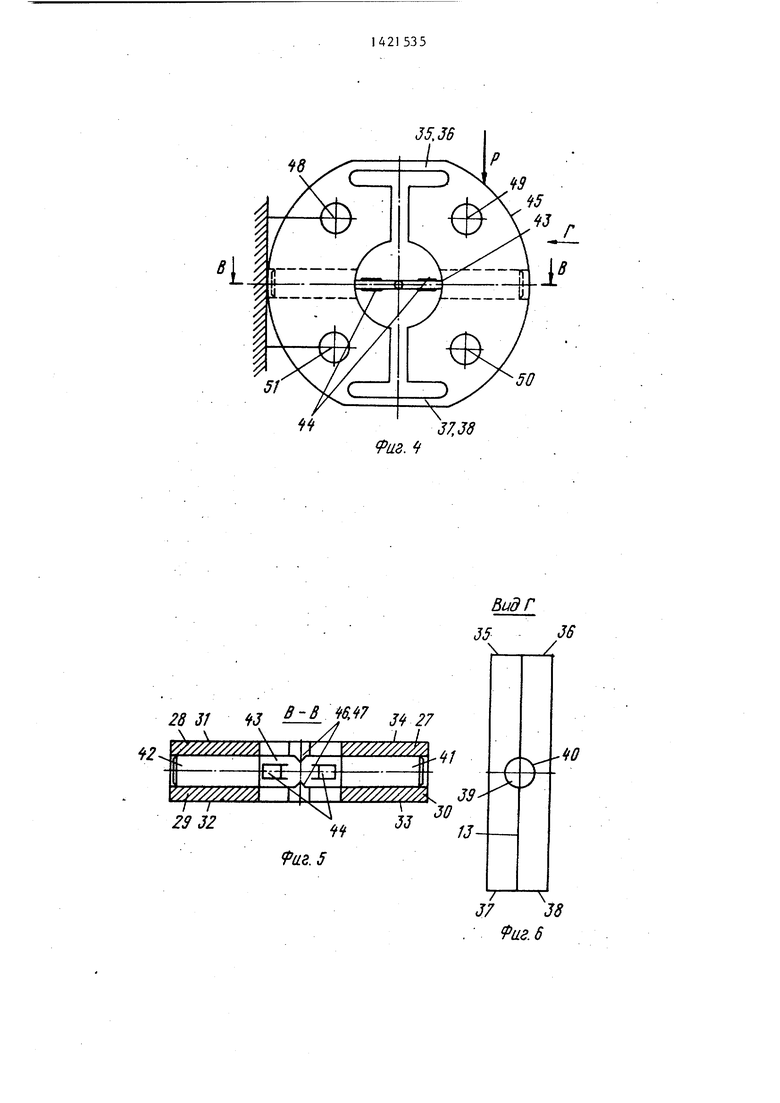
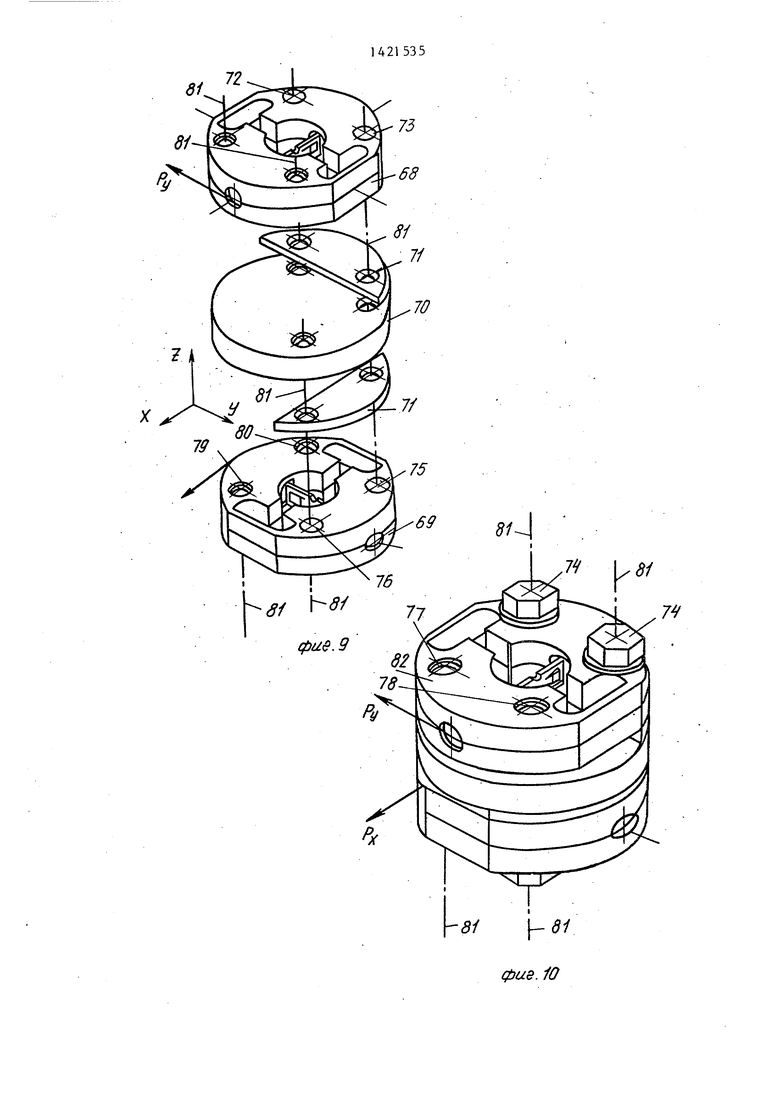
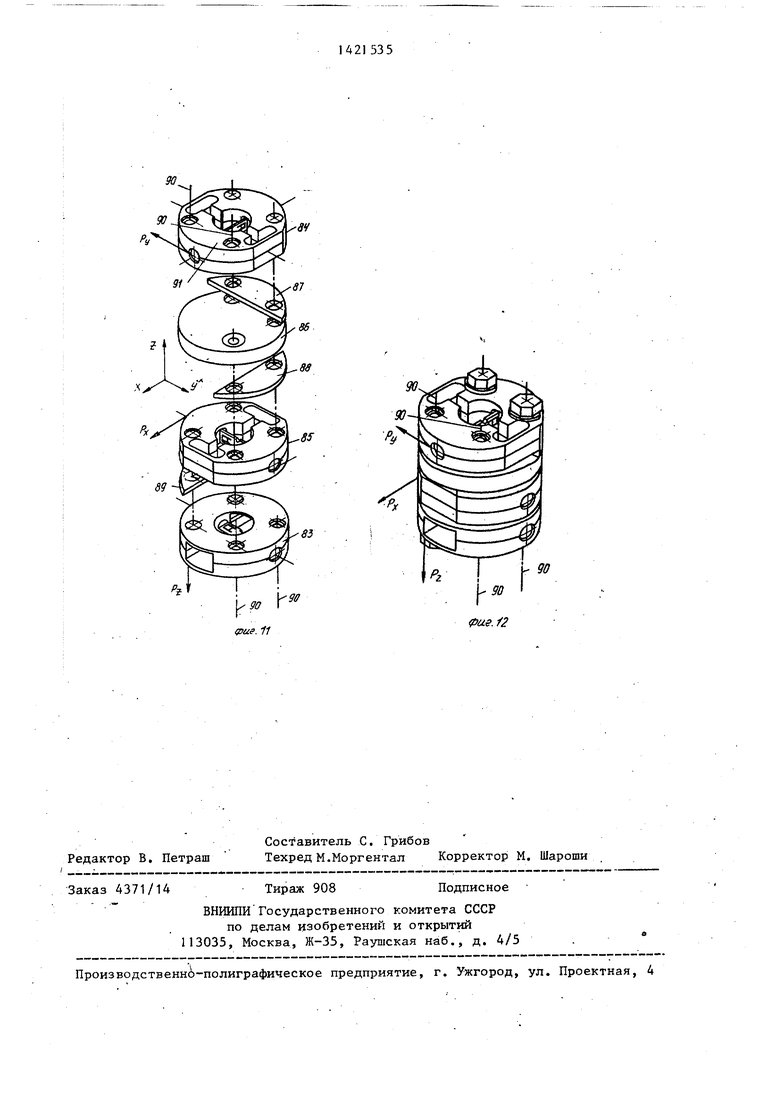
На фиг. 1 показан информационный блок, общий вид, на фиг. 2 - разрез А-А на фиг. 1, на фиг. 3 - вид Б на фиг. 1, на фиг. 4 - информационный блок для измерения силы Р, действующей на боковую цилиндрическую поверхность блока; на фиг, 5 - разрез В-В на фиг. 4; на фиг. 6 - вид Г на фиг.4 на фиг. 7 - схема сборки устройства очувствления из двух информационных (блоков для измерения компонент силы Р и Р2 на фиг. 8 - устройство очувствления для измерения компонент силы Р и Р в сборке на фиг. 9 - схема сборки устройства очувствления для измерения компонент силы Р и на фиг. 10 -.устройство очувст- Ьления для измерения компонент силы Pj( и PJ. в сборке, на фиг. 11 - схема сборки устройства очувствления для измерения компонент силы Р , Р, и Р на фиго 12 - устройство очувствления для измерения компонент силы Р , Рч, и PJ в сборке; на фиг. 13 - устройство очувствления, установленное на руке манипулятора.
Устройство очувствления содержит информационные блоки, состоящие из жестких оснований, выполненных в вид двух пар симметрично расположенных сегментов 1,2 и 3,4 с крепежными поверхностями в виде плоских граней 5-8, соединенными между собой упругими параллельными балками 9-12, размещенными попарно в двух параллельных плоскостях и образующими направ0
5
0
5
0
5
0
ляющие поступательного перемещения, причем плоекие грани 8 параллельны Ш10СКОСТ55М упругих балок 9-12. Жесткие основания 1,2 и 3,4 соединены попарно по плоскости 13, и между ними в .полуцилиндрических пазах 14 и 15 расположены хвостовики 16 и 17 упругого элемента 18 с тензодатчиками 19 так, что нейтральная плоскость упругого элемента 18 параллельна нейтраль- ньм плоскостям упругих балок 9-12 и лежит на одинаковом расстоянии от них. Внешний контур 20 каждой пары сегментов - цилиндрические поверхности, совпадающие между собой так, что внешний контур устройства в сборе образует единую цилиндрическую поверхность. В жестких основаниях выполнены крепежные отверстия 21-24, лежащие в вершинах квадрата,, центр которого совпадает с центром элемента 18 и лежит на оси цилиндрической поверхности 20.
. В центральной части балки с тензо- резисторами выполнен упругий шарнир с помощью двух симметричных пазов 25 и 26.
Информационны блок, предназначенный для очувствления по силе, направление которой параллельно кре- пежным плоскостям (фиг. 4-6), состоит из жестких оснований, выполненных в виде двух пар симметрично расположенных сегментов 27-30 с крепежными поверхностями в виде плоских граней 31-34, соединенных между собой упругими параллельными балками 35-38, размещенными попарно в двух параллельных плоскостях и образующими направляющие поступательного перемещения. Причем плоские грани 31-34
31
перпендикулярны плоскостям упругих балок 35-38. Жесткие основания 27-30 соединены попарно по плоскости 13 и между ними в полуцилиндрических па- зах 39 и 40 установлены дилидрические
1 хвостовики 41 и 42 упругого элемента 43 с тензодатчиками 44; так, что его нейтральная плоскость параллельна плоскостям упругих балок 35-38 и ле- жит на одинаковом расстоянии от них.
.Внешний контур каждой пары сегментов цилиндрические поверхности 45, совпадающие между собой, и внешний контур устройства в сборе образует единую цилиндрическую поверхность.
В центральной части элемента 43 выполнен, упругий шарнир с по мощью двух симметричных пазов 46 и 47. В жестких-основаниях 27-30 вьшолнены крепежные отверстия 48-51, лежащие в вершинах квадрата, центр которого совпадает с центром элемента 43 и лежит на оси цилиндрической поверхности 45. Устройство очувствления
52для измерения компонент силы Р и PJ состоит из информационного блока 53, соединенного через прокла:дку 54, выполненную в форме сегмента, с блоком 55. Для соединения блоков 53 и 55 используются крепежные отверстия 56-59, в которые пропущены стяжные болты 60 и 61.
Устройство очувствления по силам PJ и Р содержит крепежные отверстия 62-65, предназначенные для соединения со смежными деталями робота, (не показаны) .
Силовая цепь, обеспечивающая передачу сил от деталей робота к блокам
53и 55, обозначена пунктирными линиями 66; .Силы Р и Р от смежной с блоком 55 детали робота (не показана) приложены к крепежной плоскости 67 блока 55, затем через прокладку 54 проходят -на крепежную плоскость 67 блока 53 и через него замыкаются на смежную с блоком 53 деталь робота
(не показана).
Сборка двух блоков 68 и 69 предна
значена для очувствления по силам
Р, и Р.
Z
при этом блоки повернуты
один относительно другого на 90 так что плоскости их упругих элементов взаимно перпендикулярны.
Между блоками 68 и 69 введена плоская цилиндрическая прокладка 70 и две прокладки 71, выполненные в форме сегментов. Блок 68 жестко со
0
5
0 5
О
д
5
0
5
535
единен с плоской цилиндрической прокладкой 70 через крепежные отверстия 72 и 73 стяжными болтами 74, а блок 69 - через крепежные отверстия 75 и 76 (стяжной болт 74 в о.тверстйях 73 и 75 может быть общим). Оставшиеся свободными крепежные отверстия 77-80 используют для соединения устройства в сборе со смежными деталями робота (не показаны).
Возможность сборки блоков после поворота их на 90 обеспечена размещением крепежных отверстий 72, 73 и 75-80 в вершинах квадрата. Силовая цепь обозначена линиями 81. Силы Р и Ру от смежной с блоком 68 детали робота (не показана) приложены к крепежной плоскости 82 блока 68, затем через прокладки 71 и 70 проходят на блок 69 и через него замыкаю.тся на смежную деталь робота (не показана) . Блок 83 измеряет .компоненту Р .
Сборка трехкомпонентного устрой- , ства очувствления производится следующим образом. Блоки 84 и 85 повернуты на 90 один . относительно другого так, что плоскости их упругих балок взаимно перпендикулярны,и жестко соединены между собой через плоскую цилиндрическую прокладку 86 и две прокладки 87 и 88, вьшолненные в виде сег- ментов. Блок 85 жестко соединен с блоком 83 через прокладку 89, выполненную в виде сегмента.
Силовая цепь обозначена линиями 90. Силы Ру , Ру и Р от смежной с блоком 84 детали робота npi-шожены к крепежной плоскости 91 блока 84 детали робота (не показана), затем через прокладки 87, 86 и 88. проходят на блок 85 и далее через прокладку 89 на блок 83 н через его крепежную плоскость замьжаются на смежную с блоком 83 деталь робота (не показана) . Возможна и другая последовательность сборки устройств в силовую цепь.
Пример встройки трехкомпонентного силоизмерительного устройства В ро- бот показан на фиг. 13, На руке 92 робота закреплен схват 93, в котором зажат инструмент 94, блоки 95-97 для очувствления по трем компонентам силы Р , Pj и Р жестко соединены между собой деталями робота 98 и 99. При взаимодействии инструмента 94 с обрабатьшаемой деталью 100 возникают усилия, которые преобразуются затем с помощью блоков 95-97 в электрические сигналы, далее используемые в системе управления роботом для предохранения от перегрузки, повьшения точности обработки, выбора оптимального режима обработки, селекции деталей по весу, сборочных операций и других задач.
Устройство работает следующим об- разрм..
Сила Р, приложенная к крепежной п|1оскости 8 (крепежные .плоскости 5 и 6 жестко закреплены), вызывает деформацию упругих балок 9-12, а также деформацию элемента с тензодатчиками При этом тензодатчики 19, соединен- Iные моствую или полумоствую схему, преобразуют силу Р, по которой про- изводится очувствление, в электрический сигнал, который используется В:системе управления робота или манипулятора (схемы соединения тензо- рёзисторов и подключения их к системе управления не показаны).
Сила Р, приложенная к крепежной плоскости 33 или 34 (крепежные плоскости 31 и 32 жестко закреплены, фиг. 4-6), вызывает деформацию упругих балок 35-38, а также деформа- Щ1Ю элемента 43 с тензодатчиками. Пр этом тензодатчики 44, соединенные в мостЬвую или полумостовую схему (не Показаны), преобразуют силу Р, по которой производится очувствление, в электрический сигнал, который ис- пользуется в системе управления робота или манипулятора.
Выполнение жестких оснований в виде одинаковых симметрично расположенных сегментов с крепежными поверх- ностями в виде плоских граней и выполнение в них крепежных отверстий в вершинах квадрата, центр которого находится на оси цилиндрической поверхности, позволяет агрегатировать несколько устройств, а также позволяет обеспечить очувствление по двум или трем компонентам силы. При этом Сохраняются неизменными присоединительные размеры устройств для очувст вления по одной, двум или трем компонентам силы, что упрощает встройку устройства в робот.
Наличие направляющих поступательного перемещения, состоящих из упругих балок 9-12, соединяющих жесткие основания 1-4, и размещение элемента 18 с тензодатчиками на равном расстоянии от них обеспечивают переме
0
5 0
5 О с
О 5 ,.
5
щение жестких оснований устройств только в направлении той компоненты силы, по которой производится очувствление, и защищает элемент с тензодатчиками от перемещения или закручивания моментом в других направлениях, что повышает достоверность преобразования и позволяет без ущерба для качества очувствления агрегатировать блоки в последовательные силовые цепи, т.е. когда на устройство действует не только та компонента силы, по которой производится очув- .ствление, но и другие компоненты силы и также моменты.
Это уменьшает погрешность преобразования от взаимовлияния нескольких компонент силы и момента до малого уровня, т.е. повышает избирательность устройства по отношению к силе Р, что расширяет динамический диапазон преобразования по каждой компоненте силы и расширяет область использования устройства в робототехнике, поскольку сигН ал каждого устройства пропорционален только той компоненте силы,для очув(твления по которой он предназначен. Поэтому соответствующий сигнал можно использовать в схеме управления робота без предварительной обработки для вьщеления каждой компоненты. Размещение упругих балок и элемента с тензодатчиками так, что их оси параллельны для каждого из блоков одной плоскости, позволяет уменьшить габаритные размеры устройства.
Размещение крепежных отверстий в жестких основаниях, перпендикулярных упругим балкам, позволяет затягивать стыки устройств между собой и стыки устройств с соседними деталями робота без нагружения элемента с тензодатчиками паразитными деформациями, т.е. позволяет существенно повысить жесткость робота с устройством очув- . ствления, не снижая при этом достоверности очувствления, что расширяет диапазон преобразования без изменения конструкции устройства.
Устройство обеспечивает возможность агрегатирования нескольких блоков между собой в случае, когда необходимо очувствление по двум или трем взаимно перпендикулярным направлениям силы, хотя бы одцо из которых параллельно оси цилиндрической поверхности. Этой же цели служит вьшолнение элемента с .тензодатчиками с жесткими цилиндрическими хвостовиками, который благодаря этому может быть закреплен между сегментами в пазах полукруглого сечения в двух п оложениях так, что его плоскость параллельна либо перпендикулярна оси цилиндрической поверхности, образующей контур сегментов. Этим также обес печивается возможность,не изменяя габаритных и присоединительных размеров устройства повернуть на 90 ось его чувствительности.Конструкция устройства позволяет агрегатирозать несколько блоков межд собой, что существенно расширяет число решаемых задач по очувствлению роботов и манипуляторов, а также обеспечивает встройку блоков в кистевые суставы роботов, непосредственно в кисть, под технологические платформы без увеличения типажа устройств.
. Для изменения диапазона преобразования по очувствляемой силе доста- точно,не изменяя параметров элемента с тензодатчиками,увеличивать или уменьшать толщину или длину упругих балок, образующих направляющие по- ступательногь перемещения. При этом также не происходит изменения габаритных размеров и присоединительных размеров устройства, что расширяет область его использования в робототехнике.
Предлагаемое устройство позволяет обеспечить очувствление роботов и манипуляторов для решения различных производственных задач: сборки, абразивной зачистки и т.п. При этом количество типоразмеров устройства равно количеству типоразмеров для очувствления по одной компоненте. Это упрощает производство устройств
и облегчает решение задач очувствления .. д 50
5 0
,Q
5
Формула изобретения
1, Устройство очувствления, содержащее соосно соединенные между собой цилиндрические информационные блоки, выполненные в виде жестких оснований, соединенных между собой упругими элементами с тензодатчиками, при этом плоскости упругих эле- ме нтов соответственных информационных блоков взаимно перпендикулярны между собой, отличающее ся тем, что, с целью повьшзения надежности, жесткие основания каждого ин- формационного блока выполнены в виде четырех сегментов, расположенных попарно-симметрично в двух параллельных плоскостях и соединенных между собой дополнительно введенными упругими балками, параллельными упругим элементам, при этом упругие элементы снабжены хвостовиками, установленными в направляющих, выполненных в жестких основаниях, причем в жестких .основаниях каждого информационного блока выполнены четыре крепежных отверстия, расположенные в вершинах квадрата, центр которого находится на оси информационного блока, при этом информационные блоки закреплены между собой с возможностью восприятия каждым из них усилия, действующего по соответствующей оси.
Z
аг./
2 5 J6
fu8.2
23
Раг.З
9и.г.
37,38
Вид Г
аг.6
56/ 66
61
60
SB
12
фие. iO
84
Редактор В. Петраш
Составитель С, Грибов
Техред М.Моргентал Корректор М. Шароши
Заказ 4371/14
Тираж 908
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Рг И 1-9В I
Фи$. 2
Подписное
| Очувствленный кистевой суставМАНипуляТОРА | 1979 |
|
SU795940A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
