11308541 2
Изобретение относится к устройст- режиме подъема магистраль соединяется вам предохранительного торможения с атмосферой через дроссель 13, При шахтных подъемных машин. этом настраивается в магистрали 21
Цель изобретения - повьшение эко- такое давление, которому соответству- номичности и ресурса задатчика. ет режим свободного выбега сигналиНа фиг.1 представлена принципиаль- затора 4 (тахогенератора) с замедле- ная схема задатчика; на фиг,2 - кон- нием, равным программному в зависи- струкция элемента подтормаживания, мости от положения сосудов в стволе
или угла наклона выработки. Величина
Задатчик содержит связанньй с ва- fO давления в магистрали 21 определяется лом подъемной машины 1 через электро- давлением аккумулятора 18 и сопротив- магнитную муфту 2 с обмоткой 3 управ- лением дроссешей 13 и 17. ления сигнализатор 4 скорости с вы- При спуске магистраль соединяется ходным регистором 5, подключенным че- с атмосферой через дроссель 12, со- рез выпрямитель 6 к сигнализатору 4, iS противление которого обеспечивает ре- инерционное звено калибровки интен- жим свободного выбега тахогенератора сивности затухания, содержащее махо- с замедлением, равным запланированно- вик 7 с элементами 8 подтормаживания му при спуске. При нормальной работе (коническими подшипниками), снабжен- подъемной машины контактор 23 обтека- ными блоком 9 регулирования. 20 ется током, а его контакт 23,1 в цеБлок 9 содержит управляемьй от пи реле 22 замкнут, при этом обмотка датчика 10 направления движения подъ- 3 муфты 2 через контакт 22.1 подклю- емной машины четырехлинейный двухпо- чена к питающей сети. Муфта 2 включе- зиционньш распределитель 11 с нере- на, сигнализатор Д выдает сигнал, гулируемым 12 и регулируемым 13 дрос- пропорциональный скорости подъемной селями, трехлинейный трехпозиционньй машины,
распределитель 14 с ручным управлени- В режиме предохранительного тормо- ем и фиксатором, связанный с напорной жения контактор 23 обесточивается, магистралью 15 через обратный клапан обесточивая контактом 23.1 реле 22, 16, дроссель 17, аккумулятор 18, под- которое с выдержкой времени, учиты- ключенный к напорной магистрали 15, вающей инерционность тормоза, размы- а также распределители 19 и 20, под- кает контакт 22,1 обесточивая обмот- ключенные к магистрали 21 управляемо- ку 3 муфты 2 и отсоединяя сигнали- го давления.затор 4. Одновременно обесточиваются
Параллельно обмотке 3 управления 35 атушки управления распределителей подключены реле 22 времени с контак- 19 и 20, что приводит к установлению том 22.1 и контактор 23 предохрани- в магистрали 21 давления, величина тельного торможения с контактом . которого определяется в идом выполняеНаружная обойма 24 конического под- мой операции (от положения датчика шипника (фиг.2) расположена в двух 10) и сопротивлениями дросселей 17, кольцах 25 и 26, Между кольцом 25 и 12 и 13. Под действием силы давления корпусом 27 подшипника установлена жидкости и силы сжатия пружин 28 внеш- пружина 28 сжатия, а в крьшгке 29 кор- няя обойма 24 подшипника занимает по- пуса установлены связанные с кольцом ложение, при котором сопротивление 26 толкатели 30, поршневые полости вращению маховика 7 совместно с яко- которых сообщены с магистралью 21, рем тахогенератора обеспечивает проВнутренняя обойма 31 подшипника граммное изменение сигнала на предо- установлена на в-алу 32 и зафиксирова- хранительное торможение, на гайкой 33.
Задатчик работает следующим обра- 50 Формула изобретения зом.
В процессе ручной наладки устанав- Задатчик программы предокранитель- ливают распределитель 11 в положения., ного торможения подъемной машины, со- соответствующие режиму подъеуа и держащий связанньй с валом подъемной спуска сосуда. При подъеме жидкость 55 машины через электромагнитную муфту (или воздух) подается в камеру управ- сигнализатор скорости с инерционным ления распределителя 11, а при спус- звеном калибровки интенсивности зату- ке камера соединяется со сливом. В хания, включающий в себя маховик и
элементы его подтормаживания, выполненные на конических подшипниках и снабженные блоком регулирования и выходное звено, связанное с сигнализатором скорости, отличающий 5 с я тем, что, с целью повьшения экономичности и ресурса .-задатчика, наружная обойма каждого конического подшипника расположена в двух кольцах, Между одним из которых и корпусом О подшипника установлена пружина сжатия.
а в крышке корпуса расположены связанные с другим кольцом толкатели, поршневые полости которых сообщены с выходной магистралью блока управления, содержащего управляемый от датчика направления движения подъемной машины четырехлинейный двухпозицион- ный распределитель, одна и другая линии которого сообщены с атмосферой через нерегулируемый и регулируемый дроссели соответственно.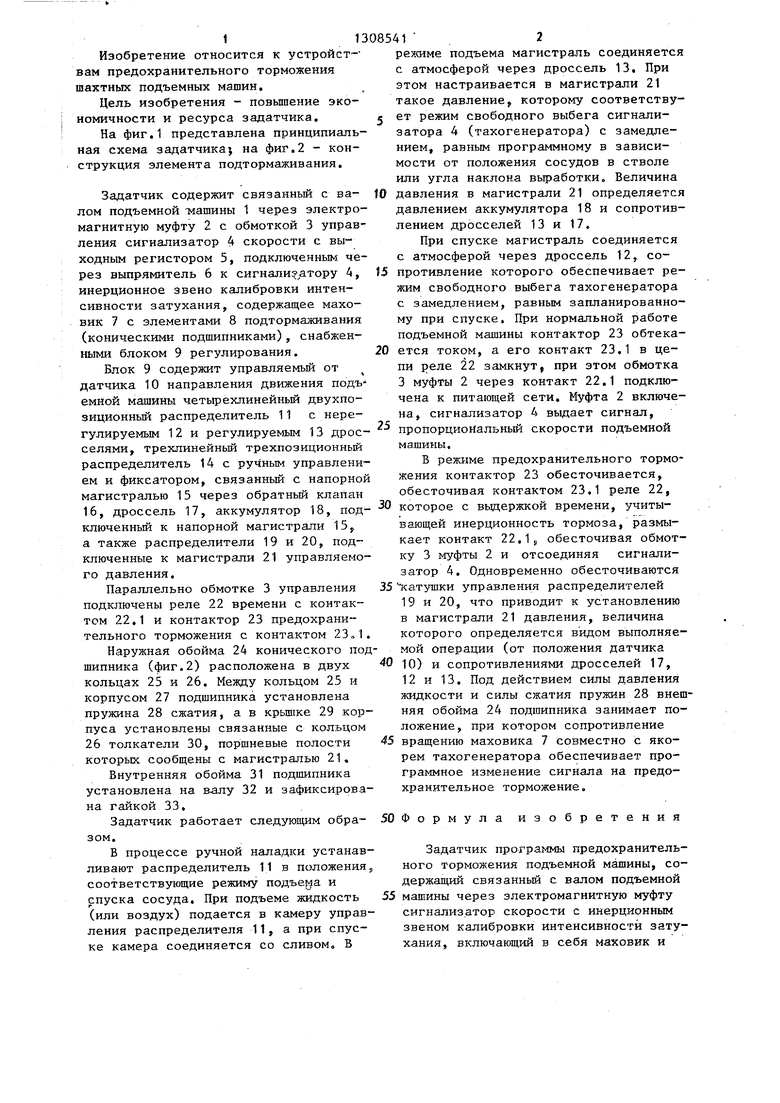

Изобретение относится к устройствам предохранительного торможения шахтной подъемной машины и имеет своей целью повьшение экономичности и ресурса задатчика. Задатчик включает в себя сигнализатор 4 скорости подъемной машины, связанный с валом подъемной машины 1 через инерционное звено калибровки интенсивности затухания, выполненное на маховике 7 и элементах 8 прдтормаживания, которые регулируются с помощью блока 9 регулирования, выполненного на распределителях 11,14,19 и 20. Распределитель 11 управляется от датчика 10 направления движения подъемной.машины. Элементы подтормаживания выполнены на конических подшипниках, конструкция которых предусматривает возможность изменения интенсивности торможения в зависимости от положения сосуда, угла наклона выработки и вида выполняемой операции. 2 ил. б сл
23
Редактор М. Бланар
Составитель Г. Корнева
Техред В.Кадар Корректор А. Обручар
Заказ 1672/17 Тираж 721Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
| Устройство для регулируемого предохранительного торможения подъемной машины | 1977 |
|
SU691375A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
