1
Изобретение относится к области автоматизированного электропривода с применением устройств цифровой вычислительной техники и может быть использовано для управления промышленными механизмами, где необходимо высокоточное регулирование как положения, так и скорости рабочих органов, например, для управления станками, летучими ножницами : и пилами прокатных станов.
Известны цифровые системы )а1равления механизмами, в которых рабочий орган должен придти в заданное положение с заданной скоростью 1 и Г21.
К недостаткам ук-аза1шых систем следует отнести то, что в них используются даа разнотипных датчика положения и скоросто, сочленяемых с одним механизмом, а также то, что измерители положения содержат счетчики числа импульсов, KOTOpijie допускают возможность сбоев при последовательном счете импульсов в условиях значительных .промышленных помех и потери накопленной в счетчнке ин(|)орман,ии при исрермрях питания. Эти недостатки снижают надежность работы системы и усложняют ее конструкцию.
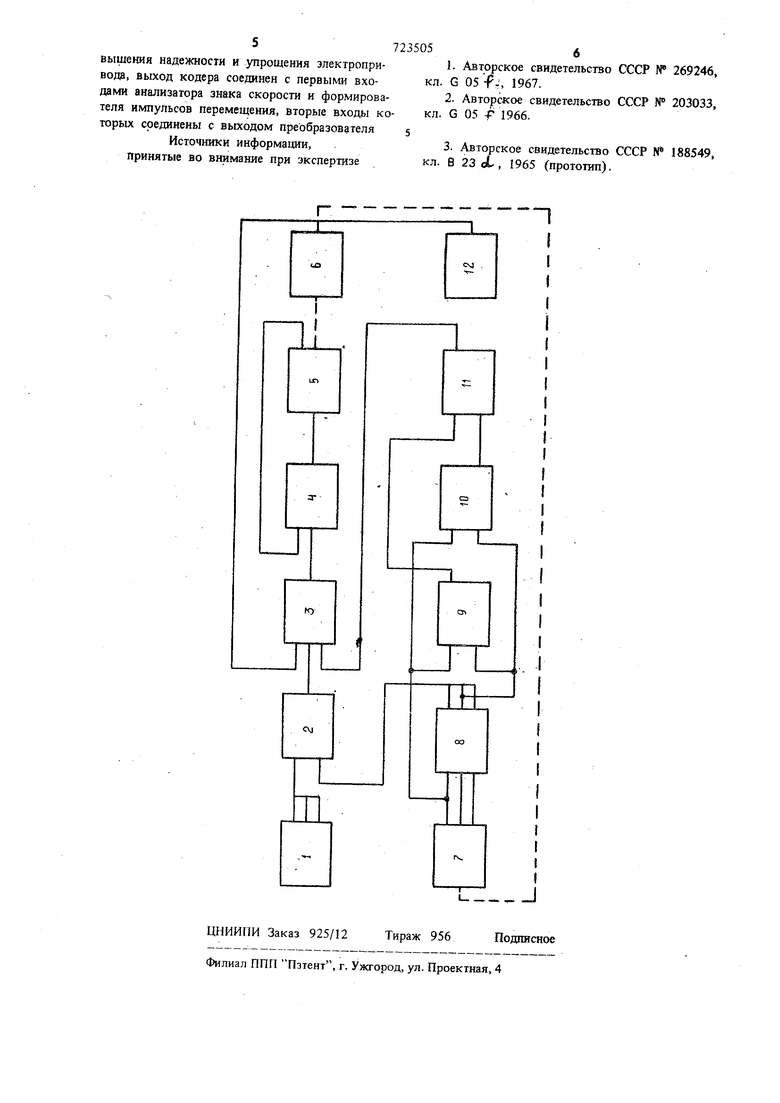
Наиболее близким техническим решением к данному изобретению является цифровой следяидай электропривод, содержащий задатчик положения и задатчик скорости, подключенные к первым входам последовательно соединенных регулятора положения и регулятора CKOJIOCTH, регулятор тока, вход которого соединен с выходом регулятора скорости и выход - со входом исполнительного двигателя, кодер со входом, механически связанным с объектом, и выходами, поразрядно связанными с соответствующими входами преобразователя кода, выходы разрядов которого подсоедипены к соответствующим входам регулятора положения, а также анализатор знака скорости, формирователь импульсов перемещения и измеритель частоты, вход которюго соответственно подключены к выходу анализатора знака скорости н выходу формирователя импульсов перемегагння, а выход подключен ко второму входу pei улятора скорости 3. Недостаток данного устр(эйства - использование двух разнотипных датчиков скорости и положения, а также возможность сбоев счетчика. Цель изобретения - повышение надежностм и упрощение электропривода. Цель достигается тем, что выход кодера соединен с первыми входами анализатора знака скорости и форм)рователя импульсов перемещения, вторые входы которых соединены с выходом преобразователя кода. На. чертеже представлена функциональная схема предложенного устройства. I Оно содержит дифровой задагчик 1 положения, регулятор 2 положения, подчиненный ему регулятор 3 скорости, которому подчинен ре- гулятор 4 тока исполнительного двигателя 5, объект управления 6 и механически связанный с ним кодер 7, преобразователь 8 кода датчика положения, анализатор 9 знака скорости и формирователь 10 импульсов перемещения, связанные своими выходами с измерителем 11 частоты, а также задатчик 12 скорости. Кодер 7 выполнен в одном из двоичных кодов, позволяющем устранить неоднозначтюсть считывания числа с кодовой шкал/ы, например, в коде Грея. Выходы п разрядов кодера 7 связаны со входами преобразователя кода 8 в арифметический двоич1п ш коя, выходы о разрядов которого соединены со входаьш регулятора 2 положения. Другие п входов регулятора по ложения связаны с задатчиком положею1я 1 .Устройства 7 и 8 вместе составляют узел обратной связи по положению объекта управления. Выход первого (младщего) разряда кодера соединен со входами анализатора 9 знака скорости и формирователя 10 импульсов, вторые входы которых связаны со вторым (младшим) разрядом преобразователя 8 кода. Младцшй ра ряд кодера и следующий за ним по порядку разряд преобразователя кода вместе с устройствами 9, 10 и II образуют узел -обратной связи по скорости перемещения обтьекта. Система работает следующим образом. Задание положения обьекта упрагзления 6 подается с выхода устройства J на вход регулятора 2 положения в виде мсла в двоичном коде. Обратная связь по действительному положению объекта заводится на другой вход ре гулятора 2 с помощью устройств 7 и 8 также в виде числа в двоиН{ом коде. Выходной сигнал регулятора 2, соогветствующий рассогласованию по положению в системе, подается в ка честве задания на вход регулятора скорости 3 в цифровом или аналоговом виде - в зависимости от требований по точности регулировани скорости. На другой вход регулятора 3 подает ся сигнал зада1шя постоянной составляющей скорости от задатчика 12. Обратная связь по ействительной, скороста перемещения объекта правления подается на вход регулятора 3 с ыхода измерителя 11 ) в таком же виде, что сигналы от устройств 2 и 12. К этому виду игнала, например, к напряже1шю, измеритель 11 реобразует частоту импульсов с выхода форврователя 10, пропорциональную скорости пеемещения с учетом сигнала знака скорости, оступающего от анализатора 9. Знак скорости пределяется по последовательности чередования диничных и нулевых сигналов в первом разряе кодера и втором разряде преобразователя кода, образующих четыре различные кодовые омбинации, циклически повторяющиеся по мере перемещения кодовой щкалы кодера. Эти же кодовые комбинации используются и для формирования импульсов перемещения устройством 10, так что появлению каждой очередной комбинации соответствует вьщача импульса на выходе формирователя 10, а частота импульсов пропорциональна скорости перемещения кодовой шкалы. Выхбдной сигнал регулятора 3 скорости,соответствующий рассогласованию по скорости в системе, является заданием для регулятора 4 тока, на второй вход которого подается обратная связь по току дв ггателя 5. Таким образом, в двигателе поддерживается ток, необходимый для отработки рас х гласований в системе по скорости и по положению. Изобретение позволяет стшзить стокмость изготовления и эксплуатации высокочастотных промышленных автоматизированных злектроприводов за счет повышеш1я их надежности и упрощения конструкции Формула изобретения Цифровой следящий электропривод, содер а11шй задатчик положения и задатчик скорости, подключенные к первым входам последовательно соединенных регулятора положения и регулятора скорости, регулятор тока, вход fjOTOporo соединен с выходом регулятора скорости и вьгкод - со входом исполнительного двигателя, кодер со входом, механически связанным с объектом, и выходами, поразрядно связанными с соответствующими входами преобразователя крда, выходы разрядов которого подсоединены к соответствующим входам регулятора положения, а также ана;шзатор знака скорости, формирователь импульсов перемещения и измеритель частоты, входы которого соответственно подключены к выходу анализатора знака скорости и выходу формирователя импульсов перемещения, а выход подключен ко второму входу регулятора скорости, о тличающийся тем, что, с целью по
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Цифровая система синхронного управления приводами | 1974 |
|
SU543115A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Система автоматического управления трубогибочным станом | 1987 |
|
SU1505624A1 |
| Электропривод | 1983 |
|
SU1179511A1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1965 |
|
SU171171A1 |
| Частотно-управляемый асинхронный электропривод | 1984 |
|
SU1290464A1 |
| Система управления транспортным средством | 1987 |
|
SU1550480A1 |
| Способ стабилизации толщины изоляции кабеля и устройство для его реализации | 1982 |
|
SU1302248A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
