Изобретение относится к схемам защиты электрических двигателей, реагирующих на ток перегрузки, и может быть использова- .но в прокатном нроизводстве, например в системе автоматического регулирования толщины полосы, прокатываемой в прокатном стане, для тепловой защиты электродвигателей нажимных винтов и является усовершенствованием известного устройства по авт. св. № 765930.
Целью изобретения является повыщение точности функционирования.
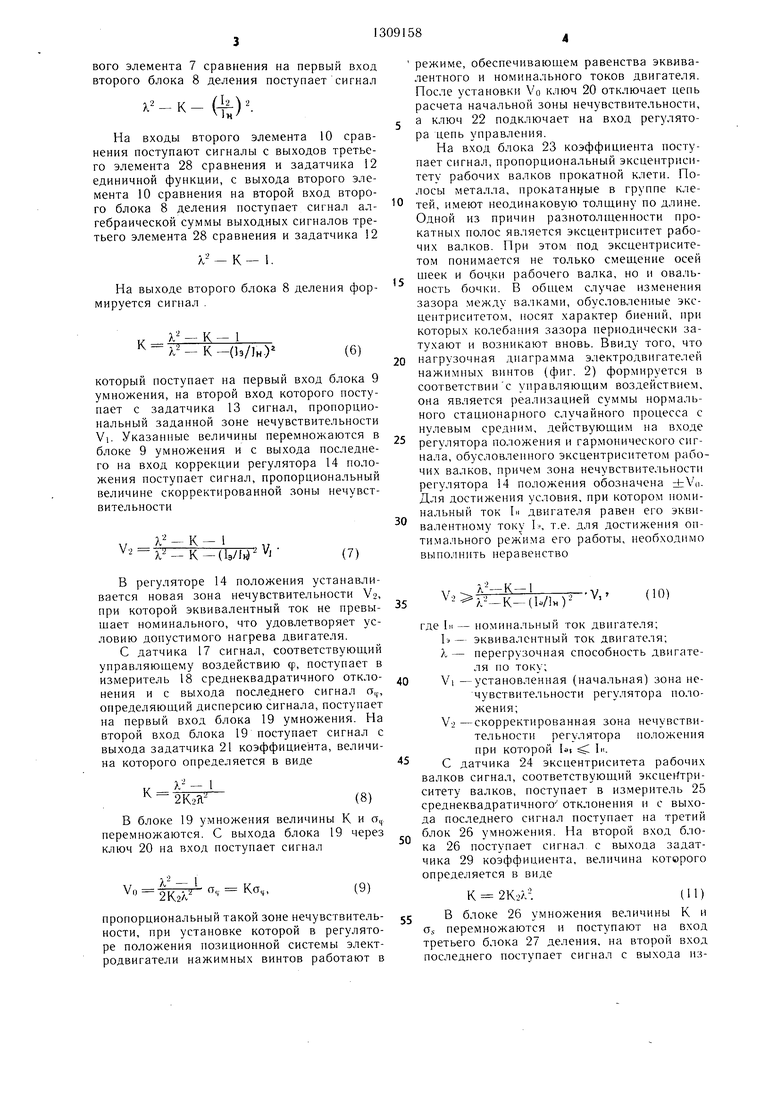
На фиг. 1 приведена функциональная схема предложенного устройства; на фиг. 2 - кривая процесса управляющего воздействия системы автоматического регулирования электродвигателями нажимных винтов прокатной клети с нанесенной зоной нечувствительности регулятора положения на уровне + Uo с учетом эксцентриситета рабочих валков.
Устройство содержит последовательно соединенные датчик 1 тока, первый квадратичный преобразователь 2, первый интегратор 3, составляющие датчик 4 квадрата действующего значения тока якоря двигателя. Выходы датчика 4 и задатчика 5 максимального допустимого нагрева подключены к входу первого блока 6 деления. Выход первого блока 6 деления соединен с первым входом первого элемента 7 сравнения. Выход первого элемента 7 сравнения подключен к первому входу второго блока 8 деления, а выход последнего к первому входу первого блока 9 умножения. На второй вход второго блока 8 деления подключен выход второго элемента 10 сравнения, на входы которого подключены задат- чики 11 и 12, выход задатчика 13 зоны нечувствительности регулятора положения соединен со вторым входом первого блока 9 умножения, выход последнего подключен к одному из входов регулятора 14 положения исполнительного механизма. Задатчик 5 максимального допустимого нагрева электродвигателя состоит из последовательно соединенных задатчика 15 квадрата номинального тока и второго интегратора 16. Устройство содержит также последовательно соединенные датчик 17 управляющего воздействия, измеритель 18 среднеквадратичного отклонения управляющего воздействия, второй блок 19 умножения и первый ключ 20, причем первый ключ 20 подключен к второму входу регулятора 14 положения. Выход задатчика 21 коэффициента
If 1 ,. 1
IV. Г
2 к 2 .( )
где К постоянный коэффициент;
Я -- перегрузочная способность двигателя,
подключен к второму входу второго блока 19 умножения. Второй ключ 22 подключен параллельно входу регулятора 14 положения.
Дополнительно введены блок 23 задания эксцентриситета коэффициента, выполненный в виде последовательно соединенных датчика 24 эксцентриситета рабочих валков, измерителя 25 среднеквадратичного отклонения эксцентриситета рабочих валков, третьего блока 26 умножения, третьего блока 27 деления, третий элемент 28 сравнения, вто- рой задатчик 29 коэффициента
К 2К2.%
(2)
причем выход последнего подключен к второму входу третьего блока 26 умножения,
к второму входу третьего блока 27 деления подключен выход измерителя 18 среднеквадратичного отклонения управляющего воздействия, а выход третьего элемента 28 сравнения соединен с входами первого 7 и второго 10 элементов сравнения, к второму входу третьего элемента 28 сравнения подключен задатчик 11 перегрузочной способности 11.
Устройство работает следующи.м образом. С датчика 1 тока сигнал, пропорциональный фактическому току контролируемого двигателя, поступает на вход квадратичного преобразователя 2, на выходе которого образуется сигнал, пропорциональный квадрату фактического тока, который поступает на вход интегратора 3 и преобразу- ется в сигнал, пропорциональ ный интегралу квадрата тока
Si dt Tl|
(3)
где Т - время интегрирования;
35Ь-эквивалентный ток двигателя.
Сигнал с интегратора 3 поступает на вход первого блока 6 деления, на второй вход которого поступает с выхода задатчика 5 максимально допустимого нагрева сигнал, пропорциональный интегралу от квад40 рата номинального тока
Sl dt TI,
(4)
где 1и - номинальный ток двигателя. 45 С выхода первого блока 6 деления на вход элемента 7 сравнения поступает сигнал
Til
ТЙ
IN
(5)
С выхода задатчика 11 перегрузочной способности по току сигнал, пропорциональный Х, поступает на второй вход третьего элемента 28 сравнения, на выходе которого формируется сигнал,
55Х - К
который поступает на второй вход первого элемента 7 сравнения. С выхода первого элемента 7 сравнения на первый вход второго блока 8 деления поступает сигнал
-К- fr)l IH На входы второго элемента 10 сравнения поступают сигналы с выходов третьего элемента 28 сравнения и задатчика 12 единичной функции, с выхода второго элемента 10 сравнения на второй вход второго блока 8 деления поступает сигнал алгебраической суммы выходных сигналов третьего элемента 28 сравнения и задатчика 12
Я- - К - 1.
На выходе второго блока 8 деления формируется сигнал .
К
А,- - К - 1 (Ь/1н.)
который поступает на первый вход блока 9 умножения, на второй вход которого поступает с задатчика 13 сигнал, пропорциональный заданной зоне нечувствительности Vi. Указанные величины перемножаются в блоке 9 умножения и с выхода последнего на вход коррекции регулятора 14 положения поступает сигнал, пропорциональный величине скорректированной зоны нечувствительности
: - к
V2 K(y,2Vj(7)
в регуляторе 14 положения устанавливается новая зона нечувствительности VQ, при которой эквивалентный ток не превышает номинального, что удовлетворяет условию допустимого нагрева двигателя.
С датчика 17 сигнал, соответствующий управляющему воздействию ф, поступает в измеритель 18 среднеквадратичного отклонения и с выхода последнего сигнал о,,, определяющий дисперсию сигнала, поступает на первый вход блока 19 умножения. На второй вход блока 19 поступает сигнал с выхода задатчика 21 коэффициента, величина которого определяется в виде
К
ЖзГ
В блоке 19 умножения величины К и а,,, перемножаются. С выхода блока 19 через ключ 20 на вход поступает сигнал
Vo
2К2
Ка„,
пропорциональный такой зоне нечувствительности, при установке которой в регуляторе положения позиционной системы электродвигатели нажимных винтов работают в
режиме, обеспечивающем равенства эквивалентного и номинального токов двигателя. После установки V o ключ 20 отключает цепь расчета начальной зоны нечувствительности, а ключ 22 подключает на вход регулятора цепь управления.
На вход блока 23 коэффициента поступает сигнал, пропорциональный эксцентриситету рабочих валков прокатной клети. Полосы металла, прокатан ые в группе кле
теи, имеют неодинаковую толщину по длине.
30
Одной из причин разнотолщенности прокатных полос является эксцентриситет рабочих валков. При этом под эксцентриситетом понимается не только смещение осей шеек и бочки рабочего валка, но и овальность бочки. В общем случае изменения зазора между валками, обусловленные эксцентриситетом, носят характер биений, при которых колебания зазора периодически затухают и возникают вновь. Ввиду того, что
20 нагрузочная диаграмма электродвигателей нажимных винтов (фиг. 2) формируется в соответствии с управляющим воздействием, она является реализацией суммы нормального стационарного случайного процесса с нулевым средним, действующим на входе
25 регулятора положения и гармонического сигнала, обусловленного эксцентриситетом рабочих валков, причем зона нечувствительности регулятора 14 положения обозначена ±V(i. Для достижения условия, при котором номинальный ток 1 двигателя равен его эквивалентному току 1э, т.е. для достижения оптимального реж има его работы, необходимо выполнить неравенство
45
, (10)
где 1 - номинальный ток двигателя; 1э - эквивалентный ток двигателя; ь - перегрузочная способность двигателя по току;
40 Vi -установленная (начальная) зона нечувствительности регулятора положения;
V-2 -скорректированная зона нечувствительности регулятора положения
при которой Ь, 111.
С датчика 24 эксцентриситета рабочих валков сигнал, соответствуюид,ий эксцентриситету валков, поступает в измеритель 25 среднеквадратичного- отклонения и с выхода последнего сигнал поступает на третий блок 26 умножения. На второй вход блока 26 поступает сигнал с выхода задатчика 29 коэффициента, величина которого определяется в виде
К ( П )
55 В блоке 26 умножения величины К и GS перемножаются и поступают на вход третьего блока 27 деления, на второй вход последнего поступает сигнал с выхода измерителя 18 среднеквадратичного отклонения управляющего воздействия, соответствующий Os. На выходе блока 27 деления формируется сигнал
21ЫЧ (12)
который поступает на один из входов третьего элемента 28 сравнения.
При установке коэффициента К
зона нечувствительности регуля(7,
тора положения нажимных винтов соответствует режиму, обеспечивающему равенство эквивалентного и номинального токов двигателя с учетом эксцентриситета рабочих валков.
Преимуществом предлагаемого изобретения является то, что оно позволяет добиться оптимального режима работы электродвигателей нажимных винтов рабочей клети за счет повышения точности расчета и установки зоны нечувствительности регулятора положения позиционной системы, что улучшает энергетические показатели электродвигателей, повышает точность изготовления изделий и позволяет осуществить прокатку по минусовым допускам. Это дает возможность без дополнительных затрат
из одного и того же количества, металла получить большую длину полос.
Формула изобретения
Устройство для тепловой защиты электродвигателя по авт. св. № 765930, отличающееся тем, что, с целью повышения точности функционирования, в него дополнительно введены третий элемент сравнения и блок задания коэффициента эксцентриситета, выполненный в виде последовательно соединенных датчика эксцентриситета рабочих валков, измерителя среднеквадратичного отклонения эксцентриситета рабочих валков, третьего блока умножения, третьего блока деления, и задатчик коэффициента, выход которого подключен к второму входу третьего блока умножения, к второму входу третьего блока деления подключен выход измерителя среднеквадратичного отклонения управляющего воздействия, а его выход подключен к первому входу третьего элемента сравнения, выход которого подключен к входам первого и второго элементов сравнения, к второму входу третьего элемента сравнения подключен задатчик перегрузочной способности двигателя.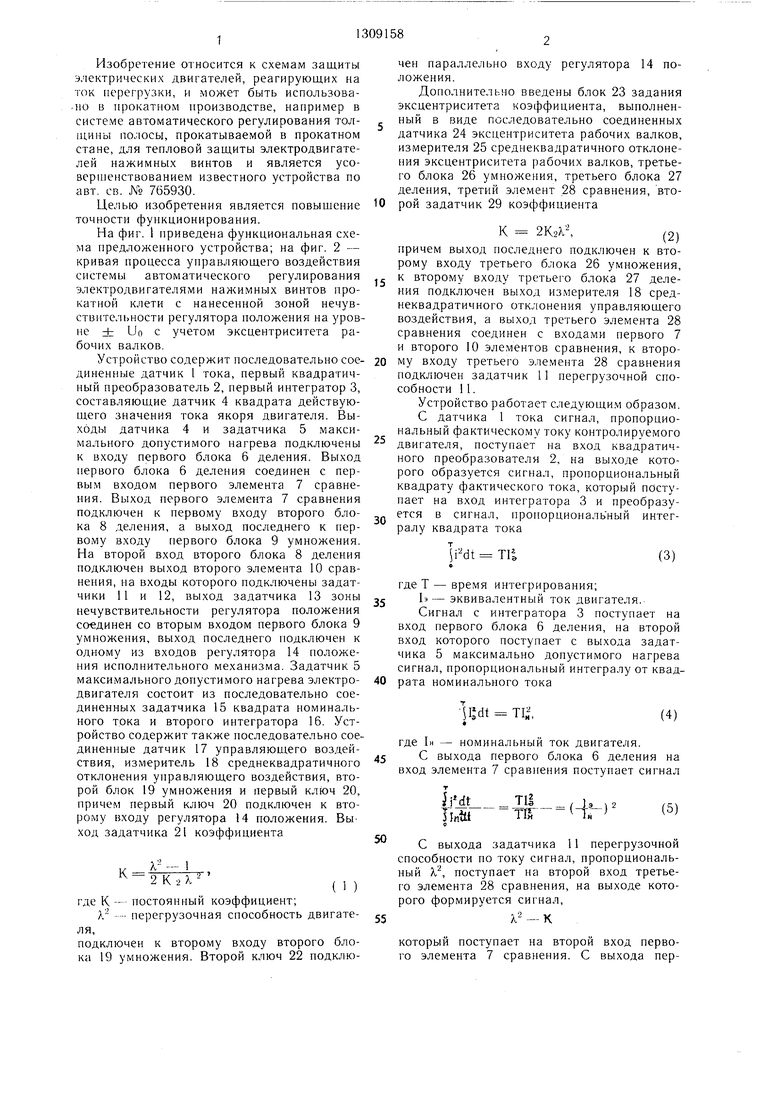
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для тепловой защиты электродвигателя | 1984 |
|
SU1229882A2 |
| Устройство для тепловой защиты электродвигателя | 1986 |
|
SU1372448A2 |
| Устройство для тепловой защиты электродвигателя | 1977 |
|
SU765930A2 |
| Устройство для тепловой защиты электродвигателя | 1987 |
|
SU1525801A1 |
| Устройство для тепловой защиты электродвигателя | 1977 |
|
SU675517A1 |
| Устройство для тепловой защитыэлЕКТРОдВигАТЕля | 1978 |
|
SU817846A1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2074503C1 |
| Устройство для тепловой защиты электродвигателя | 1978 |
|
SU714566A1 |
| Устройство для тепловой защиты электродвигателя | 1978 |
|
SU720611A1 |
| Электропривод переменного тока | 1982 |
|
SU1508337A1 |
Изобретение относится к электротехнике и предназначено для защиты электродвигателей от перегрузки. Целью изобретения является повышение точности функционирования. С датчика 1 тока сигнал, нропорциональный фактическому току контролируемого двигателя, поступает на вход квадратичного преобразователя 2. Далее этот сигнал интегрируется интегратором 3 и с него поступает на вход первого блока 6 деления, на второй вход которого поступает сигнал с выхода задатчика 5 максимально допустимого нагрева. В элементе 7 сравнения сигнал, поступивший с выхода блока 6 деления, сравнивается с сигналом, учитывающим перегрузочную способность по току и эксцентриситет рабочих валков прокатной клети. В блоке 9 умножения с выхода второго блока 8 деления сигнал перемножается с сигналом задатчика 13, про- порциональ ым заданной зоне нечувствительности. В регуляторе 14 положения устанавливается новая зона нечувствительности, при которой эквивалентный ток не превышает номинального, что удовлетворяет условию допустимого нагрева двигателя. 2 и. к (О (Л со о со ел оо го
.2
| Устройство для тепловой защиты электродвигателя | 1977 |
|
SU765930A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
