Изобретение относится к электротехнике, может быть использовано для защиты электрических двигателей реагирующих на ток перегрузки, и в прокатном производстве, например в системе автоматического регулирования толщины полосы, прокатываемой в прокатном стане, для тетовой защиты нажимных винтов.
Цель изобретения - повышение точности функционирования путем автоматической установки зоны нечувствительности регулятора положения исполнительного механизма.
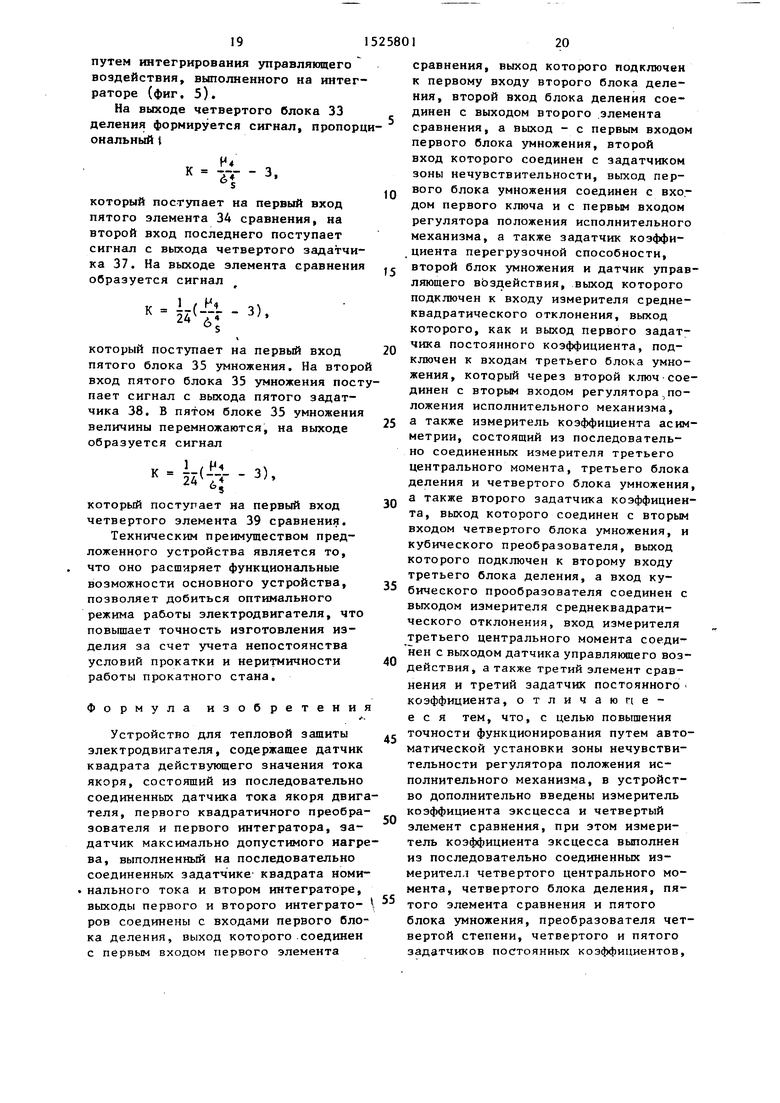
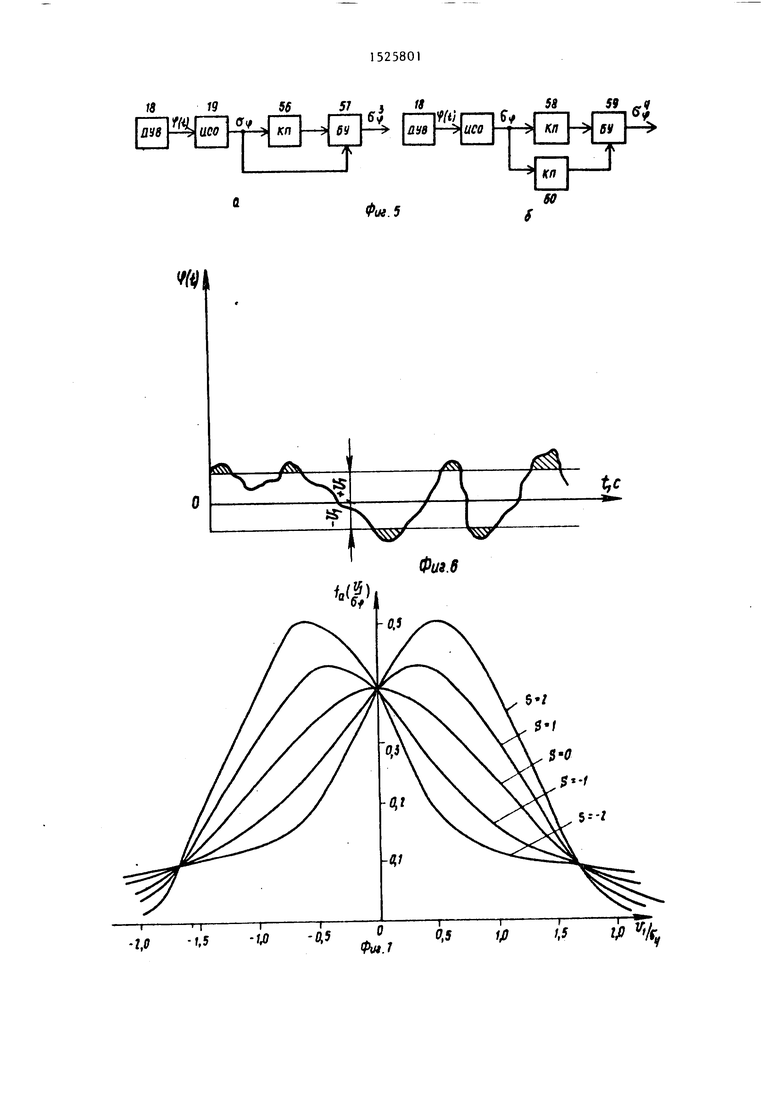
На фиг. 1 приведена функциональная схема предложенного устройства; на фиг. 2 - функциональная схема измерителя среднеквадратического отклонения управляющего воздействия; на фиг. 3 - функциональная схема измерителя третьего центрального момента; на фиг. 4 - функциональная схема четвертого центрального момента; на фиг. 5 - функциональные схемы преобразователей третьей и четвертой степени; на фиг. 6 - кривая процесса управляющего воздействия система автоматического регулирования электродвигателями нажимных винтов рабочей клети с нанесенной зоной нечувствительности регулятора положения на уровне tU,; на фиг 7 - график плотности распределения управляющего воздействия с учетом коэффициента
асимметрии f (--); на фиг. 8 -
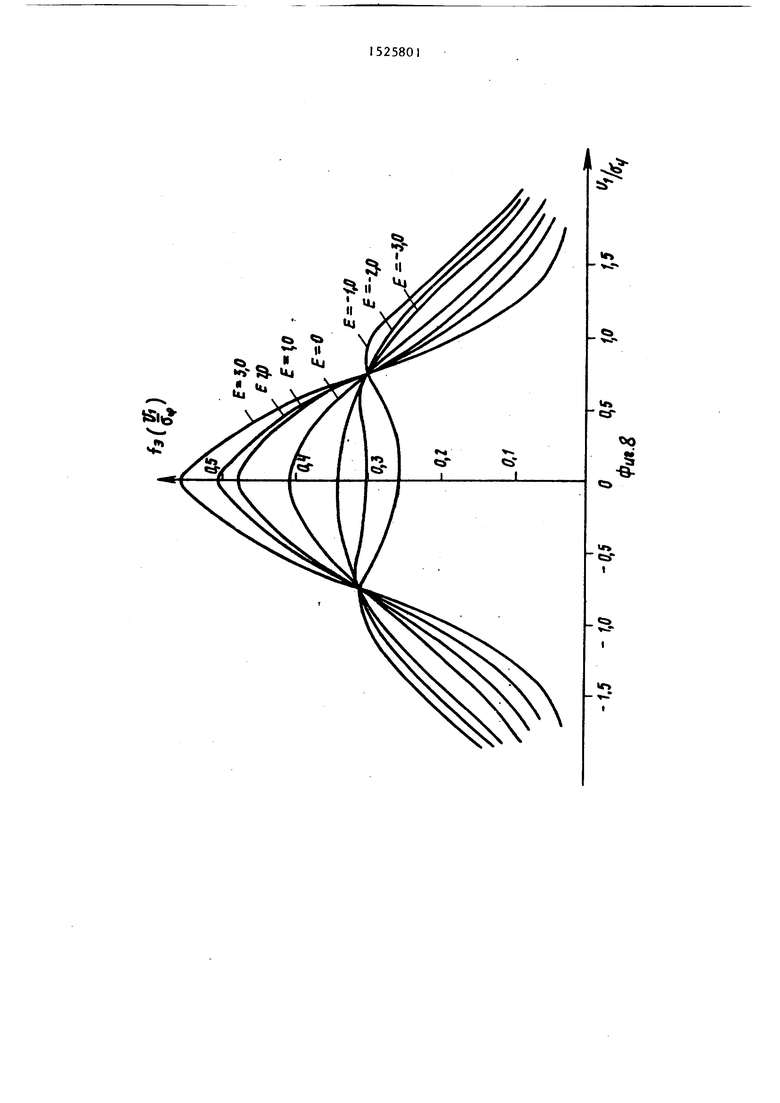
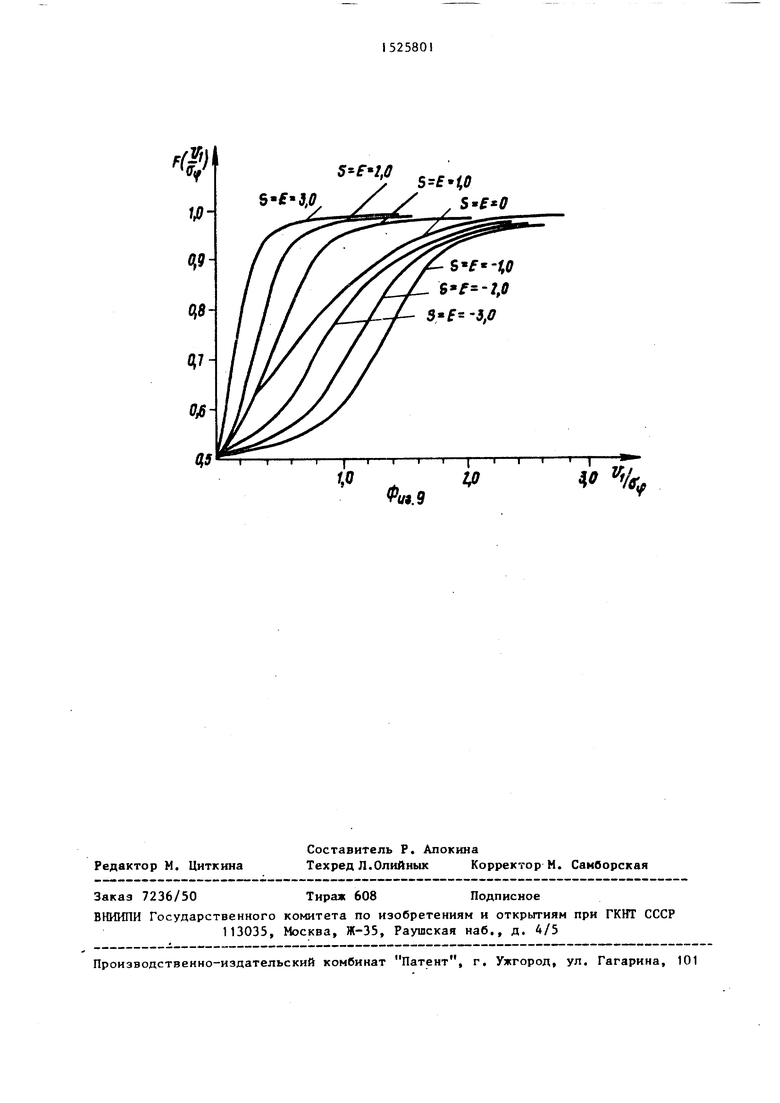
фик плотности распределения управляющего воздействия с учетом коэффициента эксцесса f (U, / dig); на фиг . 9- график функции распределения управляющего воздействия с учетом коэффициентов асимметрии и эксцессов F(U,/6J,
Устройство для тепловой защиты электродвигателя (фиг. 1) содержит датчик 1 квадрата действующего значения тока якоря двигателя, выполненный из последовательно соед1шен- ных датчика 2 тока, первого квадратичного преобразователя 3, первого интегратора 4. Задатчик 5 максимально допустимого нагрева вьшолнен из последовательно соединенных задат- чика 6 квадрата номинального тока и второго интегратора 7. Вькоды интегратора 4 и задатчика 5 подключены к входу первого блока 8 деления, выход которого соединен с первым
0
5
0
5
0
входом первого элемента 9 сравнения, выход последнего подключён к первому входу второго блока 10 деления. Выход второго блока 10 деления подключен к входу первого блока 11 умножения. На второй вход второго блока 10 деления подключен выход второго элемента 12 сравнения. Выход задатчика 13 коэффициента перегрузом-- ной способности подключен к первому входу второго блока 14 умножения, выход последнего подключен к вторьм .входам первого и второго элементов 9 и 12 сравнения. Выход задатчика 15 постоянного коэффициента подключен к первому входу второго элемента 12 сравнения о Вькод задатчика 16 зоны нечувствительности регулятора положения соединен с вторым входом первого блока 11 умножения, выход последнего подключен к одному из входов регулятора 17 положения исполнительного механизма
Выход датчика 18 управляющего воздействия подключен к входу измерителя 19 среднеквадратического отклонения, выход которого подключен к первому входу третьего блока 20 умножения, на второй вход которого подключен выход второго задатчика 21 постоянного коэффициента:
5
0
5
0
5
К
Выход третьего блока умножения 20 через второй ключ 22 подключен к од-, ному из входов регулятора 17 положения , первый ключ 23 подключен параллельно входу регулятора 17 положения. Выход датчика 18 управляющего воздействия также подсоединен к входу измерителя 24 коэффициента асимметрии.
Измеритель 24 коэффициента асимметрии выполнен из последовательно соединенных измерителя 25 третьего центрального момента, третьего блока 26 деления и четвертого блока 27 умножения о Выход измерителя 19 среднеквадратического отклонения соединен с кубическим преобразователем 28, вьтод которого подключен к второму входу третьего блока 26 деления. Выход второго задатчнка 29 коэффициента подключен к второму входу четвертого блока 27 умножения Выход измерителя 24 подключен к первому входу третьего элемента
30сраэнения. Выход задатчика 15 подключен к второму входу третьего элемента 30 сравнения.
Дополнительно введен измеритель
31коэффициента эксцесса, вьтолнен- ный из последовательно соединенных измерителя 32 четвертого центрального момента, четвертого Олока 33 деления, пятого элемента 34 сравнения и пятого блока 35 умножения. Выход измерителя 19 среднеквадра- тического отклонения подключен также к преобразователю 36 четвертой степени, выход которого подключен
к второму входу четвертого блока 33 деления. Выходы четвертого и пятого задатчиков 37 и 38 коэфс ициен- тов соединены соответственно с вторыми входами пятого элемента 34 сравнения и пятого блока 35 умножения. Выход третьего элемента 30 сравнения подключен к первому входу четвертого элемента 39 сравнения, второй вход которого соединен. с выходом блока 35. Вькод элемента 39 сравнения подключен к второму входу второго блока 4 умножения„
Измеритель 19 среднеквадратичного отклонения (фиг. 2) содержит последовательно соединенные с дат- чиком 18 управляющего воздействия шестой элемент 40 сравнения, второй квадратический преобразователь 41, третий интегратор 42 и блок 43 извлечения квадратного корня. Выход датчика 18 управляющего воздействия через четвертый интегратор 44 соеди нен с вторым входом шестого элемента 40 сравнения.
Измеритель третьего центрального момента (фиг. З) состоит из последовательно соединенных и подключенных к датчику 18 управляющего воздействия седьмого элемента 45 сравнения, третьего квадратичного преобразователя 46, шестого блока 47 умножения и пятого интегратора 48; выход датчика 18 управляющего воздействия через шестой интегратор 49 подключен к второму входу седьмого элемента 45 сравнения, выход которого соединен с вторым входом шестого блока 47 умножения.
Измеритель четвертого центрального момента (фиг. 4) состоит из последовательно соединенных и подключенных к датчику 18 управляющего
10
15
525801
воздействия восьмого элемента 50 сравнения, четвертого квадратичного преобразователя 51, седьмого бггока 52 умножения, седьмого интегратора 53; выход датчика 18 управляюшего воздействия чере-з восьмой интегратор 54 соединен с вторым входом восьмого элемента 50 сравнения, выход которого через пятьш :над- ратнчный преобразователь 55 соединен с вторым входом седьмого блока 52 умножения.
Преобразователь третьей степени (фиг. 5а) состоит из последовательно соединенных и подключенных к последовательно соединенным датчику
18управляющего воздействия и ит- мерителю 19 среднеквадратического
20 oтKJIO ieния шестого квадратичного преобразователя 56 и восьмого Олока 57 умножения, выход и- меригеля
19среднеквадратического отклонения соединен с вторым входом мого блока 57 умножения.
Преобразователь четвертой степени (фиг, 56) состоит из последовательно соединенных и подк.г и ченных к последовательно соедипе П ым дат- 30 чику 18 управляющего воздетйстния и измерителю 19 средне1 :ваг;рпт1|чес- кого отклонения седьмого кр.лдрати- ческого преобразователя 58 и де5 я.и)- го блока 59 умножения, в:.1ход измерителя 19 cpeднeквaдpaт гчf; cт oгo отклонения 19 через восьмой кплдрл-- тический преобразователь 60 iio;.iK. чен к второму входу девятого блока 59 умножения.
лп Устройство работает след тицим (lO- разом.
С выхода датчика 1 эффективного значения тока якоря двигателя сигнал, пропорциональный квадрату фак- tcL тического тока, формируется датчиком 2 тока, поступает на вход квадрати- ческого преобразователя 3 и интег- рируюо1его устройства 4, на выходе которого формируется сигнал, проел порциональный интегралу квадрлта тока:
(2)
35
idt TI
55
где Т - время интегрирования.
С выхода задатчика 5 максимально допустимого нагрева формируется rui- |нал задатчиком 6 квадратл номинального тока и вторым интегратором 7,
пропорциональный интегралу от квадрата номинального тока: Т
ii dt TlJ,
(3)
где Т - время интегрирования.
Сигнал с выхода эадатчика 5 поступает на второй вход первого блока 8 деления, с выхода датчика 1 эффективное значение тока поступает на первый вход первого блока 8 деления, С выхода первого блока 8 .деления на первый вход первого элемента 9 сравнения поступает сигнал
о
I
(4)
о
На первый вход второго блока 10
деления пост тгает сигнал с выхода первого элемента сравнения 9, равный
К Д (1 - К, - к,) - (Ь). (5)
С выхода второго блока 10 делени формируется сигнал, пропорциональны делению двух величин:
К .(, (6)
д( - к,- к,) - ()
н
который поступает на первый вход первого блока 11 умножения. На вто- рой вход второго блока 10 деления поступает сигнал с выхода второго элемента 12 сравнения, равный:
К (1 - Кз - Kj - 1.
(7)
с выхода задатчика 13 коэффициента перегрузочной способности двигателя К Л поступает на первый вход второго элемента 14 сравнения, на второй вход которого поступает сигнал с выхода четвертого элемента сравнения, равный:
К 1 - Кз - К.
Во втором блоке 14 умножения величины Л и (1 - К 3 - К) перемножаются и формируется сигнал
К А(1 - Кз - К),
который поступает на второй вход первого элемента 9 сравнения и
первый вход второго элемента 12 сравнения. Сигнал, пропорциональный единичной функции с выхода первого задатчика 15, поступает на второй вход второго элемента сравнения,
В системах автоматического управления блоки сравнения представляют собой, как правило (в большинстве случаев),алгебраические сумма-, торы нескольких входных величин.
На второй вход блока 11 умножения поступает сигнал с выхода задатчика 16 зоны нечувствительности, пропорциональный заданной зоне не- чуйствительности U, Указанные величины перемножаются в блоке 11 умножения, и с выхода последнего на вход коррекции регулятора 17 положения поступает сигнал, пропорциоь льный величине скорректированной зоны нечувствительности U2 :
;(1 - Кэ- К+) - 1
и,
Г(1 - к,- K,)-(i2)
J II
и, , (8)
J м
в регуляторе 17 положения устанавливается новая зона нечувствительности и, при которой эквивалентный ток двигателя не превышает номинального, что Удовлетворяет условию допустимого нагрева.
Начальная зона нечувствительности позиционного регулятора U, характеризуется зависимостью (l).
2 I
Ж-
(9)
где Л - перегрузочная способность
двигателя по току; Kj - постоянный коэффициент, KI 0,35;
45
0
5
DCs - дисперсия случайного процесса управляющего воздействия,
С датчика 18 управляющего воздействия сигнал, соответствующий управляющему воздействию S(t), поступает в измеритель 9 среднеквадратического отклонения. Сигнал, пропорциональный среднеквадратическому отклонению управляющего воздействия, формируется согласно выражениям (5), (6),
рт I
6s4f ) - S(t)-dt. (10) 1 п
91525801
S(t) - случайное управляющее
воздействие;
S{t) - среднее значение случайного управляющего возИз
I
i S(t) - SU ) dt, (13)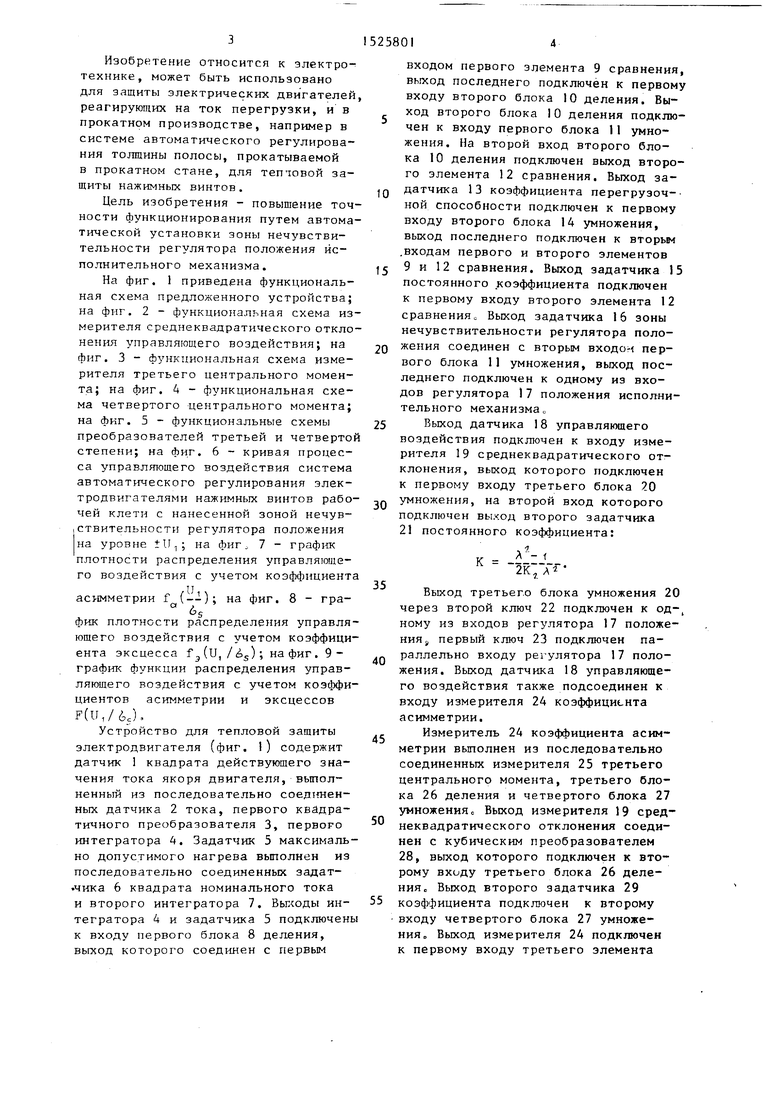


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для тепловой защиты электродвигателя | 1986 |
|
SU1372448A2 |
| Устройство для тепловой защиты электродвигателя | 1984 |
|
SU1229882A2 |
| Устройство для тепловой защиты электродвигателя | 1985 |
|
SU1309158A2 |
| Устройство для тепловой защиты электродвигателя | 1977 |
|
SU765930A2 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| УСТРОЙСТВО ОЦЕНКИ СРЕДНЕЙ ПО СТАДУ ЖИВОЙ МАССЫ ЖИВОТНОГО ИЛИ ПТИЦЫ ПРИ СЛУЧАЙНОМ ВЫБОРОЧНОМ ВЗВЕШИВАНИИ ПРОИЗВОЛЬНОЙ ОСОБИ СТАДА | 2013 |
|
RU2572324C2 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОЙ ОЦЕНКИ СРЕДНЕЙ ПО СТАДУ ЖИВОЙ МАССЫ ЖИВОТНОГО ИЛИ ПТИЦЫ ПРИ СЛУЧАЙНОМ ВЫБОРОЧНОМ ВЗВЕШИВАНИИ ПРОИЗВОЛЬНОЙ ОСОБИ СТАДА ЖИВОТНЫХ ИЛИ ПТИЦЫ | 2013 |
|
RU2572531C2 |
| Адаптивная система контроля и регулирования | 1982 |
|
SU1070507A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК СЛУЧАЙНЫХ ПРОЦЕССОВ | 1995 |
|
RU2110806C1 |
| Устройство для тепловой защитыэлЕКТРОдВигАТЕля | 1978 |
|
SU817846A1 |
Изобретение относится к электротехнике. Цель изобретения - повышение точности функционирования путем автоматической установки зоны нечувствительности регулятора положения исполнительного механизма. Поставленная цель достигается тем, что в устройство дополнительно введены измеритель 31 коэффициента эксцесса и четвертый элемент сравнения 39. Измеритель коэффициента эксцесса выполнен из последовательно соединенных измерителя 32 четвертого центрального момента, четвертого блока деления 33, пятого элемента сравнения 34 и пятого блока умножения 35, а также преобразователя четвертой степени 36, четвертого 37 и пятого 38 задатчиков постоянных коэффициентов. Выход преобразователя четвертой степени 36 соединен со вторым входом четвертого блока деления 33, а выходы четвертого 37 и пятого 38 задатчиков постоянных коэффициентов подключены соответственно ко вторым входам пятого блока сравнения 34 и пятого блока умножения 35. Выход пятого блока умножения 35 подключен к первому входу четвертого элемента сравнения 39, ко второму входу которого подключен выход третьего элемента сравнения 30, а выход элемента сравнения 39 соединен со вторым входом второго блока умножения 14. 9 ил.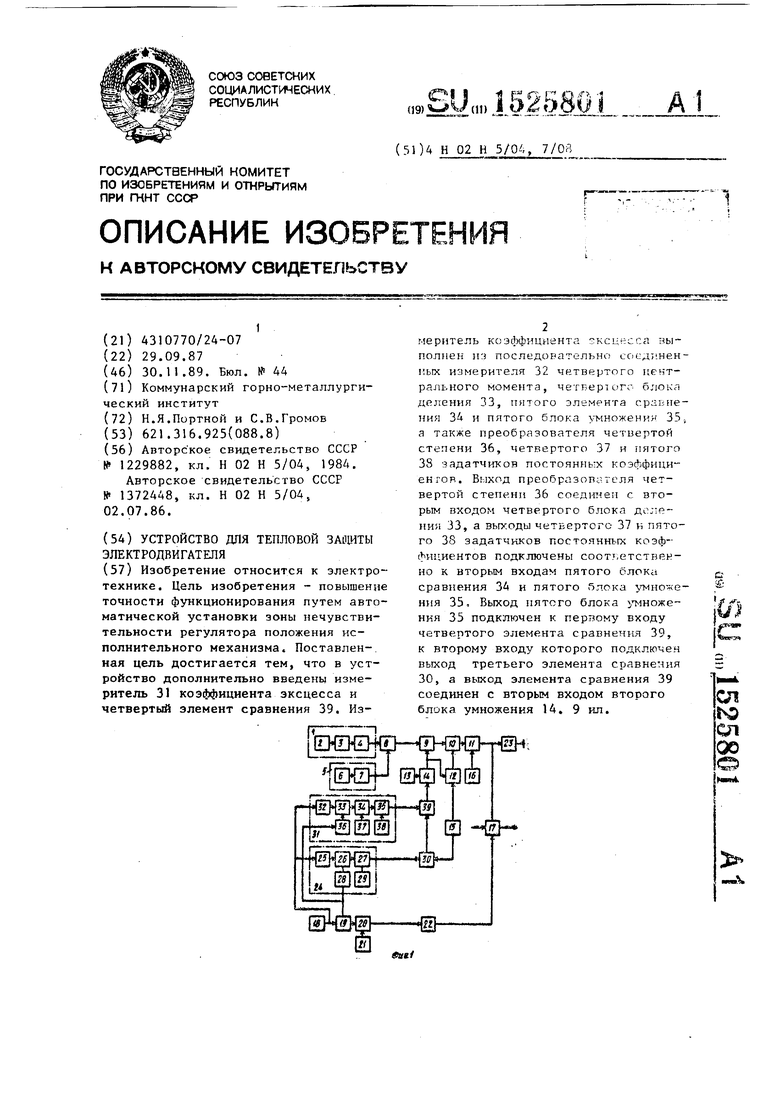
действия.
Сигнал S(t) формируется согласно выражениям (5), (6) путем интегрирования сигнала S(t) и формируется на стандартных блоках (фиг. 2).
С выхода измерителя 19 средне- квадратического отклонения сигнал, пропорциональный бд, поступает на первый вход третьего блока 20 умножения, на второй вход которого пост
умножения .д перемножаются, блока 20 через ключ 17
пает сигнал с выхода задатчика 21 коэффициента, величина которого определяется следующим образом:
( 2)
В третьем блоке 20 величины К и 6 С выхода
22 на вход регулятора I/ положения поступает сигнал U, Кбд-, пропорциональный такой зоне нечувствительности, при установке которой в результате положения позиционной системы электродвигателя нажиных винтов рабочей клети будут работать в режиме, обеспечивающем равенство эквивалентного и номинального токов двигателя. После установки U, ключ 22 отключает цепь расчета начальной зоны нечувствительности, а ключ 23 подключается на вход р1згуля тора цепи управления.
Так как управляющее воздействие S(t) на входе регулятора 17 положения является стационарным случайным процессом, близким к номинальному, то при формировании зоны нечувствительности регулятора 17 положения в зависимости от коэффициентов асимметрии и эксцесса можно оценивать степень приближения действительного закона распределения случайного управляющего воздействия к нормальному.
Сигнал с выхода датчика 18 управляющего воздействия S(t) поступает на вход измерителя 24 коэффициента асимметрии. С выхода измерителя 25 третьего центрального момента формируется сигнал, пропорциональный третьему центральному моменту случайного управляющего воздействия (5), (8), согласно выражению
где S(t) - случайное значение управляющего воздействия; Т - время интегрирования. Сигнал с выхода измерителя 24 коэффициента асимметрии формируется на стандартных блоках. С вьтхода измерителя 25 третьего центрального момента на первый вход третьего блока 26 деления поступает сигнал,
К рз (t) - S(t) -dt.
(14)
На его второй вход поступает сигнал с выхода кубического преобразователя 28, на выходе которого формируется сигнал
25
К 6,
14)
С выхода третьего блока 26 деле 3ния сигнал К -,6
поступает на вход
четвертого блока 27 умножения. На второй вход последнего поступает также выход третьего задатчика коэффициента К 1/6 29. На выходе измерителя 24 коэффициента асимметрии формируется сигнал
35
К i . -li 3 6 3.
(15)
который поступает на вход третьего элемента 30 сравнения, на второй вход которого поступает выходной сигнал с первого задатчика 15 коэффициента, На выходе третьего элемента 30 сравнения величины Кз и 1 сравниваются:
К 1 - К, (16)
Сигнал с выхода элемента 30 сравнения поступает на первый вход четвертого элемента 39 сравнения, с выхода которого сигнал, пропорциональный
1 - КзК
4
(17)
поступает на второй вход второ1 о блока 14 умножения.
С датчика 18 управляющего воздействия поступает сигнал, близкий к нормальному. При установке яоны не11
чувствительности регулятора 17 положения в зависимости от коэффициентов асимметрии и эксцесса можно оценивать степень приближения действитель ного закона случайного управляющего воздействия к нормальному. Нагрузочная диаграмма электродвигателей нажимных винтов, рабочей клети, показанная на фиг. 6, формируется в соответствии с управлякяннм воздействием S(t), Зона нечувствительности регулятора 17 положения обозначена iU,. В действительности закон рйс- пределения случайного управляющего воздействия S(t) имеет различные коэффициенты асимметрии и эксцесса. Поэтому для достижения условий, при которых номинальный ток двигателя Ijj равен эквивалентному Ij, необходимо вьтолнить следующее неравенство:
и.
1 д(1 - к,- к,) ЛЬ
(18) де 1ц - номинальный ток двигателя;
Ij - эквивалентный ток двигателя ;
- перегрузочная способность двигателя по току;
U- - установленная (начальная)
зона нечувствительности регулятора положения;
и - скорректированная зона нечувствительности регулятора положения;
К,. - коэффициент асимметрии.
К,
, ,, Мг 1/6 ,-;
Hj
- 5 S(t) - S(t) dt;
К4 - коэффициент эксцесса; К, l/24( 3);
г
р, 5 S(t) - S(t)dt;
о
Ml М4 ретий и четвертый центральные моменты случайного уп-. равляющего воздействия;. (PC; - среднеквадратическое отклонение случайного управляющего воздействия.
Сигнал с выхода измерителя 32 четвертого центрального момента формируется -с помощью стандартных блоков (фиг. 3,4).
525801 2
Задатчики коэффициентов блоков 13,15, 21, 29, 37, 38 вьшолняются на стандартных операционных усилителях. 5
и
В«.1Х
- Кивх .
где К - коэффициент усиления.
Зависимость (18) получена следующим образом.
Зависимость количества пусковых циклов и величины эквивалентного тока двигателей нажимных вт1тов рабочей клети от величины зоны нечувствительности позиционного регулятора соответствует среднему числу пересечений стационарного нормального случайного процесса с нулевым средним на единицу времени на уровне с
заданным знаком производной, и,
А,(1,)
(19)
где А,- среднее число пересечений стационарного нормального случайного процесса с нулевым средним в единицу времени на уровне U, с заданным знаком производной; i - среднеквадратическое отклонение случайного управляющего воздействия; 6(j- среднеквадратическое отклонение производной случайного управляющего воздействия ,
Среднее число пересечений стационарного нормального случайного процесса с нулевьм средним под уровнем tUi за время Тц равно:
. 1Г (БШ .
(20)
ГД
D(S) дисперсия случайного управляющего воздействия;D(U)) - дисперсия производной
случайного управляющего воздействия,
Средние длительности выбросов стационарного нормального случайного процесса равны (6):
2T,l - (У1) jtg ,
(21)
где п J -- среднее число выбросов стационарного нормального слу13
чайного процесса с нулевым средним под уровнем tu, за время Тц;
F(x) -1- i Е
Тэт -
dt;
h
F(X) - интеграл Лапласа;
-W
4tjd ,
JiL
dt,
,и.
FU(--) - функция распределения
S стационарного нормального случайного процесса. Средняя продолжительность пребывания процесса под уровнем tU, равна:
Tg 2 Т, l - F(Hi)j. (22)
Как показывают известные исследования, закон распределения разног толшинности прокатываемой полосы близок к нормальному закону распределения. Геометрические параметры, определяющие точность тонколистового проката, изменяются, от полосы к полосе, от листа к листу в связи с непостоянством условий прокатки и неритмичностью работы прокатываемого стана. Эти изменения носят случайный характер, тогда качество проката можно характеризовать математическим ожиданием, среднеквадрати- ческим отклонением (дисперсией), асимметрией (скошенностью) и эксцес25
30
35
четвертый центральный момент случайного управляющего воздействия: г
М4 f S - S) dt.
о
Процесс нагружения электродвигателей нажимных винтов рабочей клети близок к нормальному стационарному случайному процессу, его плотность распределения в большинстве случаев является унимодальной и ветви по обе стороны от вершины достаточно быстро приближаются к нулю при возрастании абсолютного значения аргумента. Такие плотности вероятности удобно аппроксимировать с помошью полиномов
сом (крутостью или островершинностью) 40 Эрмита. Плотность распределения случайного управляющего воздействия можно представить в виде ряда Эджвор- та, который состоит из полиномов Эрмита. С достаточной для практики точностью в ряде Эджворта можно учитывать только три первых слагаемых:
распределения толщины прокатываемого металла.
. Асимметрия и эксцесс плотности распределения случайного управляющего воздействия характеризуются коэффициентами асимметрии и эксцесса:
S - 7Т
(23)
де S - асимметрия плотности распределения управляющего воздействия;
среднеквадратическое отклонение управляющего воздействия;
третий центральный момент случайного управляющего воздействия;
6 Р5
1525801
РЭ- 1 (t) - S(t)J dt, о
S(t) - случайное управляющее
воздействие;
S(t) - среднее значение случайного управляющего воэдей10
ствия;
s(t) 15 s(t).dt,
5
Т - время интегрирования; 3 ,
(24)
0
5
0
5
Е .- .
1
где Е - коэффициент эксцесса случайного управляющего воздействия;
6g - среднеквадратическое отклонение управляющего воздействия;
четвертый центральный момент случайного управляющего воздействия: г
М4 f S - S) dt.
о
Процесс нагружения электродвигателей нажимных винтов рабочей клети близок к нормальному стационарному случайному процессу, его плотность распределения в большинстве случаев является унимодальной и ветви по обе стороны от вершины достаточно быстро приближаются к нулю при возрастании абсолютного значения аргумента. Такие плотности вероятности удобно аппроксимировать с помошью полиномов
Эрмита. Плотность распределения слу
чайного управляющего воздействия можно представить в виде ряда Эджвор- та, который состоит из полиномов Эрмита. С достаточной для практики точностью в ряде Эджворта можно учитывать только три первых слагаемых:
f(Ui) f,(Hl)v
65 65
4
(Hi ir
rUf
г.Н.
(25).
где f(--) - нормальная плотность f
распределения случайного управляющего воздействия; .1 1
г
5
151525801
S - коэффициент асимметрии рас- - пределения управл5пошего воздействия;
Е - коэффициент эксцесса распределения управляющего воздей, ствия;
) ) полиномы Эрмита,
«5 6s
Г6
и,
« К + 77 г Дв К, и К, - постоянные
s коэффициенты, К 0,5; Ki 0,35.
Преобразуем выражение (28) в виде nf)(4):
.-(iV-3,} ,зо ,
Для подтверждения выражения (28) были построены графики функций плотностей (фиг. 7,8) при различных коэфч.,п. -. u..yna«n,- ,5 асимметрин И эксцесса и го управляющего воздействия опреде- функции распределения (фиг. 9) с по- ляется по формулемощью выражений (25) и (28). Из
и,/6s
(26)
Н(1) (Н.) . 3(Hl).
3 6s 65 S
H,(Hl) (л) - 6(1) + 3. . 6s 65 65
Функция распределения случайно10
F(UM f(bdu.
фиг. 8 видно, что при различных
значениях - 1 и различных коэф- 65
где f(--) - плотность распределения S случайного управляющего
воздействия.
Подставим выражеиие (25) в (26), получим
и,/6s
tM-f«s(:
. fH,(H.)du.
) +
(27).
6s
или, проинтегрировав, получим
р(Ь, Г.(|.)(, .)(28)
1
при условии, что -- 1, что практи sчески выполняется всегда для систем
автоматического регулирования,
где РИ(--) - функция распределения нормального стационарного случайного процесса;
S - коэффициент асимметрии; 45 т «р Г2-( 1+2IC,--) Е - коэффициент эксцесса. в
50
Е --.- - 3,
U,/ds
S H(;)t;
- СО
нормальная плотность
распределения случайного
управляющего воздействия. 55 ируем функцию распредеrU,
Д1
,ления F(--) зависимостью Р„(--)
Г6
и,
асимметрин И эксцесса функции распределения (фиг. 9) с мощью выражений (25) и (28). Из
фиг. 8 видно, что при различных
значениях - 1 и различных коэф- 65
фициентах S и Е функция распределения F(--) сохраняет линейный харак&S
тер, В связи с этим функцию распре- деления можно аппроксимировать зависимостью {28).
Подставляя выражения (ЗО) в (22), получим
VZTji -(к,+ к,Нм(.
k(.
24 6
(31)
где
6д - среднеквадратическое
отклонение управляющего воздействия;
U-, третий и четвертый центральные моменты случайного управляющего воздействия;
К,, К5 - постоянные коэффициента, К, 0,5; Кг 0,35. Учитьшая коэффициенты К, и К, получим
.(32)
50
Эквивалентый ток двигателя нажимного винта рабочей клети определяется согласно выражению (П):
(33)
где I - пусковой ток двигателя; Тц - время цикла; Tj - время включения двигателя.
17TB ngfltg,
число включений за время Т ; средняя продолжительность включения двигателя;
Ь н
Д - перегрузочная способность
двигателя по току; I и - иомииальный ток двигателя.
/
Тогда выражение (33) запишем в следующем виде:
I, Д1„
(34)
Преобразуем выражение (34), получим:
- Т (Ь.)
(35)
В тех случаях, когда эквивалентный ток двигателя превьш1ает номинальный, что может привести к недопустимому нагреву электродвигателя , необходимо воздействовать на настроечные параметры системы автоматического регулирования толщины полосы так, чтобы выполнялось условие
н«
I
Допустим I э,71„, тогда I
Э I
Д 1„ J и необходимо уменьщить
-ц
продолжительность включения двигателя.
Приравнивая выражения (35) и (31), получим:
-,1 Кз К,)
бд
- 3 - к.- (f;-)
Из полученньк соотнощений после несложных преобразований получнм, что для выполнения неравенства I Тц при I,, 7 If, необходимо вьтол- нять неравенство
А(1 - Кз- К,) - 1
и, -----------.
А (1 - Кз- К,) -(-) (37)
Ij - эквивалентный ток двигателя;
IH номинальный ток двигателя;
Л - перегрузочная способность двигателя по току;
10
If, и, К, |8
установленная зона нечувствительности регулятора положения;
скорректированная зона нечувствительности регулятора положения, при Которой эквивалентный ток двигателя не превышает номинального; коэффициент асимметрии, Из
Кз (1/6)
С) с
5
0
5
0
5
0
Кэ - 5К4
к.
третий центральный момент случайного управляющего воздействия;
среднеквадратическое отклонение управляющего воздействия;коэффициент эксцесса,
f
р4 четвертьй центральный момент случайного управляющего воздействия. С датчика 18 сигнал, соответствующий управляющему воздействию S(t), поступает на вход измерителя 31 коэффициента эксцесса, С выхода измерителя 32 четвертого центрального момента формируется сигнал (фиг. 8) т
к К. I l(s(t} - s(T)j dt,
(38)
где S(t) - случайное управляющее
. воздействие;
S(t) - среднее значение случайного управляющего воздействия.
S(t) 1J S(t)-dt;
Т - время интегрирования, поступает на первый вход третьего блока 33 деления, на второй вход которого поступает сигнал с выхода преобразователя 36
К d .
Сигнал с выхода преобразователя 36 четвертой степени формируется путем возведення d в четвертую степень. Преобразователь 36 формируется на стандартных блоках
55
К
г .1 .,4 - s
Среднее значение случайного управляющего воздействия формируется
путем интегрирования управляющего воздействия, вьшолненного на интеграторе (фиг. 5).
На выходе четвертого блока 33 деления формируется сигнал, пропорциональный t
К
1 d 3.
который поступает на первый вход пятого элемента ЗА сравнения, на второй вход последнего поступает сигнал с выхода четвертого задатчика 37. На выходе элемента сравнения образуется сигнал
1 А Р4
1-ГЛ1 3)
6;
24
который поступает на первый вход пятого блока 35 умножения. На второй вход пятого блока 35 умножения поступает сигнал с выхода пятого задатчика 38. В пятом блоке 35 умножения величины перемножаются, на выходе образуется сигнал
К - i-f 3 - 3),
который поступает на первый вход четвертого элемента 39 сравнения.
Техническим преимуществом предложенного устройства является то, что оно расширяет функциоиапьные возможности осиовного устройства, позволяет добиться оптимального режима работы электродвигателя, что повышает точность изготовления изделия за счет учета непостоянства условий прокатки и неритмичиости работы прокатного стана.
Формула изобретения
.
Устройство для тепловой зашиты электродвигателя, содержащее датчик квадрата действующего зиачения тока якоря, состоящий из последовательно соединенных датчика тока якоря двигателя, первого квадратичного преобразователя и первого интегратора, эа- датчик максимально допустимого иагре ва, выполненный на последовательно соединенных задатчике квадрата номинального тока и втором интеграторе.
выходы первого и второго интеграто ров соединены с входами первого блока деления, выход которого .соединен с первым входом первого элемента
.
10
20
30
35 40
д -
50
I 55
сравнения, выход которого подключен к первому входу второго блока деления, второй вход блока деления соединен с выходом второго элемента сравнения, а выход - с первым входом первого блока умножения, второй вход которого соединен с задатчиком зоны нечувствительности, выход первого блока умножения соединен с входом первого ключа и с первым входом регулятора положения исполнительного механизма, а также задатчик коэффициента перегрузочной способностн, второй блок умножения и датчик управляющего воздействия, выход которого подключен к входу измерителя средне- квадратического отклонения, выход которого, как и выход первого задат- чика постоянного коэффициента, подключен к входам третьего блока умножения, который через второй ключ соединен с вторым входом регулятора,положения исполнительного механизма, а также измеритель коэффициента асимметрии, состоящий из последовательно соединенных измерителя третьего центрального момента, третьего блока деления и четвертого блока умножения, а также второго задатчика коэффициента, выход которого соединен с вторым входом четвертого блока умножения, и кубического преобразователя, выход которого подключен к второму входу третьего блока деления, а вход кубического прообразователя соединен с выходом измерителя среднеквадрати- ческого отклонения, вход измерителя третьего центрального момента соединен с выходом датчика управляющего воздействия, а также третий элемент сравнения и третий задатчик постоянного коэффициента, отличаю пе- е с я тем, что, с целью повышения точности функционирования путем автоматической установки зоны нечувствительности регулятора положения исполнительного механизма, в устройство дополнительно введены измеритель коэффициента эксцесса и четвертый элемент сравнения, при этом измеритель коэффициента эксцесса выполнен из последовательно соединенных из- мерителл четвертого центрального момента, четвертого блока деления, пятого элемента сравнения и пятого блока умножения, преобразователя четвертой степени, четвертого и пятого задэтчиков постоянных коэффициентов.
выход преобразователя четвертой степени соединен с вторым входом четвертого блока делания, а выходы четвертого и пятого эадатчиков постоянных коэффициентов соединены соответственно с вторым входом пятого блока сравнения и пятого блока умножения, вход измерителя четвертого центрального момента, являющийся входом измерителя коэффициента эксцесса, соединен с выходом датчика управляющего воздействия, вход преобразователя четвертой степени соединен с выходом измерителя среднеквадратнческого отклонения, а выход пятого блока умножения, являющийся выходом измерителя коэффициента эксцесса, соединен с первьм входом четвертого элемента
18
40
49
18
54
сравнения, второй вход которого соединен с выходом третьего элемента сравнения, первый вход которого подключен к выходу четвертого блока умножения, а второй вход - к выходу третьего задатчика постоянного коэффициента, второй выход третьего задатчика коэффнциента соединен с вторым входом второго элемента сравнения, задатчик коэффициента перегрузочной способности соединен с первым входом второго блока умножения, второй вход второго блока умножения соединен с выходом четвертого элемента сравнения, а выход его - с вторыми входами первого и второго элементов сравнения.
Vf
VZ
Физ.5
SO
51
52
SS
Фиг. /
nfS
V
1,0 -f.5-W 0,5 0.5Ifl1.5IJO V./f
Фаг.5
SO
t,c
/
.о
| Устройство для тепловой защиты электродвигателя | 1984 |
|
SU1229882A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для тепловой защиты электродвигателя | 1986 |
|
SU1372448A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
