СА9
ьо
4 4
СХ)
Изобретение относится.к схемам защиты электрических двигателей,реагирующих на ток перегрузок, может быть использовано в йрокатном производстве, например в системе автоматического регулирования толщины полосы, прокатываемой в прокатном стане,для тепловой защиты электродвигателей нажимных винтов, и является усовершенствованием изобретения по авт.св. № 765930.
Цель изобретения - повышение точности функционирования путем автоматической установки зоны нечувствительности регулятора положения исполнительного механизма.
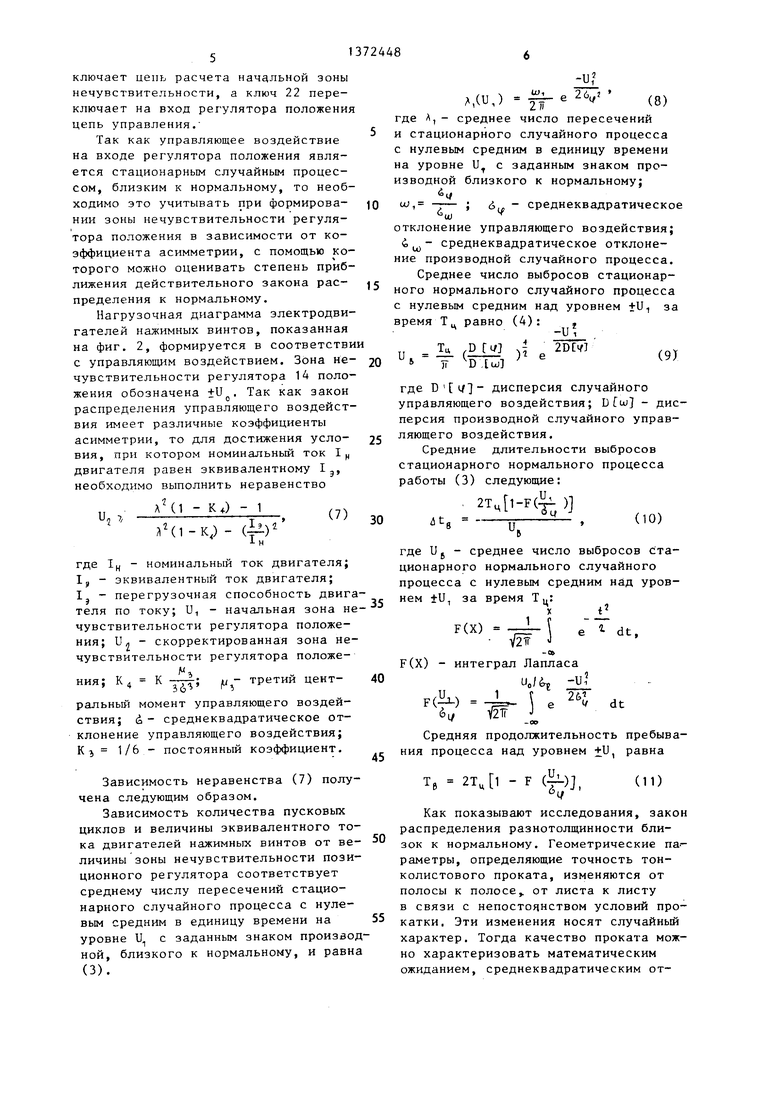
На фиг. 1 приведена функциональная схема предлагаемого устройства; на фиг..2 - кривая процесса управляющего воздействия системы автоматического регулирования электродвигателями нажимных винтов прокатной клети с нанесенной зоной нечувствительности регулятора положения на
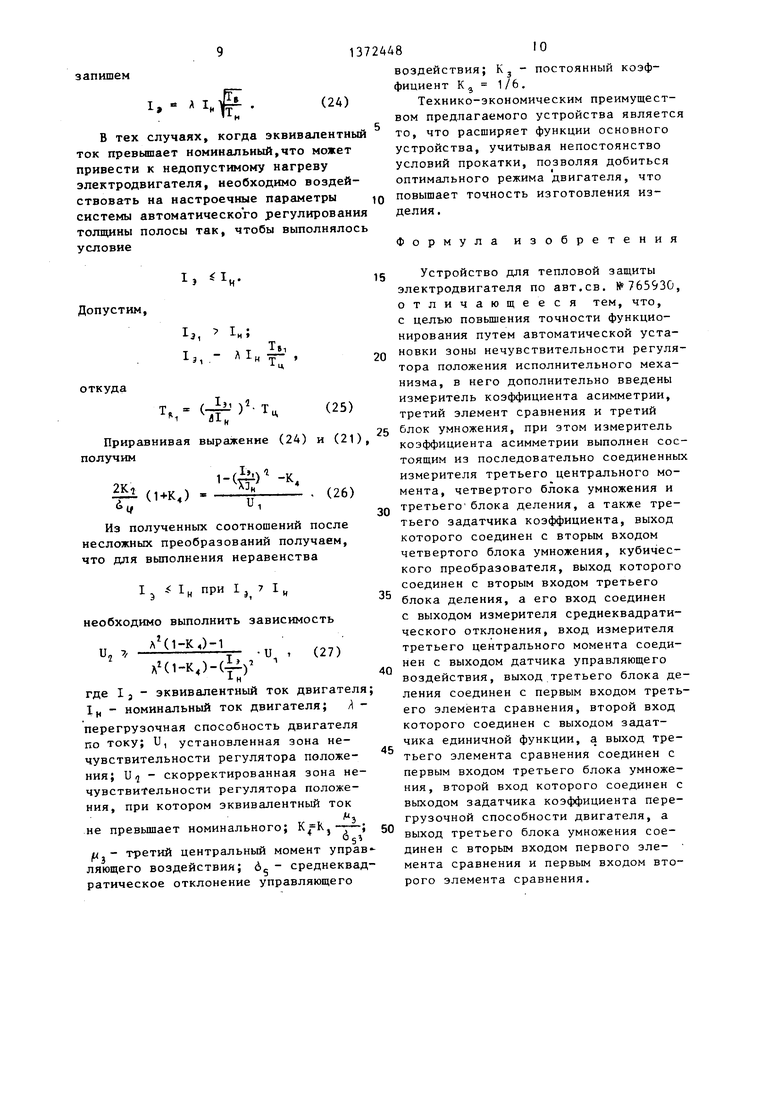
уровне +и ; на фиг.З - график плотности распределения f (-) ; на фиг. А и,
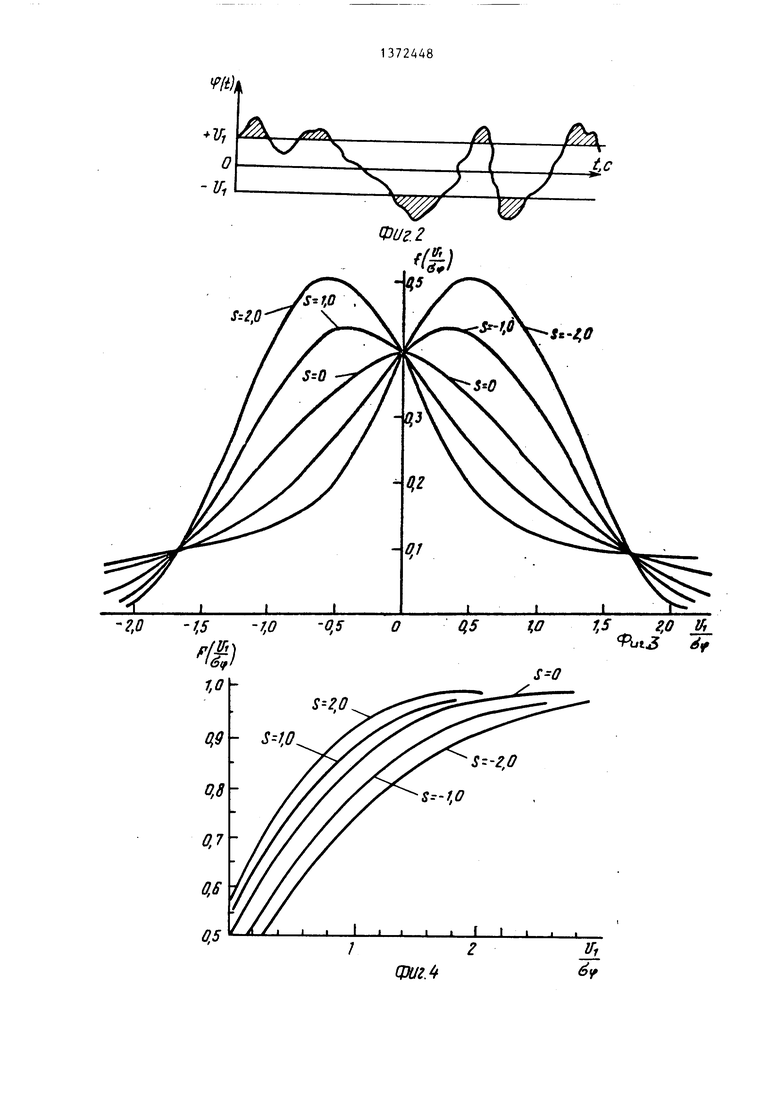
график функции распределения ),
где и - начальная зона нечувствительности регулятора положения; среднеквадратичное отклонение случай jHoro управляющего воздействия.
Устройство содержит последовательно соединенные датчик 1 тока, первый квадратичный преобразователь 2, первый интегратор 3, составляющие датчик 4 квадрата действующего значения тока якоря двигателя. Выходы датчика 4 и задатчика 5 максимально допустимого нагрева подключены к входу первого блока 6 деления, выход которого соединен с первым входом первого элемента 7 сравнения, выход последнего подключен к первому входу второго блока 8 деле- ния. Выход второго блока В деления подключён к входу первого блока 9 умножения. На второй вход второго блока 8 деления подключен выход второго элемента 10 сравнения, на входы кото рого Подключены выходы задатчика 11 и 12. Вьгход задатчика 13 зоны нечувствительности регулятора положения соединен с вторым входом первого блока 9 умножения, выход последнего под ключен к одному из входов регуля ора 14 положения исполнительного механизма. Задатчик 5 максимально допустимого нагрева выполнен из последователь
0
5
п
5 0 5 0 5
но соединенных задатчика 15 квадрата номинального тока и второго интегратора 16.
Выход датчика 17 управляющего воздействия подключен к входу измерителя 18 среднеквадратического отклонения управляющего воздействия, выход которого подключен к первому входу второго блока 19 умножения, на второй вход которого подключен выход задатчика 20 коэффициента:
.2.
(1)
К
2К,
где Л - способность двигателя по току;
К.) - постоянный коэффициент.
Устройство содержит также ключи 21 и 22, причем ключ 21 подключен к одному из входов регулятора 14 положения, а второй ключ 22 подключен параллельно входу 14 регулятора (шунтирующий ключ). Устройство содержит также измеритель 23 коэффициента асимметрии, третий 24 сравнения и третий блок 25 умножения, при этом измеритель 23 коэффициента асимметрии состоит из последовательно соединенных измерителя 26 третьего центрального момента, четвертого блока 27 умножения, третьего блока 28 деления, а также третьего задатчика 29 коэффициента, выход которого соединен с вторым входом четвертого блока 27 умножения и кубического преобразователя 30, выход которого соединен с вторым входом третьего блока 28 деления, а его вход соединен с выходом измерителя 18 среднеквадратического отклонения, вход измерителя третьего центрального момента соединен с выходом датчика 17 управляющего воздействия. Выход третьего блока 28 деления соединен с первым входом третьего элемента 24 сравнения, второй вход которого соединен с выходом задатчика 12 единичной функции. Выход третьего элемента 24 сравнения соединен с первым входом третьего блока 25 умножения, второй вход которого соединен с выходом задатчика 11 коэффициента перегрузочной способности двигателя. Выход третьего блока 25 умножения соединен с вторым входом первого элемента 7 сравнения и первым
входом второго элемента 10 сравнения.
I
Устройство работает следующим образом.
где 1, - номинальный ток двигателя.
С выхода первого блока 6 деления на вход элемента 7 сравнения поступает сигнал
Ji dt т
dt
(-)
(3)
На второй вход элемента 7 сравнения и на первый вход элемента 10 сравнения поступает сигнал с задатчика 11 постоянной Д и дополнительного третьего блока 25 умножения
),
где сигнал К формируется на выходе третьего блока 28 деления и равно
4
JlL d
где третий центральный момент управляющего воздействия, формируемый на выходе блока 26; (э - среднеквадра- тическое отклонение управляющего воздействия, формируется на выходе блока 18, а (э - на выходе кубического преобразователя 30; К 1/6 - формируется на выходе блока 29.
На второй вход второго элемента 10 сравнения поступает сигнал с задатчика 12 постоянной величины. С выхода элемента 10 сравнения на второй вход
4l-K) - 1 A41-V -(-г)
L U
и,
(5)
В регуляторе положения устанавливается новая зона нечувствительности U.2 при которой эквивалентный ток не превышает номинального, что удовлетворяет условию допустимого нагрева двигателя.
С датчика 17 сигнал, соответствующий управляющему воздействию (f , поступает в измеритель 18 среднеквадратичного отклонения, и с выхода последнего сигнала 65 поступает на первый вход блока 19 умножения. На второй вход блока 19 поступает сигнал с выхода задатчика 20 коэффициента, величина которого определяется в виде
- -Tip -
В блоке 19 умножения величины К и 6 перемножаются. С выхода блока 19 через ключ 21 на вход регулятора 14 поступает сигнал U Kd( , пропорциональный такой зоне нечувствительности, при установке которой в регуляторе положения позиционной системы электродвигатели работают в режиме, обеспечивающем равенство эквивалентного тока и номинального токов двигателя. После установки X ключ 21 отключает цеп расчета начальной зоны нечувствительности, а ключ 22 переключает на вход регулятора положения цепь управления.
Так как управляющее воздействие на входе регулятора положения является стационарным случайным процессом, близким к нормальному, то необходимо это учитывать при формирова- НИИ зоны нечувствительности регулятора положения в зависимости от коэффициента асимметрии, с помощью которого можно оценивать степень приближения действительного закона рас- пределения к нормальному.
Нагрузочная диаграмма электродвигателей нажимных винтов, показанная на фиг. 2, формируется в соответстви с управляющим воздействием. Зона не- чувствительности регулятора 14 положения обозначена ±. Так как закон распределения управляющего воздействия имеет различные коэффициенты асимметрии, то для достижения уело- ВИЯ, при котором номинальный ток 1 двигателя равен эквивалентному 1, необходимо выполнить неравенство
11 дЧт - к) - 1 ,.
и, 7, :Г, (7)
Г(
1 - к; - (
1- и
ч1
где IK - номинальный ток двигателя; Iji - эквивалентный ток двигателя; Ij - перегрузочная способность двигателя по току; и, - начальная зона нечувствительности регулятора положения; Uj - скорректированная зона нечувствительности регулятора положеА,
1(- третий цент-
кия; К, К --,
ральный момент управляющего воздействия; и - среднеквадратическое отклонение управляющего воздействия; К 1/6 - постоянный коэффициент.
Зависимость неравенства (7) получена следующим образом.
Зависимость количества пусковых циклов и величины эквивалентного тока двигателей нажимных винтов от ве личины зоны нечувствительности позиционного регулятора соответствует среднему числу пересечений стационарного случайного процесса с нулевым средним в единицу времени на уровне и с заданным знаком производной, близкого к нормальному, и равна (3).
-и
(u) и
е
(8)
где А, - среднее число пересечений и стационарного случайного процесса с нулевым средним в единицу времени на уровне U с заданным знаком производной близкого к нормальному;
х).
и - среднеквадратическое
отклонение управляющего воздействия; 4, - среднеквадратическое отклонение производной случайного процесса. Среднее число выбросов стационарного нормального случайного процесса с нулевым средним над уровнем +11 за время Т равно (4): j
и
(9J
где дисперсия случайного управляющего воздействия; Dfш - дисперсия производной случайного управляющего воздействия.
Средние длительности выбросов стационарного нормального процесса работы (3) следующие:
itg
)J
и.
(10)
где Uj - среднее число выбросов Стационарного нормального случайного процесса с нулевым средним над уровнем ±и, за время ТцГ
F(X)
i
dt.
F(X) - интеграл Лапласа
0/
У2ТГ
-и.
2Ь
dt
5
5
Средняя продолжительность пребывания процесса над уровнем +и, равна
TB 2Tjl - F fej,(11)
i/
Как показывают исследования, закон распределения разнотолщинности близок к нормальному. Геометрические параметры, определяющие точность тонколистового проката, изменяются от полосы к полосе,, от листа к листу в связи с непостоянством условий прокатки. Эти изменения носят случайный характер. Тогда качество проката можно характеризовать математическим ожиданием, среднеквадратическим отклонением (дисперсией) и асимметрией (скошенностью).
Асимметрия (или скошенность) характеризуется коэффициентом асимметрии
S - d
где уи,- третий центральный момент случайного управляющего воздействия; и - среднеквадратическое отклонение управляющего воздействия;
|U 5 (U)f(U ) dU
(12)
и - случайная величина управляющего воздействия; f(U) - плотность распределения случайного управляющего воздействия.
Плотность распределения случайного управляющего воздействия соответствующему нормальному закону распределения с нулевым средним U равна
1- 1
fJU)
и IT
ViT
(13)
где 6 - среднеквадратическое отклонение .
Процесс нагружения злектродвига- телей нажимных винтов близок к нормальному и его плотность распределения в большинстве случаев является унимодальной и ветви по обе стороны от вершины достаточно быстро приближаются к нулю при возрастании абсолютного значения аргумента. Такие плотности вероятности удобно аппроксимировать с помощью полиномов Эрмита.
Рассмотрим случай, когда плотност распределения характеризуется асимметрией. В зтом случае плотность распределения управляющего воздействия можно представить в виде Эдхворта:
f(U) X „(и) 1+Ан,(и/), (14)
где f(U,) - нормальная плотность, распределения; S - асимметрия (или
Т. Tj2-(l+2K3,b.)(i + к,)1. (21) 1/
Эквивалентный ток двигателя нажимного винта определяется по формуле
iiwif л . л ял лхлг - I -.. Iг
IIт - - Т
скошенность) распределения; Н,(--) - 1
0
5
0
5
5
0
,, rU,
,и,
f-}(16)
Ч
5
где f(-) - плотность распределения
ц управляющего воздействия.
Подставив выражение (14) в (16), получим:
,(b.) ,.S H,(ifl)d(b(17)
L i/
Аппроксимируем выражение (17) следующей зависимостью:
F(b-) (K,,)x(l+K -Jl.) (18) l ir °if
при условии и,, что практически всегда выполняется в системе автоматического регулирования толщины полосы, где &(f среднеквадратическое отклонение управляющего воздействия; fi, - третий центральный момент управляющего воздействия; К и К, постоянные коэффициенты.
Для подтверждения выражения (18) были построены графики функций плотности распределения и функции распределения управляющего воздействия (фиг. 3 и 4) при различных значениях асимметрии Бис помощью выражений (14) и (18).
Выражение (18) с учетом К 0,5 и К 0,35 по графику на фиг. 4 для нормального закона распределения при получим:
F(Hi.) (0,5+0,35 + к,-) (19) 6(/3
Подставляя выражение (19) в (11), имеем
Т,- 2Tjl-(0,5+K,)(1+IC-) (20)
f 1,3 В общем виде
Т. Tj2-(l+2K3,b.)(i + к,)1. (21) 1/
Эквивалентный ток двигателя нажимного винта определяется по формуле


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для тепловой защиты электродвигателя | 1987 |
|
SU1525801A1 |
| Устройство для тепловой защиты электродвигателя | 1984 |
|
SU1229882A2 |
| Устройство для тепловой защиты электродвигателя | 1977 |
|
SU765930A2 |
| Устройство для тепловой защиты электродвигателя | 1985 |
|
SU1309158A2 |
| Устройство для тепловой защиты электродвигателя | 1977 |
|
SU675517A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2571693C1 |
| Устройство для тепловой защитыэлЕКТРОдВигАТЕля | 1978 |
|
SU817846A1 |
| Устройство для тепловой защиты электродвигателя | 1978 |
|
SU714566A1 |
| Способ тепловой защиты электродвигателя следящей системы | 1978 |
|
SU790064A1 |
| Устройство для регулирования толщины полосы | 1988 |
|
SU1585039A1 |
Изобретение относится к схемам защиты электрических двигателей,реагирующих на ток перегрузки. Целью изобретения является повьпиение точности функционирования путем автоматической установки зоны нечувствительности регулятора положения исполнительного механизма. Цель достигается введением в устройство измерителя 23 коэффициента несимметрии, третьего элемента 24 сравнения и третьего блока 25 умножения. Это дает возможность учитывать неравномерность нагрузки на двигатель, позволяя добиться оптимального режима его работы. 4 ил.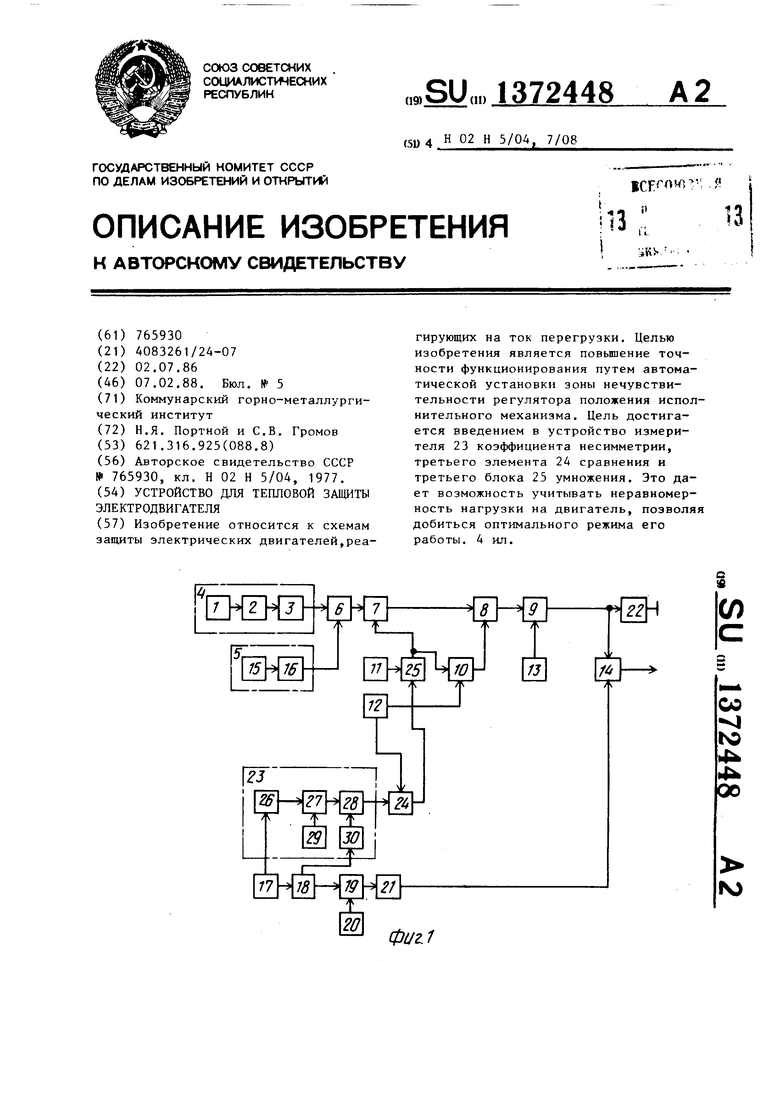
полином Эрмита, который равен
н,(,
fe - зф.
& 6
(15)
Функция распределения случайного управляющего воздействия определяется вьфажением:
где 1ц - пусковой ток двигателя; ;i - перегрузочная способность двигателя по току; IH - номинальный ток двигателя.
Учитывая, что
UB
Ч т,
(23)
запишем
А 1,
Тт
(24)
В тех случаях, когда эквивашентный ток превышает номинальный,что может привести к недопустимому нагреву электродвигателя, необходимо воздействовать на настроечные параметры Q системы автоматического регулирования толщины полосы так, чтобы выполнялось условие
Ь ЧДопустим,
I
и т ,
л IK -sr- , Ц
откуда
(Ь )2.
Si,
(25)
Приравнивая выражение (24) и (21), получим
(НК,)
1 V
ТГ
Ui
(26)
Из полученных соотношений после несложных преобразований получаем, что для выполнения неравенства
1 - 1„ при Ij 7 1„
необходимо выполнить зависимость „ , A4l-K4)-l
A4l-K,)-(ii)
J- н
и
(27)
где Ij - эквивалентный ток двигателя; 1 - номинальный ток двигателя; / перегрузочная способность двигателя по току; и, установленная зона нечувствительности регулятора положения; и - скорректированная зона нечувствительности регулятора положения, при котором эквивалентный ток
Mj
не превьппает номинального; ---;
бдг
- третий центральный момент управ-- ляющего воздействия; 6с среднеквад- ратическое отклонение управляющего
Qь
Ь 10
постоянный коэфвоздействия;фициент КJ 1/6.
Технико-экономическим преимуществом предлагаемого устройства является то, что расширяет функции основного устройства, учитывая непостоянство условий прокатки, позволяя добиться оптимального режима двигателя, что повышает точность изготовления изделия .
Формула изобретения
5
0
5
0
5
0
5
0
Устройство для тепловой защиты электродвигателя по авт.св. №765930, отличающееся тем, что, с целью повьш1ения точности функционирования путем автоматической установки зоны нечувствительности регулятора положения исполнительного механизма, в него дополнительно введены измеритель коэффициента асимметрии, третий элемент сравнения и третий блок умножения, при этом измеритель коэффициента асимметрии выполнен состоящим из последовательно соединенных измерителя третьего центрального момента, четвертого блока умножения и третьего блока деления, а также третьего задатчика коэффициента, выход которого соединен с вторым входом четвертого блока умножения, кубического преобразователя, выход которого соединен с вторым входом третьего блока деления, а его вход соединен с выходом измерителя среднеквадрати- ческого отклонения, вход измерителя третьего центрального момента соединен с выходом датчика управляющего воздействия, выход третьего блока деления соединен с первым входом третьего элемента сравнения, второй вход которого соединен с выходом задатчика единичной функции, а выход третьего элемента сравнения соединен с первым входом третьего блока умножения, второй вход которого соединен с выходом задатчика коэффициента перегрузочной способности двигателя, а выход третьего блока умножения соединен с вторым входом первого эле- мента сравнения и первым входом второго элемента сравнения.
Ц О
-V,
S-.2fl
Фиг. 2
,0
сриг.
| Устройство для тепловой защиты электродвигателя | 1977 |
|
SU765930A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
