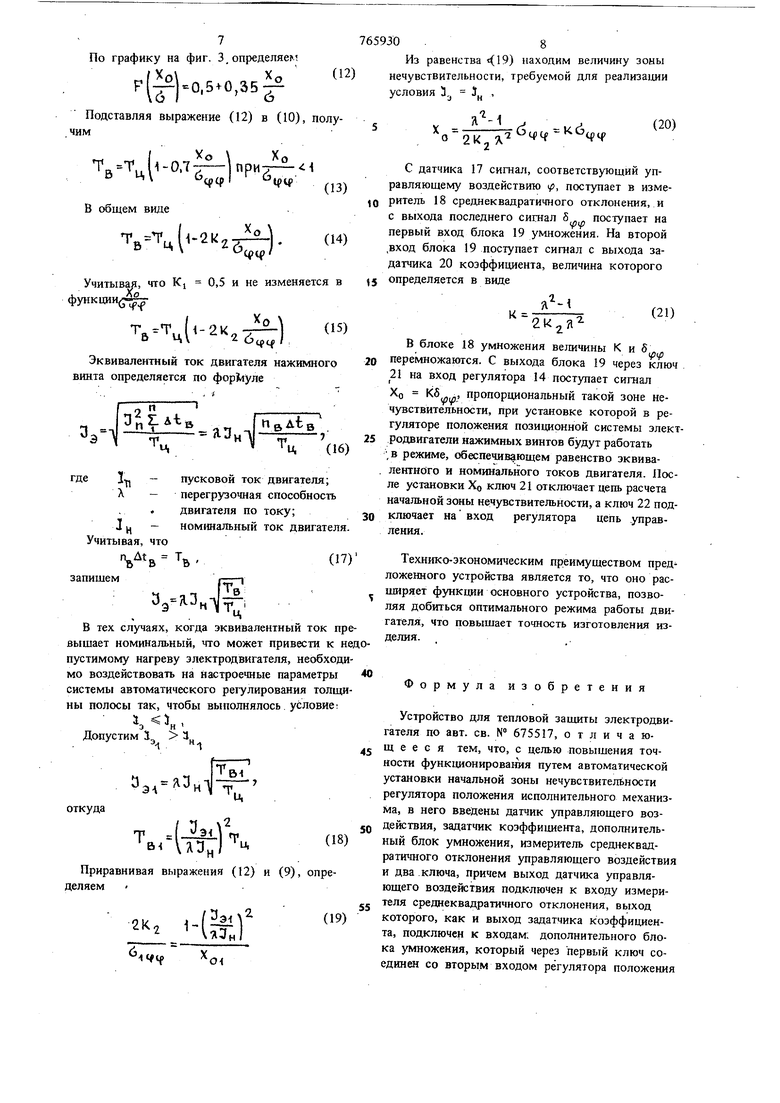
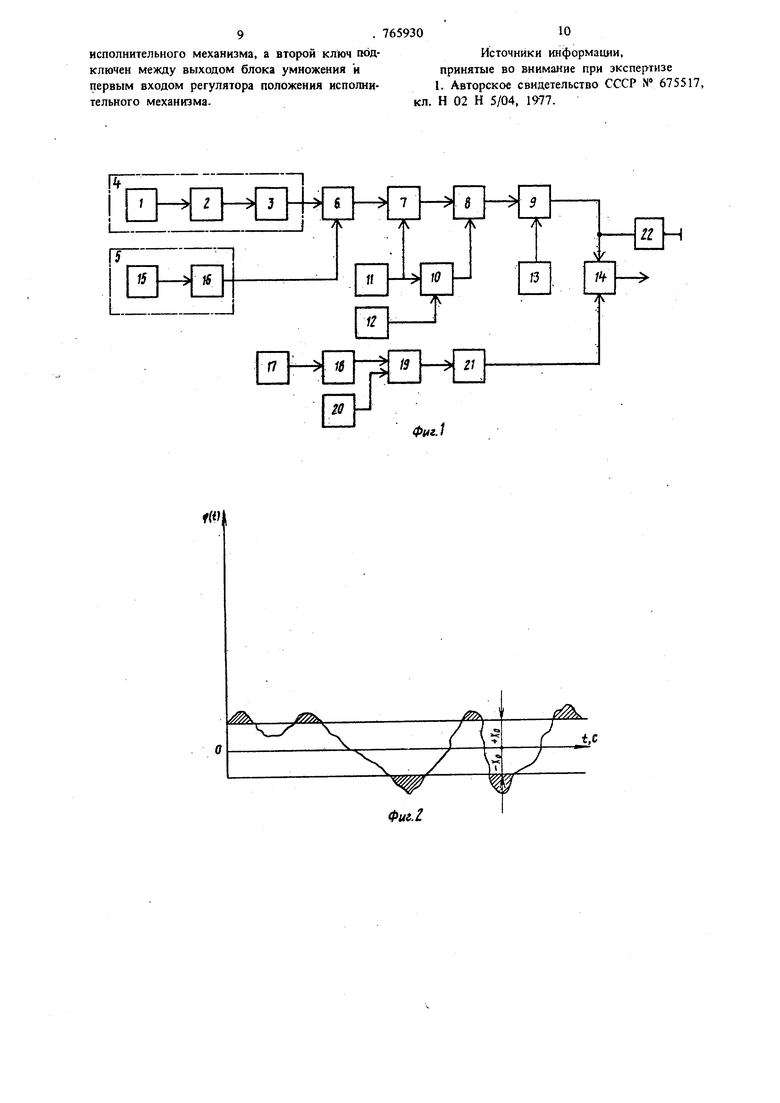
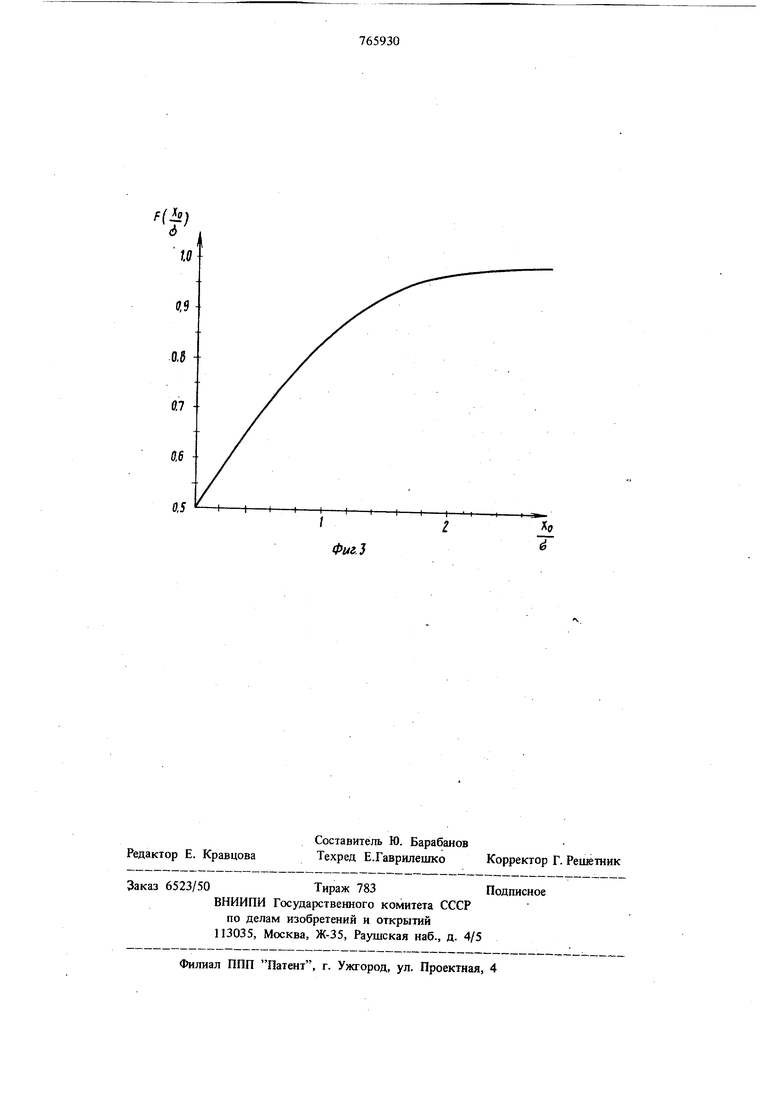
значительном уменьшении U, возможен перегрев двигателя из-за частых включений, а при значительном увеличении U) -- потеря качества продукции при наличии избыточного энергетического ресурса. Целью изобретения является повышение точности функвдонироваиия путем автоматической установки начальной зоны нечувствительности регулятора положения исполнительного механизма. Это достигается тем, что в нредложенное устройство введенр, датчик управляющего воздействия, задатчик коэффициента, дополнительный блок умножения, измеритель среднеквадратичного отклонения управляющего воздей(Ствия и два ключа, причем выход датчика управляющего воздействия подключен к входу измерителя среднеквадратичного отклонения, выход которого, как и выход задатчика коэффициента, подключен к входам дополнительного блока умножения, который через первый ключ соедш1ен со вторым входом регулятора положения исполнительного механизма, а второй ключ подключен между выходом блока умножения и первым входом регулятора положения исполнительного механизма. На фиг. 1 приведена функциональная схема предложенного устройства; на фиг. 2 - кривая случайного процесса управляющего воздействия системы автоматического ре)улирования з;юктродвигателей нажимных винтов прокатной клети с нгнесетюй зопой нечувствительности регулятора положения на уровне ±Xq , на фиг. 3 - график функции f(). Устройство содержит датчик 1 тока якоря, квадратичн1}1Й преобразователь 2, интегратор 3, составляюндае /датчик 4 квадрата действующего значения тока якоря. Выходы датчика 4 и задатчика 5 максимального допустимого нагрева пoдKJHoчeны к блоку деления 6. Устройство со держит также элемент сравнения 7, второй бло деления 8, блок умножения 9, второй элемент сравнения 10, задатчик 11 коэффициента перегрузочной способности двигателя, задатчик 12 единичной функции, задзтчик 13 зоны нечувствительности и регулятор 14 положения исполни тельного механизма. Зшдатчик 5 максимального допустимого нагрева содержит задагчик квадра та номинального тока 15 и интегратор 16. ДопoлнитeJн пo введены датчик 17 управляющего воздействия, измеритель 18 среднеквадратичного отклонения управляющег) воздействия, блок 19 умножения, залатчик 20 коэффищ1е. ключи 21 и 22, причем ключ 21 подключен к одному входу регулятора 14. Второй ключ 22 может быть подключен как последовательно в цепь регулятора 11 положения (замыкающий ключ), так параллельно входу регулятора 14 (шунтирующий ключ). Устройство работает следующим образом. С датчика 1 тока сигнал, пропорц юнальный фактическому току контролируемого двигателя, поступает на вход квадратичного преобразователя 2, на выходе которого образуется сигнал, пропорциональный квадрату фактического тока, который поступает на вход интегрирующего устройства 3 и преобразуется в сигнал, пропорциональный интегралу квадрата тока где Т - время интегрирования. Сигнал с интегратора 3 поступает на первый вход первого блока деления 6, на второй вход которого поступает с выхода задатчика 5 максимально допустимого нагрева сигнал, пропорциональный интегратору от квадрата номинального тока I С выхода первого блока деления 6 на вход элемента сравнения 7 поступает сигаал Т На второй вход элемента сравнения 7 поступает сигнал с задатчика 11 постоянной Х. Эти сигналы алгебраически суммируются и на выходе элемента 7 сравнения формируется сигнал --(V Ьн) который поступает на вход блока 8 деления. На входы элемента 10 сравнения поступают сигналы с выходов первого 11 и второго 12 задатчиков постоянных величин, с выхода элемента 10 сравнения на второй вход блока деления 8 поступает сигнал алгебраической суммы выходных сигналов задатчиков 11 и 12 .Л - 1 На выход блока 8 деления формируется сигнал 2 (12-1 который поступает на первый вход блока 9 умножения, на второй аход которого поступает с задатчика 13 сигнал, пропорциональный заданной зоне нечуветвитешности U,. Указанные величины перемножаются в блоке умножения 9 и с выхода последнего на вход коррекции регулятора положения 14 поступает сигнал, пропорциональный величине скорректированной зоны нечувствительности Ьн) В регуляторе положения устанавливается новая зона нечувствительности Uj, при которой эквивалентный ток не превышает номинального что удовлетворяет условию допустимого нагрева двигателя. На вход датчика 17 управляющего воздействия поступает сигнал, пропорциональный фактической разнотолщинности полосы. При прокатывании первой полосы из партии ключ 22 отключает (шунтирует) основную схему, а ключ 21 включает в работу цепь расчета начальной зо ны нечувствительности. Управляющее воздействи поступающее на вход датчика 17, является нормальным стационарным случайным процессом с нулевым средним. Ввиду того, что нагрузочная диаграмма электродвигателей нажимных винтов, показанная на фиг. 2, формируется в соответствии с управляющим воздействием она является реализацией нормального стационарного случайного процесса с нулевым средним, причем зона нечувствительности регулятора 14 обозначена ±Хо. Для достижения условия, при котором номинальный ток 3 двигателя равен его эквивалентному току 3, т.е. для достижения оптимального режима его работы, необходимо определить и установить начальную зону нечувствительности Хо позиционного регулятора 14. Определено, что начальная зона нечувствительности позиционного регулятора Хо характеризует ся следующей зависимостью; коэффициент перегрузовдой способности двигателя; постоянная величина; дисперсия случайного процесса управляющего воздействия. Вывод определения XQ произведен следующим образом. Зависимость количества пусковых циклов и величины эквивалентного тока двигателей на жимных винтов от величины зоны нечувствительности позиционного регулятора соответствует среднему числу пересечений стационарного нормального процесса с нулевым средним в едиу времени на уровне XQ с заданным знаком изводной и равно: ) -е , М -5 Га} дисперсия производной случайного процесса (дисперсия производной управляющего воздействия) . реднее число выбросов стащюнарного норного процесса с нулевым средним над урови ±Хо за время Т х IjijDDfl a -2Щ (8) -ИГ ,/ реднее длительности выбросов стационарноормального процесса Г -f где F(x) - интеграл Лапласа. Средняя продолжительность пребывания проесса выше уровня -iXo и ниже уровня - Хр. и (б) Аппроксимируем интегра.Ч Лапласа зависиостью°). о при условии что практически всегда выполняется в системе автоматического регулирования толщины полосы. По графику на фиг. 3, определяелт UJfirVjr lib « v iij--fХо..iS Подставляя выражение (12) в (10), зляя выражение (12) чим Уо X /Vo Хо Т Т М-ОД-.- В 4 о,,р| г б.,,.,, ср(р I tf{ В общем виде .(b2k2 Учитывая, что Kj 0,5 и не изменяе функции Эквивалентный ток двигателя нажим винта определяется по форЛ1уле М.яп„ д.- - пусковой ТОК двигат X - перегрз очная способ , двигателя по току; ц - номинальный ток дв Учитывая, что запищем в тех случаях, когда эквивалентный вышает номинальный, что может привес пустимому нагреву электродвигателя, н мо воздействовать на настрое шые пара системы автоматического регулирования ны полосы так, чтобы выполнялось ус . Допустим 1 Л1 Приравнивая выражения (12) и (9), деляем Из равенства 19) находим величину зоны ечувствительности, требуемой для реализации словия 3,j 3„ , (if ifif С датчика 17 сигнал, соответствующий управляющему воздействию tf, поступает в измеритель 18 среднеквадратичного отклонения, и с выхода последнего сигнал 5 поступает на первый вход блока 19 умножения. На второй вход блока 19 поступает сигнал с выхода задатчика 20 коэффициента, величина которого определяется в виде в блоке 18 умножения величины К и 5 перемножан тся. С выхода блока 19 через ключ 21 на вход регулятора 14 поступает сигнал Хо Кб .|„, пропорциональный такой зоне нечувствительности, при установке которой в регуляторе положения позиционной системы электродвигатели нажимных винтов будут работать ,в режиме, обеспечива1ющем равенство эквивалентного и номинального токов двигателя. После установки Хо ключ 21 отключает цепь расчета начальной зоны нечувствительности, а ключ 22 подключает на вход регулятора цепь управления. Технико-экономическим преимуществом предложенного устройства является то, что оно расширяет функции основного устройства, позволяя добиться оптимального режима работы двигателя, что повышает точность изготовления изделия. Формула изобретения Устройство для тепловой защиты электродвигателя по авт. св. № 675517, отличающееся тем, что, с целью повышения точности функционироваьшя путем автоматической установки начальной зоны нечувствительности регулятора положения исполнительного механизма, в него введены датчик управляющего воздействия, задатчик коэффициента, дополнительный блок умножения, измеритель среднеквадратичного отклонения управляющего воздействия и два .ключа, причем выход датчика управляющего воздействия подключен к входу измерителя среднеквадратичного отклонения, выход которого, как и выход задатчика коэффициента, подключен к входам; дополнительного блока умножения, который через первый ключ соединен со вторым входом регулятора положения
исполнительного механизма, а второй ключ подключен между выходом блока умножения и первым входом регулятора положения исполнительного механизма.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 675517, кл. Н 02 Н 5/04, 19-77.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для тепловой защиты электродвигателя | 1984 |
|
SU1229882A2 |
| Устройство для тепловой защиты электродвигателя | 1985 |
|
SU1309158A2 |
| Устройство для тепловой защиты электродвигателя | 1986 |
|
SU1372448A2 |
| Устройство для тепловой защиты электродвигателя | 1987 |
|
SU1525801A1 |
| Устройство для тепловой защиты электродвигателя | 1977 |
|
SU675517A1 |
| Устройство для тепловой защитыэлЕКТРОдВигАТЕля | 1978 |
|
SU817846A1 |
| Устройство для тепловой защиты электродвигателя | 1978 |
|
SU714566A1 |
| Устройство для тепловой защиты электродвигателя | 1978 |
|
SU720611A1 |
| Устройство для тепловой защитыэлЕКТРОдВигАТЕля | 1979 |
|
SU828303A1 |
| Способ тепловой защиты электродвигателя следящей системы | 1978 |
|
SU790064A1 |
М
Фиг. 2
F() о
W
0.9 0.6 a 0.6 0.5
Фиг.}
ё
