Изобретение относится к схемам защиты электрических двигателей, реагирующих на ток перегрузки, и может быть использовано в прокатном производстве, например в системе автоматического регулирования толщины полосы, прокатываемой в прокатном стане, для тепловой защиты электродвигателей нажимных винтов.
Цель изобретения - повьшение точ- ности функционирования путем обеспечения автоматической установки начальной зоны нечувствительности регулятора положения исполнительного механизма.
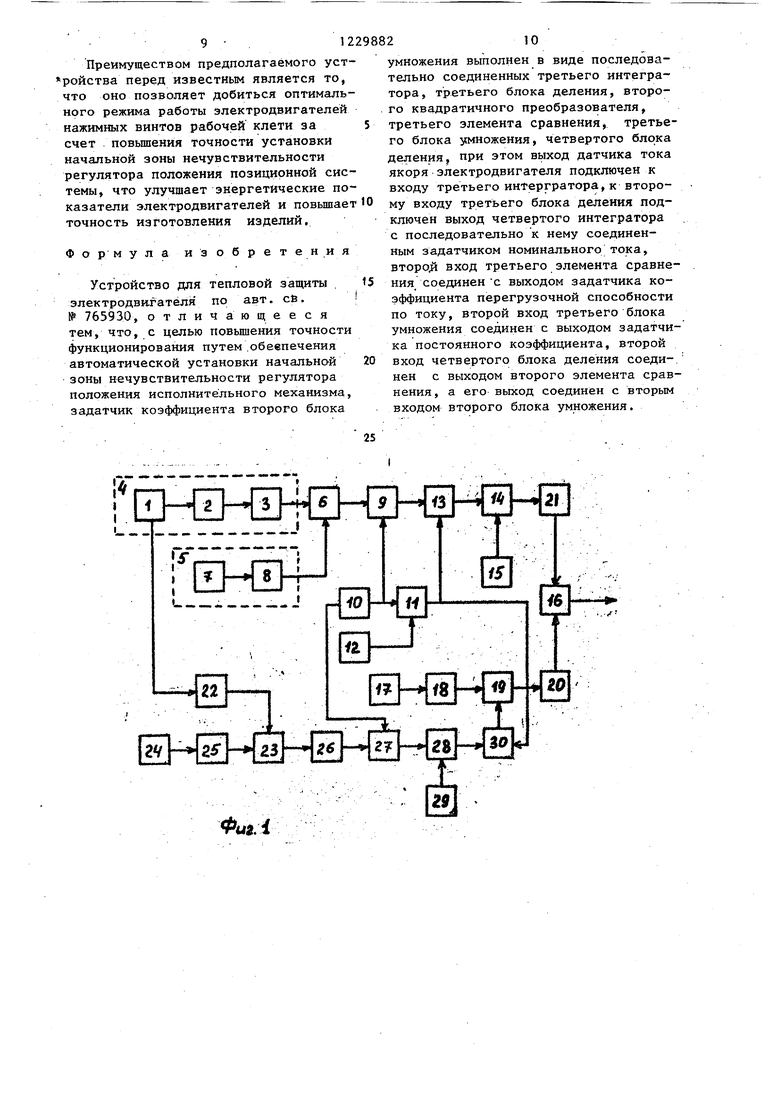
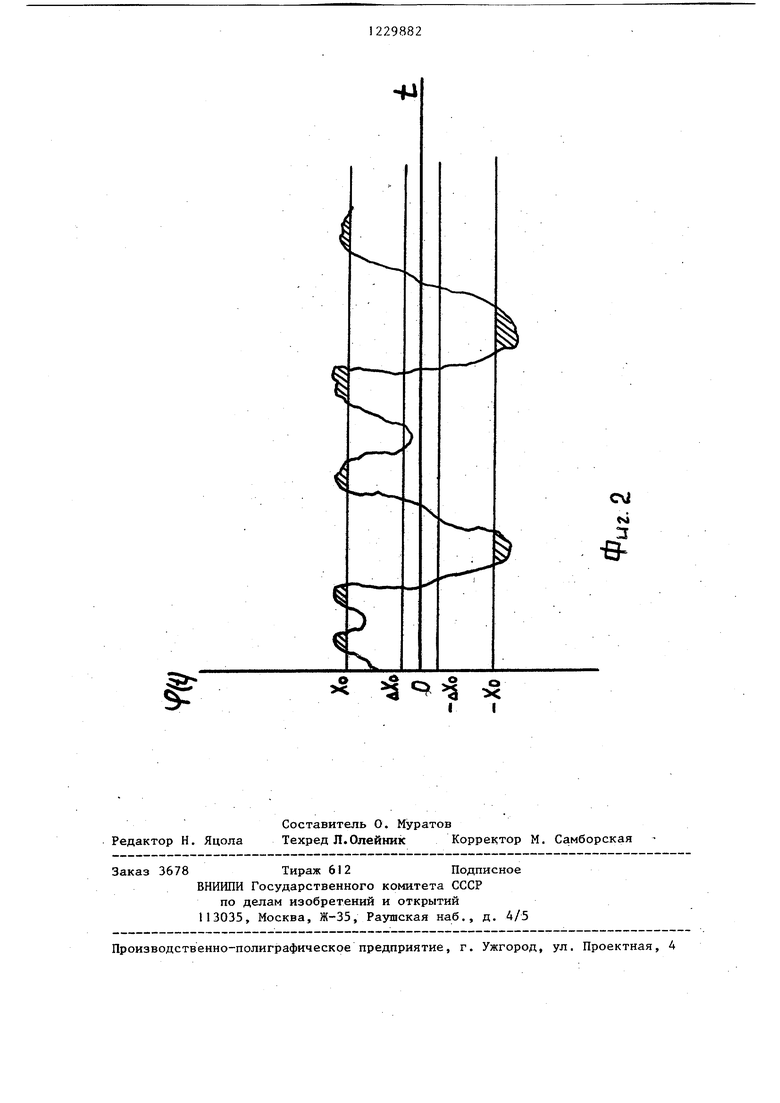
На фиг. 1 приведена функдиональ- ная схема устройства; на фиг. 2 - кривая случайного процесса управляю- щего воздействия системы автоматического регулирования электродвига- телей нажимных винтов прокатной кле- ти с нанесенной, зоной нечувствительности регулятора положения на уровне ±Х(7, когда постоянная составляющая : тока якоря двигателя (математичес- кое ожидание) +ДХо не равна нулю.
Устройство содержит последовательно соединенные датчик 1 тока якоря, первый квадратичный преобразователь 2 и первый интегратор 3, составляющие датчик 4 квадрата действующего значения тока якоря. Выходы датчика 4 и задатчика 5 максимального допустимого нагрева подключены к входу первого блока 6 деления. Задатчик 5 максимального допустимого нагрева состоит из последовательно соединенных задатчика 7 квадрата номинального тока и второго интегратора 8. Выход первого блока 6 деления соединен с первым входом первого элемента 9 . сравнения, второй вход которого подключен к выходу задатчика 10 коэффициента перегрузочной способности, а выход последнего соединен также с одним из входов второго элемента 1I сравнения, к второму входу которого подключен выход задатчика 12 постоянной величины, при этом каждый из выходов обоих элементов 9 и 11 сравнения подключен к входам второго блока 13 деления, а выход последнего соединен с первым входом первого блока 14 умножения, к второму входу которого подключен выход задатчика 15 зоны нечувствительности, причем выход первого блока 14 умножения подключен к первому входу регулятора 16 положени
5
0
0
5
0
исполнительного механизма. Выход датчика 17 управляющего воздействия подключен к входу измерителя 18 среднеквадратичного отклонения, выход которого подключен к первому входу второго блока 19 умножения. Выход последнего через первый ключ 20 соединен с вторым входом регулятора 16 положения, .а второй ключ 21 подключен между выходами первого блока 14 умножения и первым входом регулятора 16 положения.
Дополнительно введены третий интегратор 22, третий блок 23 деления, задатчик 24 номинального тока, четвертый интегратор 25, второй квадратичный преобразователь 26, третий элемент 27 сравненияj третий блок 28 умножения, задатчик 29 коэффициента, четвертьш блок 30 деления, при этом выход датчика 1 тока якоря двигателя подключен к входу третьего интегратора 22, выход которого соединен с пер-, вым входом третьего блока 23 деления,- к второму входу которого подключен (ВЫХОД последовательно соединенных задатчика 24 номинального тока и четвертого интегратора- 25. Выход третьего блока 23 деления соединен с входом второго квадратичного преоб- рДзователя 26, выход последнего соединен с первым входом третьего элемента 27 сравнения, второй вход которого соединен с выходом задатчика 10 коэффициента перегрузочной способности по току. Выход третьего элемента 27 сравнения соединен с первым . входом третьего блока 28 умножения, второй вход которого соединен с выходом задатчика 29 постоянного коэффициента, при этом выход третьего . блока 28 умножения соединен с- первьм входом четвертого блока 30 деления, второй вход которого соединен с выходом второго элемента П сравнения. В1.ГХОД четвертого блока 30 деления соединен с вторым входом второго блока 19 умножения.
Устройство работает следующим об- разом.
С датчика 1 тока сигнал,, пропор- циональный току контролируемого дви- гателя, поступает на вход квадратичного преобразователя 2, на выходе которого образуется сигнал, пропорциональный квадрату фактического тока, который поступает на вход интегрирующего устройства 3 и преобразуетралу квадрата тока:
I
-3
(1)
где Т - время интегрирования.
Сигнал с интегратора 3 поступает на первый вход первого блока 6 деления,, на второй вход которого поступает с выхода задатчика 5 максимальног дoпycти loгo нагрева сигнал, пропорциональный интегралу от квадрата номинального тока:
I ij (2) С выходи первого блока деления 6 на вход элемента сравнения 9 поступа ет сип
: Нал
J,
dt
J IK- dt
- Т1э (I± Ti| 4н
г
(2Г
На второй вход элемента . срав- нения 9 поступает сигнал с задатчика 10 коэффициента перегрузочной способности двигателя. Эти сигналы алгебраически суммируются и на выходе элемента 9 сравнения формируется
(Сигнал Л
--()% 1и
который поступает
на,вход блока 13 деления. На входы элемента 11 сравнения поступают сигналы с выходов первого 10 и второ- 30 го 12 задатчиков постоянных величин, с выхода элемента 11 сравнения на j второй вход блока 13 деления поступает сигнал алгебраической суммы выходных сигналов задатчиков 10 и 12,
На выходе блока 13 деления формируется сигнал
где Я - общая перегрузочная способность двигателя по току; л.- перегрузочная способность по постоянной составляющей тока (математическому ожиданию); К2. - постоянный коэффициент. В блоке 19 умножения величины К и ( перемножаются. С выхода бло-. ка 19 умножения поступает сигнал , пропорциональный такой зоне нечувствительности, при установке которой в регулятор положения пози- ционной системы электродвигатели нажимных винтов будут работать в режиме, обеспечивающем равенство эквиваК
я -ф-40
:лентного и номинального токов двига- () теля. После установки Хв ключ 20 от-i ключает цепь расчета начальной зоны i н.ечувствительности, а ключ 21 под- ключае т на вход регулятора цепь уп- 1равления.
Ввиду того, что нагрузочная диа- С грамма электродвигателей нажимных
который поступает на первый вход блока 14 умножения, на второй вход которого поступает с задатчика 15 сигнал, пропорциональный заданной зоне нечувствительности U,. Указанные вели-45 винтов, показанная на фиг. 2, фор
чины перемножаются в блоке 14 умножения и с выхода последнего на вход коррекции регулятора 16 положения поступает сигнал, пропорциональный величине скорректированной зоны нечувствительности:
50
и,
Л(Ь-)
и.,
(5)
мируется в соответствии с управляющим .воздействием, она является реализацией нормального стационарного случайного процесса (t) с не нулевым средним, причем зона нечувствитель- ,ностц регулятора 16 обозначена Jx. Для достижения повьшения точности установки начальной зоны нечувствительности регулятора 16 положения необходимо определять начальную зону нечувствительности Хр регулятора 16 положения с учетом математического ожидания ±дХо.
В регуляторе положения устанавливается новая зона нечувствительности Uj., при которой эквивалентный ток не превычает номинального, что
о-15
0
:
20
.нагрева двигателя.
На вход датчика 17 управляющего воздействия поступает сигнал, пропорциональный разнотолщенности полосы. .При прокатывании первой полосы из партии ключ 21 отключает (шунтирует) основную схему, и включается в работу цепь расчета предварительной (начальной) зоны нечувствительности регулятора 16 положения.
С датчика 17 сигнал, соответствующей управляющему воздействию f, поступает в измеритель 18 среднеквадратичного отклонения, и с выхода последнего сигнал (Щ поступает на первый вход второго блока 19 умножения, второй вход которого определяется выражением
К
(6)
25
30
2Kj.(7l.VU)
где Я - общая перегрузочная способность двигателя по току; л.- перегрузочная способность по постоянной составляющей тока (математическому ожиданию); К2. - постоянный коэффициент. В блоке 19 умножения величины К и ( перемножаются. С выхода бло-. ка 19 умножения поступает сигнал , пропорциональный такой зоне нечувствительности, при установке которой в регулятор положения пози- ционной системы электродвигатели нажимных винтов будут работать в режиме, обеспечивающем равенство эквива
мируется в соответствии с управляющим .воздействием, она является реализацией нормального стационарного случайного процесса (t) с не нулевым средним, причем зона нечувствитель- ,ностц регулятора 16 обозначена Jx. Для достижения повьшения точности установки начальной зоны нечувствительности регулятора 16 положения необходимо определять начальную зону нечувствительности Хр регулятора 16 положения с учетом математического ожидания ±дХо.
Определено, что начальная зона нечувствительности позиционного регулятора хо характеризуется зависимое- тью
« 2кГТХ-Ь
где Я - общий коэффициент перегрузочной способности двигатели по току; Х коэффициент перегрузочной
способности двигателя по постоянной составляющей тока (при математическом ожидании случайного процесса); К - постоянный коэффициент; Gtf4 V , где Dt - дисперсия случайного процесса управляющего воздействия.
Вывод определения XQ производят следующим образом.
Так как в реальном процессе возможно появление математического ожидания (постоянной составляющей), то целесообразно рассматривать выбросы относительно математического ожидания. В этом случае зависимость количества пусковых циклов от величины зоны нечувствительности позиционного регулятора соответствует среднему числу пересечений стационарного нормального случайного процесса с нулевым средним в единицу времени на уровне Xо с заданным знаком производной и равной
.Я (х;) е / . (ВТ
2П
ij .ii .
) ; ю«э Ус1иТ,
где дисперсия производной случайного процесса (дисперсия производной управляющего воздействия). Среднее число выбросов стационарного нормального процесса о нулевым средним над уровнями ±х., за время Тр
nfr
.Т. (DCfl) q
(9)
Среднее длит-ельностй выбросов стационарного нормального процесса
2Tu.D-F(4V)i (10) ;
fe F(x) щ.
Atfc
-i
- .
де F(x) - интеграл Лапласа.
Средняя продолжительность пребывания выше уровня +Хо и ниже уровня -Хр, учитьдаая, что Т| можно определить по формуле:
(), (11)
где Т - время пребывания процесса
вьше уровня +ХрИ ниже уровня -Хд.
Аппраксимирует интеграл Лапласа зависимостью
(|ff)0,.35 (12)
при условии o jjj l , что практически всегда выполняется в системе автоматического регулирования толщины полосы. Подставляя вьфажение (12) и (М), получаем
25
(1-0,7|),
(13)
(1-2Кг|). .(14) Учитывая, что .К 0,5 и неизменяется в функции (l-2Ki)
(15).
Квадрат эквивалентного тока двигателя можно-представить в виде суммы квадратов постоянной составляющей тока (математического ожидания) и среднеквадратичного отклонения от математического ожидания (дисперсии)
г J
(16)
где 1э - эквивалентный ток двигателя; I-j - постоянная составляющая тока
(математическое ожидание); li - среднеквадратичное отклонение от матетического ожидания (дисперсия). Разделим обе части выражения (Г6)
5
на I
li.
т2.
-I.та. f1
ll l
(17)
где 1ц - номинальный ток двигателя.
Слагаемые выражения (17) можно рассматривать как коэффициенты перегрузочной способности по постоянной составляющей тока (математическому ожиданию) и Среднеквадратичного отклонения, -от математического ожида- .ния (дисперсия):
Д Л,Де, (18)
е j{ - общая перегрузочная способность двигателя по току; - коэффициент перегрузочной
спс)собности двигателя по постоянной -составляющей тока (математического ожидания); коэффициент перегрузочной способности по средне квадратичному отклонению (дисперсия). Величина тока двигателя определя- .
ся по формуле:
Х
Л
г1
е If TH
Я.1нУ, (19)
-пусковой ток двигателя;
-номинальный ток двигателя.
Учитывая, что n(, запишем
Ч
(20)
Тогда квадрат эквивалентного тока двигателя с учетом формул (16) и (20)25 равен
.2. ,г. Чти
т т.т2-12
а
(21)
В тех случаях, когда эквивалентный ток превышает номинальный, что может привести к недопустимому нагреву электродвигателя, необходимо воздействовать на настроечные параметры системы автоматического регулирования толщины полосы так, чтобы .выполнялось условие ,
y -jiuoncz j..ii --
Допустим I 1ц ; 4 .
(22)
откуда
Tfc (э ) .,.„ 1 Iff . Приравнивая выражения (22) и (15),
Tu
.Ja
(23)
получаем
. 2Kt . PiMillll
0 Хо(ЯМ, -) Из равенства (23) находим величину зоны нечувствительности, требуемой и для реализации условия 10., с учетом постоянной составляющей тока двигателя (математическим ожиданием) :
(24)
-2К,
Для повьшения точности функционирования путем автоматической установки начальной зоны нечувствительности регулятора положения исполнительного. механизма, реализуют расчет начальной зоны нечувствительности регулятора положения из выражения (24).
-Gff.
С датчика.I тока сигнал, пропор- циональный фактическому ток; контролируемого двигателя, поступает на вход датчика среднего значения тока ,; который выполнен на третьем интеграторе 22, где он преобразуется в сигналJ пропорциональный интегралу тока:
0
5
15
}
,
(25)
где Т - время интегрироваиия.
Сигнал с выхода третьего интегратора 22 поступает на первый вход третьего блока 23.деления, на второй вход поступает сигнал с выхода четвертого интегратора 25, вход которого соединен с выходом задатчика 24 номинального тока, с-выхода четвертого интегратора 25 поступает сигнал, пропорциональный интегралу от номинального Тока: г
Jl.,
(26).
где Т - время интегрирования.
С выхода третьего блока 23 деления на вход второго квадратичного преоб- разо ателя 26 поступает сигнал
III dt TLt Ii л Tin In
(27)
5
-
5
0
На выходе второго квадратичного преобразователя 26 образуется сигнал, -пропорциональный квадрату коэффициента перегрузочной способности по постоянной составляющей тока двигателя (математическому ожиданию), который поступает на первый вход третьего элемента 27 сравнения. На второй вход последнего поступает сигнал с задат- чика 10 коэффициента Я. Эти сигналы, алгебраически суммируются и на выходе третьего элемента 27 сравнения формируется сигнал , который поступает на первый вход третьего блока 28 умножения, на второй вход которого поступает сигнал с задатчика 29 коэффициента .
Выход третьего блока 28 умножения, соединен с первым входом четвертого блока 30 деления, на второй вход ко-, тррого поступает сигнал алгебраической суммы выходных сигналов задатчи- ков П и .
На выходе четвёртого блока 30 де- . ления формируется сигнал определяемый выражением (6),
9 1229882
Преимуществом предполагаемого уст- ройства перед известным является то, что оно позволяет добиться оптимального режима работы электродвигателей нажимных винтов рабочей клети за 5 счет повьшения точности установки начальной зоны нечувствительности регулятора положения позиционной системы, что улучшает энергетические по казатели электродвигателей и повышает О точность изготовления изделий.
т т г д
в
Формула изобретения
Устройство для тепловой защиты электродвигателя по авт. св, № 765930, отличающееся тем, что, с целью повышения точности функционирования путем .обеепечения автоматической установки начальной зоны нечувствительности регулятора Положения исполнительного механизма, задатчик коэффициента второго блока
2
10
умножения выполнен в виде последовательно соединенных третьего интегратора, третьего блока деления, второго квадратичного преобразователя, третьего элемента сравнения, третьего блока умножения, четвертого блока деления, при этом выход датчика тока
якоря электродвигателя подключен к входу третьего интергратора, к второму входу третьего блока деления подключен выход четвертого интегратора с последовательно к нему соединенным задатчиком номинального тока, второчи вход третьего элемента сравнения соединен с выходом задатчика коэффициента перегрузочной способности по току, второй вход третьего блока умножения соединен с выходом задатчика постоянного коэффициента, второй вход четвертого блока деления соеди-. нен с выходом второго элемента сравнения , а его выход соединен с вторым входом второго блока умножения.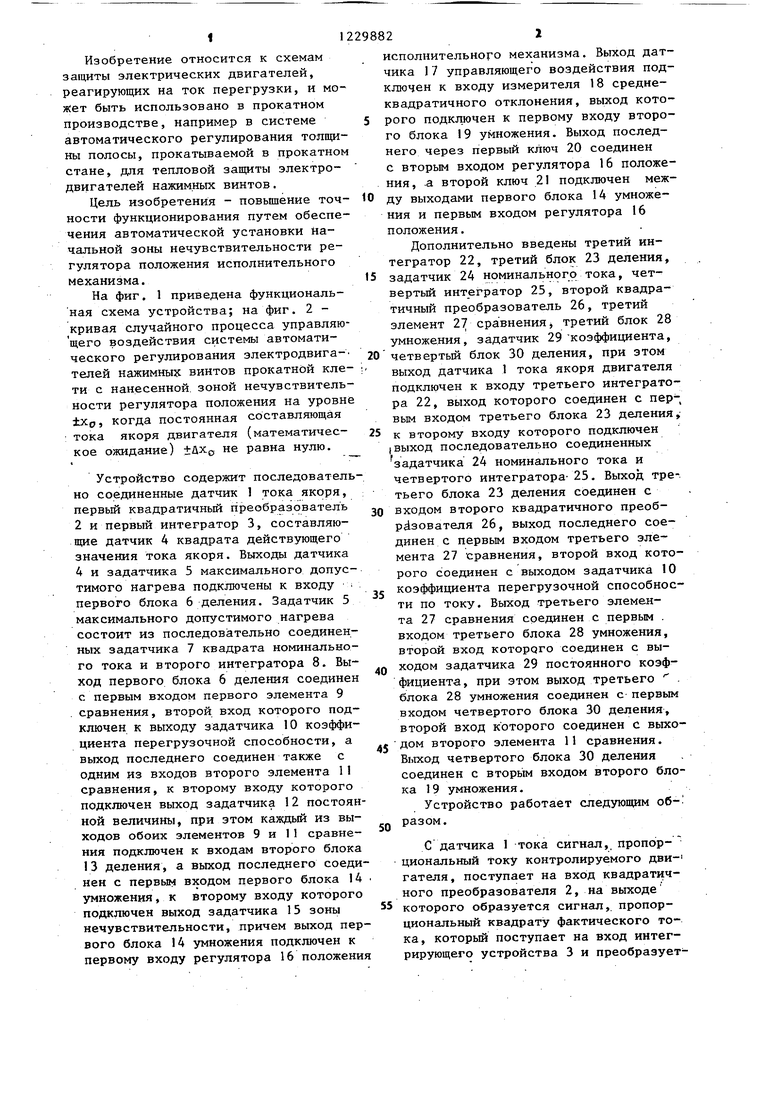
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для тепловой защиты электродвигателя | 1987 |
|
SU1525801A1 |
| Устройство для тепловой защиты электродвигателя | 1985 |
|
SU1309158A2 |
| Устройство для тепловой защиты электродвигателя | 1986 |
|
SU1372448A2 |
| Устройство для тепловой защиты электродвигателя | 1977 |
|
SU675517A1 |
| Устройство для тепловой защиты электродвигателя | 1977 |
|
SU765930A2 |
| Устройство для тепловой защитыэлЕКТРОдВигАТЕля | 1978 |
|
SU817846A1 |
| Устройство для тепловой защиты электродвигателя | 1978 |
|
SU714566A1 |
| Устройство для тепловой защиты электродвигателя | 1978 |
|
SU720611A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Устройство для тепловой защитыэлЕКТРОдВигАТЕля | 1979 |
|
SU828303A1 |
Изобретение относится к электротехнике - тепловой защите электродвигателя от тока, перегрузки, и может быть использовано для защиты электродвигателей нажимных винтов в прокатном стане и является дополнительным к изо бретенйю по авт.. свид. № 765930. Цель изобретения - повьшение точности функционирования - достигается путем автоматической установки начальной зоны нечувствительности регулятора положения исполнительного механизма. Устройство содержит датчик квадрата действующего значения тока 4, задат- чик 5 максимально допустимого нагрева, задатчик коэффициента второго блока умножения (ЗКВБУ). з кВБУ вьшол- нен из последовательностей цепи: задатчика 24 номинального тока, интегратора 25, блока 23 деления, квад ратичного преобразователя 26, третьего -элемента 27 сравнения, блока 28 умножения, задатчика 29 коэффициента и .четвертого блока 30 деления. После установки заданной зоны нечувствительности ключ (к) 20 отключает цепь расчета начальной зоны нечувствительности. К 21 .подключает на вход регулятора (Р) 16 цепь управления. Точность начальной зоны нечувствительности обеспечивается в ЗКВБУ, который подключают через К 20 к Р 16. 2 ил.. § (О
Фui.i
cvi
3
-&
Редактор H, Яцола
Составитель О. Муратов
Техред Л. Олейник Корректор М. Самборская
Заказ 3678Тираж 612Подписное
ВНИШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Устройство для тепловой защиты электродвигателя | 1977 |
|
SU765930A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
