Изобретение относится к электротехнике и может быть использовано в автоматизированных электроприводах постоянного тока.
Цель изо(5ретения - повышение точности регулирования.
На фиг. 1 представлена структурная схема электронривода; на фиг. 2 - схема выделения и преобразования управляющего сигнала.
Электропривод содержит электродвигатель 1 постоянного тока, якорная обмотка которого подключена к выходу усилителя 2 мощности, задатчик 3 сигналов управления, интегрирующий преобразователь 4, датчик 5 частоты вращения электродвигателя.
10
ных импульсов одноБибраторов 7 определяется соотнощением То М/Гсг,.Сумматор 8 предназначен для суммирования сигналов с BBI- ходов цифровых одновибраторов 7 и подачи результирующего сигнала на вход интегрирующего преобразователя 4, который выполняет функции интегрирования сигнала с выхода сумматора 8 и коррекции динамических характеристик электропривода.
Электропривод работает следующим образом.
В начальный момент (при включении) на выходах цифровых одновибраторов 7 образуются сигналы нулевого уровня и на выходе сумматора 8 появляется импульс отрицательВыход интегрирующего преобразователя 4 . ной полярности относительно входа интег25
30
соединен с входом усилителя 2 мощности. Кроме того, электропривод содержит распределитель 6 импульсов, вход которого соединен с выходом датчика 5 частоты вращения электродвигателя, четыре цифровых одно- вибратора 7 с повторным запуском, сумма- 20 тор 8 с четырьмя входами. Каждый из выходов распределителя 6 импульсов соединен соответствено с первыми входами цифровых одновибраторов 7, информационными входами, подключенными к информационному выходу задатчика 3 сигналов управления, первый выход которого соединен с вторыми входами цифровых одновибраторов 7, третьи входы которых подключены к второму выходу задатчика 3 сигналов управления. Выходы цифровых одновибраторов 7 соединены с соответствующими входами сумматора 8. Интегрирующий преобразователь 4 выполнен в виде ,интегрирующего операционного усилителя 9, снабженного цепью коррекции, состоящей из последовательно соединенных переменного резистора 10 и конденсатора И, подключенных между выходом сумматора 8 и инвертирующим входом интегрирующего операционного усилителя 9.
Сумматор 8 может бЬ1ть выполнен на четырех резисторах 12-15. В контур обратной связи операционного усилителя 9 вклю- 40 чен конденсатор 16. Между инвертирующим входом усилителя 9 и выходом сумматора 8 включен переменный резистор 17 На неинвертирующий вход усилителя 9 подключен переменный резистор 18 для плавной подстройки частоты вращ ения электропривода.
Распределитель 6 импульсов предназначен для поочередного запуска цифровых одновибраторов 7 импульсами от датчика 5 частоты вращения. Количество цифровых одновибраторов в общем случае равно 2п (где n€N) и они имеют 2п входов, коммутируемых распределителем 6 импульсов и 2п выходов. Цифровые одновибраторы 7 выполнены в виде одновибраторов с повторным
рирующего преобразователя 4. При этом напряжение на выходе интегрирую1цего преобразователя 4, подаваемое через усилитель 2 мощности на электродвигатель 1, увеличивается, вал двигателя начинает вращаться, а сигналы от датчика 5 частоты вращения с частотой, пропорциональной скорости вращения, поступают на вход распределителя импульсов. Распределитель 6 импульсов поочередно запускает одновибраторы 7, на выходах которых образуются последовательности импульсов заданной длительности To M/foii.(Сумматор 8 выделяет с учетом знака управляющие импульсы, длительность и амплитуда которых зависят от величины рассогласования между фактическим и заданным временными интервалами Выделенные импульсы преобразуются интегрирующим преобразователем 4. Напряжение с выхода интегрируюн,его преобразователя 4 через усилитель 2 мощности поступает на электродвигатель 7 и изменяет частоту
, вращения вала электродвигателя в сторону уменьшения разности между фактическим и заданным временными интервалами.
В установивщемся режиме выполняется равенство TQC период им- нульсов обратной связи (интервал времени между соседними выходными импульсами датчика 5 частоты врапдения, п - число пар цифровых одновибраторов.
При поступлении на вход «Стоп цифровых одновибраторов 7 управляющего сигнала на выходах одновибраторов образуются сигналы, имеющие уровень логической единицы, а на выходе сумматора 8 появляется сигнал положительной нолярности относительно входа интегрирующего преобразователя 4. При этом напряжение на выходе
CQ интегрирующего преобразователя 4 уменьшается и электродвигатель 1 останавливается.
Поскольку To M/foii частота вращения электродвигателя ( /Тис т, где гп - число импульсов, формируемых датчиком час45
запуском и снабжены тремя управляющими55 ™ вращения за один оборот вала дви- входами, предназначенными для установкигателя, то
кода М, подачи сигнала опорной частоты,,
fpn и сигнала «Стоп. Длительность выход- л -
0
ных импульсов одноБибраторов 7 определяется соотнощением То М/Гсг,.Сумматор 8 предназначен для суммирования сигналов с BBI- ходов цифровых одновибраторов 7 и подачи результирующего сигнала на вход интегрирующего преобразователя 4, который выполняет функции интегрирования сигнала с выхода сумматора 8 и коррекции динамических характеристик электропривода.
Электропривод работает следующим образом.
В начальный момент (при включении) на выходах цифровых одновибраторов 7 образуются сигналы нулевого уровня и на выходе сумматора 8 появляется импульс отрицатель ной полярности относительно входа интег5
0
0
0
рирующего преобразователя 4. При этом напряжение на выходе интегрирую1цего преобразователя 4, подаваемое через усилитель 2 мощности на электродвигатель 1, увеличивается, вал двигателя начинает вращаться, а сигналы от датчика 5 частоты вращения с частотой, пропорциональной скорости вращения, поступают на вход распределителя импульсов. Распределитель 6 импульсов поочередно запускает одновибраторы 7, на выходах которых образуются последовательности импульсов заданной длительности To M/foii.(Сумматор 8 выделяет с учетом знака управляющие импульсы, длительность и амплитуда которых зависят от величины рассогласования между фактическим и заданным временными интервалами Выделенные импульсы преобразуются интегрирующим преобразователем 4. Напряжение с выхода интегрируюн,его преобразователя 4 через усилитель 2 мощности поступает на электродвигатель 7 и изменяет частоту
вращения вала электродвигателя в сторону уменьшения разности между фактическим и заданным временными интервалами.
В установивщемся режиме выполняется равенство TQC период им- нульсов обратной связи (интервал времени между соседними выходными импульсами датчика 5 частоты врапдения, п - число пар , цифровых одновибраторов.
При поступлении на вход «Стоп цифровых одновибраторов 7 управляющего сигнала на выходах одновибраторов образуются сигналы, имеющие уровень логической единицы, а на выходе сумматора 8 появляется сигнал положительной нолярности относительно входа интегрирующего преобразователя 4. При этом напряжение на выходе
Q интегрирующего преобразователя 4 уменьшается и электродвигатель 1 останавливается.
Поскольку To M/foii частота вращения электродвигателя ( /Тис т, где гп - число импульсов, формируемых датчиком час5
Таким образом, в электроприводе частота вращения вала электродвигателя прямо пропорциональна опорной частоте и обратно пропорциональна коду М. Последнее соотношение можно также записать следующим образом:
То «-Тл
Электропривод позволяет одновременно повысить статическую и динамическую точность регулирования. Это достигается путем устранения погрещности делительного устройства датчика частоты вращения, а также благодаря увеличению частоты управляющих сигналов «внутри оборота вала двигателя без ухудшения точности формирования заданных временных интервалов.
Формула изобретения
Электропривод, содержащий электродвигатель постоянного тока, якорная обмотка которого подключена к выходу усилителя мощности, задатчик сигналов управления, интегрирующий преобразователь, датчик частоты вращения электродвигателя, выходом
0
5
0
связанный с входом интегрирующего преобразователя, выход которого подсоединен к входу усилителя мощности, отличающийся тем, что, с целью повышения точности регулирования, в него введены раснределите. н. импульсов, вход которого соединен с выходом датчика частоты вращения электро - двигателя, 2п цифровых одновибраторов с повторным запуском и сумматор с 2:1 входами, каждый из выходов распределителя имнуль- сов соединен соответственно с первыми входами цифровых одновибраторов, информационными входами подключенными к информационному выходу задатчика сигна. юв управления, первый выход которого соединен с вторыми входами цифровых одновибраторов, третьими входами подключенными к второму вы.чоду задатчика сигналов управления, выходы цифровых одновибраторов соединены с соответствующими сумматора, интегрирующий преобразовате. и. выполнен в виде интегрируюп1ег() операционного усилителя, снабженного цепью коррекции, состоянхей из носледовате.() соединенных переменного резистора и конденсатора, нодк. 1юченных между выходом сумматора и инвертируюпшм входом интегрирующего операционного уси. 1ите, 1я.
J foh
М
Редактор Н. Бобкова Заказ 1447/52
ВНИИПИ Государственного комитета СССР по делам изобретений и ()
113035, Москва, Ж-35, Раушская иаб., д. 4.5 Производственно-полиграфическое предприятие, г. Ужгород. , i. Проектная. 4
Составитель Т. Рожкова Техред И. ВересКорректор С. Черни
Тираж 661Подписное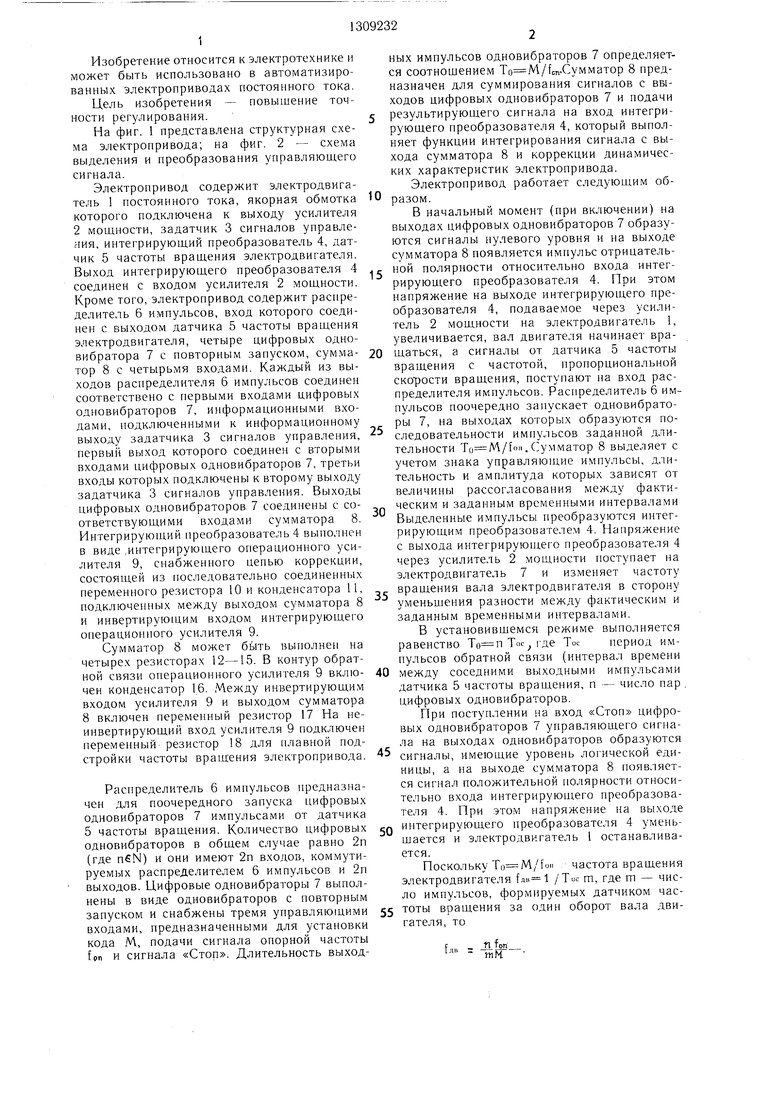

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой элетропривод | 1986 |
|
SU1399876A1 |
| Цифровой электропривод | 1983 |
|
SU1181105A1 |
| Электропривод постоянного тока | 1983 |
|
SU1100697A1 |
| Электропривод стенда для испытания механических передач | 1985 |
|
SU1429267A1 |
| Электропривод переменного тока | 1989 |
|
SU1757041A1 |
| Частотно-управляемый асинхронный электропривод | 1985 |
|
SU1257798A1 |
| ИЗМЕРИТЕЛЬ УДЕЛЬНОГО РАСХОДА ТОПЛИВА ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ | 1998 |
|
RU2137095C1 |
| Электропривод | 1986 |
|
SU1417151A1 |
| Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1307528A1 |
| Ротационный вискозиметр крови | 1991 |
|
SU1821129A1 |
Изобретение относится к электротехнике и м.б. использовано в автоматизированных электроприводах постоянного тока. Целью изобретения является повыа1ение точности регулирования. Электропривод содержит электродвигатель 1, при включении к-ро- го на 2п входах цифровых одновибраторов 7 образуются сигна.чы нулсвогч) уровня, на выходе сумматора 8 появ.пяется имну.аьс, увеличивается напряжение, подаваемое с выхода интегрирующего 11реобразовате. 1я 4 через усилитель 2 мопиюсти на электродвигатель 1. Сигналы от датчика 5 частоты вращения поступают на распределитель 6 импульсов, к-рый поочередно запускает цифровые одновибраторы 7, образуя на их выходах последовательности импу.чьсов заданной длительности. Сумматор 8 выде.пяет с учетом знака управ.чяющие импульсы, тельность и амплитуда к-рых зависят от величины рассогласования между фактическим и заданным временными интерва.:|ам11. Одновременно повышается статическая и динамическая точность регулирования за счет устранения погрешности делительного устройства датчика частоты вращения и увеличения частоты управляюп1их сигна. юв «внутри оборота вала двигате. ш. 2 и. 1. о о (Л со о со ю со ND
| Казьмерковский М | |||
| ,Вуйцак А | |||
| Схемы управления и из.мерения в промышленной электронике | |||
| - М.: Энергоатомиздат, 1983, с | |||
| Переносная печь-плита | 1920 |
|
SU184A1 |
| Цифровой электропривод | 1981 |
|
SU1042149A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
