13
1, который начинает отрабатывать вращение в прямом или обратном направлении, в зависимости от состояния ключа 4 или 6, При отработке люфта механизм 8 остается в покое. Фаза напряжения роторной обмотки датчика 9 изменяется пропорционально перемещению вала электродвигателя 1. При этом меняется фаза выходного сигнала датчика 10, которая приводит к компенсации выходного напряжения дискриминатора 3, При появлении нулевого сигнала на выходе дискриминатора 3 элек1
Изобретение относится к автоматике и может быть использовано для управления машинами и механизмами, в частности металлорежущими станками, роботами, манипуляторами.
Цель изобретения - повышение точности электропривода.
На чертеже изображена структурная схема преобразователя.
Электропривод содержит электро- двигатель 1, усилитель 2, фазовый дискриминатор 3, ключ 4, источник 5 напряжения, ключ 6, редуктор 7, исполнительный механизм 8, датчики 9 и 10 перемещения, фазорасщепитель 1 фазовый преобразователь 12, генератор 13, задатчик 14 сигналов, делитель 15 частоты.
Электропривод работает следующим образом.
В исходном состоянии, когда задание на перемещение отсутствует,вал электродвигателя 1 находится в середине люфта, датчики 9 и 10 перемещения согласованы с задатчиком 14, выходное напряжение фазового дискриминатора 3 равно нулю. При задании задатчиком 14 перемещения, например направления вращения вперед, включается ключ 4, на вход усилителя 2 по- дается положительное напряжение.Электродвигатель 1 начинает перемещение вала в люфте, исполнительный механизм 8 остается в неподвижном состоянии. При этом фаза напряжения ро- торной обмотки 9 перемещения изменяется пропорционально углу поворота
10775
тродвигатель 1 остановится, то есть люфт будет выработан. Если же на вход фазового преобразователя 12 с задат- чика 14 будет дополнительно подан код, то после отработки люфта электродвигатель начнет через редуктор 7 вращать и механизм 8. При перемещении механизма 8 выходное напряжение дискриминатора 3 сравняется с эталонным и электродвигатель 1 остановится. Таким образом осуществляется отработка люфта при любом положении вала электродвигателя 1 и механизма 8.1 ил.
вала электродвигателя 1. На эту величину изменяется фаза выходного сигнала датчика 10, поскольку обмотки ротора датчика 9 соединены с обмотками статора датчика 10. Если код величины перемещения равен нулю, то на выходе фазового дискриминатора 3 будет нарастать отрицательное напряжение. Когда напряжение фазового дискриминатора 3 будет равно эталонному напряжению источника 5, суммарный сигнал на входе усилителя 2 станет равным нулю и электродвигатель 1 остановится. Это соответствует перемещению вала электродвигателя 1 в положение, в котором люфт полностью выбран. Если же, кроме знака, задатчиком 14 был выдан код величины перемещения, то после выборки люфта электродвигатель 1 начинает перемещать исполнительньй механизм 8. Теперь фаза выходного сигнала датчика 10 перемещения будет определяться суммарным перемещением вала электродвигателя 1 и исполнительного механизма 8. При перемещении исполнительного механизма 8 в заданное положение выходное напряжение фазового дискриминатора 3 будет равно эталонному напряжению и электродвигатель 1 остановится .
Если подать задание на перемещение в направлении назад, то ключ 4 отключится, а ключ 6 включится. На втором сверху входе усилителя 2 сигнал становится равным нулю, на третьем входе - отрицательный сигнал.
31
в первый момент времени на входе усилителя 2 будет большой отрицательный сигнал, равный сумме сигналов на первом и третьем входах. Электродвигатель 1 начинает поворот вала в направлении назад. Люфт раскрывается, исполнительньй механизм 8 остается в прежнем положении. При вращении электродвигателя 1 в направлении назад датчик 9 перемещения обеспечивает уменьшение напряжения на выходе фазового дискриминатора 3 до нуля, а затем изменение его знака. В некото- рьй момент времени люфт будет выбран В этот момент времени сумма напряжений на первом и третьем входах усилителя 2 будет определятся перемещением в направлении назад. Происходит совместное перемещение электродвигателя 1 с исполнительным механизмом 8 в заданное положение.
Формула изобретения
Следящий электропривод, содержащий электродвигатель, кинематически соединенный с исполнительным механизмом и редуктором, источник напряжения, первый выход которого соединен с информационным входом первого ключа, задатчик сигналов, фазовый дискриминатор i усилитель, выход которого соединен с входом электродвигателя, первый и второй датчики перемеРедактор Е.Копча
Составитель М.Сидорова
Техред Л.Сердюкова Корректор М.Шароши
Заказ 1889/43Тираж 864Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раущская наб., д.4/5 .
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная,4
107754
щения, отличающийся тем, что, с целью повышения точности электропривода, в него введены генератор, делитель частоты, фазорасщепитель,
, фазовый преобразователь, второй ключ, . выход генератора соединен с входом делителя частоты, выход которого соединен с входом фа30расщепителя, выходы которого соединены с взводами
О первого датчика перемещения, вал которого кинематически соединен с валом электродвигателя, а выходы соединены с входами второго датчика перемещения, вал которого кинематичес15 ки соединен с исполнительным механизмом, а выход соединен с первым входом фазового дискриминатора, вы ход генератора соединен с первым входом фазового преобразователя, второй
0 вход которого соединен с первым выходом задатчика сигналов, а выход соединен с вторым входом фазового дискриминатора, выход которого соединен с первым входом усилителя,вто5 рой и третий выходы задатчика сигналов соединены с входами управления первого и второго ключей соответственно, информационный вход второго ключа соединен со вторым выходом ис30 точника напряжения, выходы первого и второго ключей соединены с вторым и третьим входами усилителя соответственно .
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод | 1974 |
|
SU607178A1 |
| Преобразователь кода в перемещение | 1986 |
|
SU1354419A1 |
| Следящий электропривод с компенсацией люфта | 1980 |
|
SU964574A1 |
| Следящий электропривод с компенсацией люфта | 1981 |
|
SU981929A1 |
| Следящий электропривод с компенсацией люфта | 1985 |
|
SU1273875A1 |
| Устройство для управления частотно-регулируемым электроприводом | 1985 |
|
SU1309245A1 |
| Следящий привод с коррекцией люфта в механической передаче | 1976 |
|
SU647646A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Фазовая следящая система | 1976 |
|
SU779970A1 |
Изобретение относится к области автоматики и может быть использовано для управления металлорежущими станками, роботами и манипуляторами. Целью изобретения является повышение /J точности электропривода, для чего в электропривод, содержащий усилитель 2, фазовый дискриминатор 3, ключ 4, источник 5 напряжения, редуктор 7, исполнительный механизм 8, датчики 9, 10 перемещения, задатчик 14 сигна лов, введены электродвигатель 1,ключ 6, фазорасщепитель 11, фазовый преобразователь 12, генератор 13, делитель 15 частоты. В исходном состоянии на выходе фазового дискриминатора 3 напряжение равно нулю. Электродвигатель 1 не вращается, а его вал находится в середине лн«})та. Задатчи- ком 14 открьшается один из ключей 4 или 6. Напряжение с источника 5 пода ется через один из ключей 4 или 6 че рез усилитель 2 на электродвигатель - .G (Л со | ел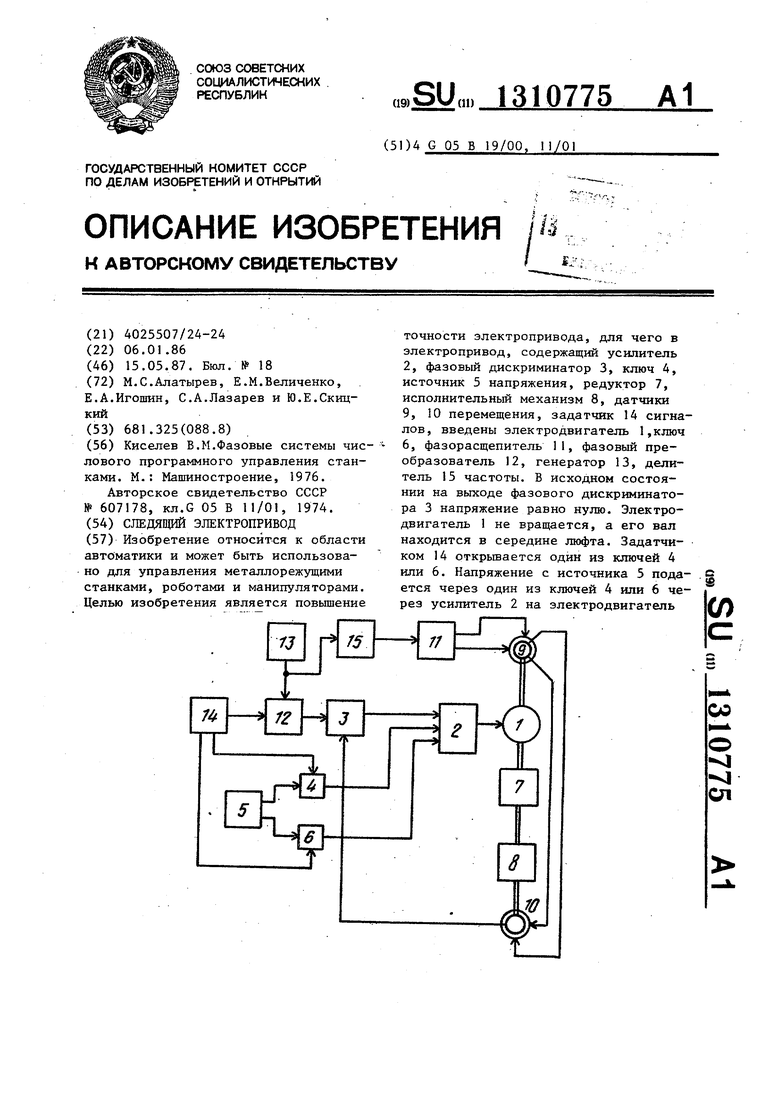
| Киселев В.М.Фазовые системы числового программного управления станками | |||
| М | |||
| : Машиностроение, 1976 | |||
| Следящий электропривод | 1974 |
|
SU607178A1 |
