(54)
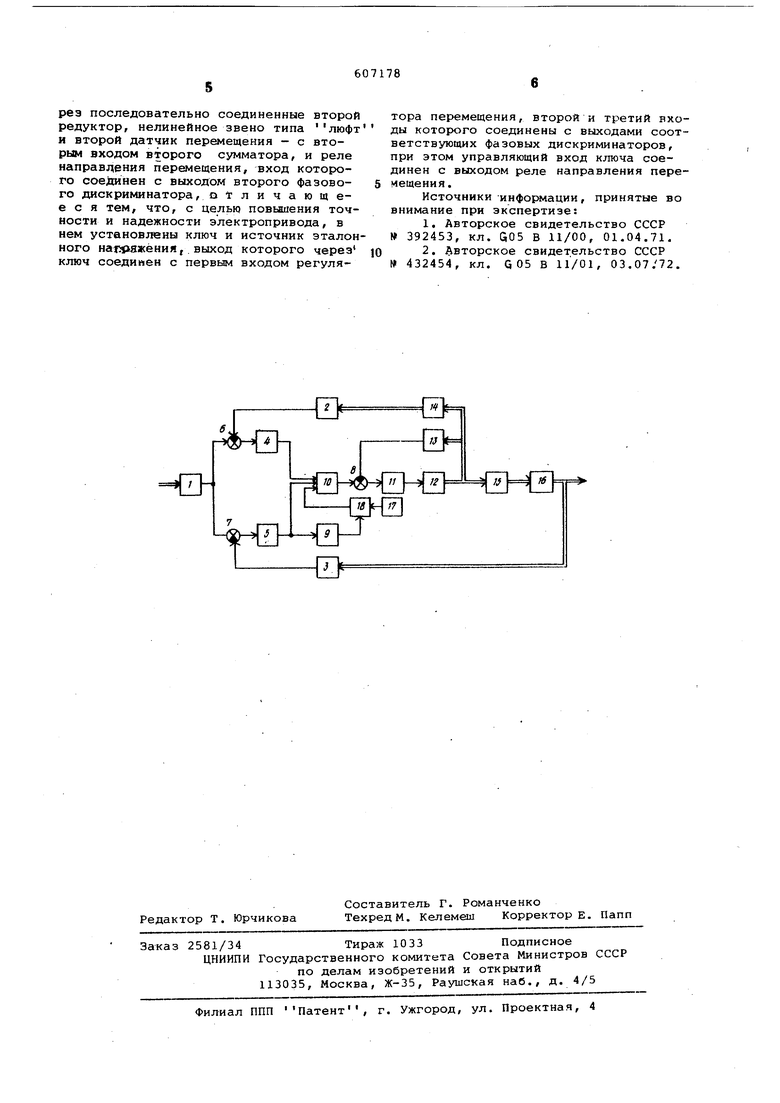
СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД ния, усилитель 11, исполнительный механизм 12, тахогенератор 13, редуктор 14 и 15, нелинейное эвeнo.типа люфт 16, источник 17 эталонного напряжения и ключ 18. Электропривод работает следующим образом. Предположим, что датчики 2 и 3 пере мещения согласованы с задатчиком 1 пе ремещения в крайнем правом положении и на выходах фазовых дискриминаторов 4и 5 напряжение равно О, Задатчиком 1 зададим единичное перемещение ,впере вправо (положительное напряжение пе пемещёния), Управляющее направление на входе регулятора 10 перемещения равно сумме выходных напряжений фазовых дис криминаторов, реле 9 направления перем щения отключено,ключ 18 разомкнут.Про исходит перемещение привода впередвправо ,и при согласовании датчиков перемещения с эадатчиком перемещения привод останавливается. Зададим единичное перемещение на зад-влево (отрицательное направление перемещения). При этом напряжения на выходе фазовых дискриминаторов 4 и 5 меняютзнак,Ёключается реле 9 направления перемещения, ключ 18 замыкается и на вход регулятора 10 перемещения поступает сумма напряжений фазовых дискриминаторов и источника 17 эталон ного напряжения, величина которого пропорциональна люфту. При движении 5люфте изменяется выходное напряжени фазового дискриминатора 4, выходное напряжение фазового дискриминатора 5 остается постоянным, которое начинает уменьшаться только после прохождения приводом люфта. Когда рассоглс-сование уменьшится до величины люфта, выходное напряжение фазового дискриминатора 4 изменяет знак на обратный и при дальнейшем движении это напряжение увеличивается до величины напряжения источника 17. По окончании перемещения выходное нап ряжение фазового дискриминатора су лмарное напряжение на входе регулятора 10 перемещения О Уд - выходное напряжение фазового ди криминатора 4, U - напряжение источ ника 17. Рассмотренная работа соответствуе идеализированному приводу, когда все его элементы высокостабильны, а различного- рода возмущения в виде помех на входе, например, регулятора перемещения отсутствуют. В реальных условиях имеются помехи а элементы привода обладают конечной стабильностью, и поэтсму без принятия специальных мер, такой привод совершает автоколе бания в люфте. Рассмотрим это подробнее. Пусть предшествовало перемещение назад-влево. При воздействии помехи или разбалансе фазового дискриминатора 5 возможно отключение репе 9 и тогда на вход регулятора 10 перемещения поступает только напряжение Од , под действием которого вал исполнительного механизма 12 поворачивается впеед-вправо на величину люфта. При включении реле 9 вал исполнительного механизма начинает поворачиваться назад-влево и повернется снова на величину люфта и т.д. Для исключенй1я такого режима реле направления перемещения выполняется сканирующим, частота переключения которого выбирается в зависимости от величины люфта и быстродействия регулятора скорости, включающего усилитель 11, исполнительный механизм 12 и тахогенератор 13. В этом случае при работе в люфте и-отсутствии задания на перемещение на вход регулятора 10 поступает либо сумма напряжений при замкнутом ключе 18, либо только напряжение Уд при разомкнутом ключе, привод занимает положение посередине люфта и совершает колебания относительно него. При появлении задания вправо-вперед реле 9 направления перемещения отключается и перемещение происходит под воздействием только выходных напряжений дискриминаторов 4 и 5. После отработки задания, когда напряжение и5«О, реле 9 начинает сканировать и вал двигателя занимает положение посередине люфта. При задании назад-влево реле 9 включается и перемещение происходит под воздействием трех сигналов (см. выше). После отработки задания снова напряжение , реле 9 снова начина.ет сканировать и вал двигателя занимает положение посередине люфта. Данный электропривод проще извесяных и позволяет повысить точность слежения в пять-семь раз без снижения максимальной скорости отработки задания. Надежность .его работы повышается на 5%. Электропривод используется при создании систем регулирования тяжелых фрезерных станков. Формула изобретения Следящий электропривод, содержавший задатчик перемещения, выход которого через соответствующие сумматоры соединен с входами первого и второго фазовых дискриминаторов, регулятор перемещения, выход которого через последовательно соединенные третий сумматор и усилитель соединен с исполнительным механизмом, выход которого через последовательно соединенные первый редуктор и первый датчик перемещения соединен с вторым входом первого сумматора, через тахогенератор - с вторым входом третьего сумматора и через последовательно соединенные второй редуктор, нелинейное звено типа люфт и второй датчик перемещения - с вторым входом второго сумматора, и реле направления перемещения, вход которого соединен с выходом второго фазового дискриминатора, отличающееся тем, что, с целью повьлиения точности и надежности электропривода, в нем установлены ключ и источник эталонного наи яжёния, выход которого через ключ соединен с первым входом регулятора перемещения, второй и третий входы которого соединены с выходами соответствующих фазовых дискриминаторов, при этом управляющий вход ключа соединен с выходом реле направления перемещения .
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР 392453, кл. G05 В 11/00, 01.04,71.
2.Авторское свидетельство СССР
№ 432454, кл. G05 В 11/01, 03.07.72.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод | 1986 |
|
SU1310775A1 |
| Следящий электропривод с компенсацией люфта | 1981 |
|
SU981929A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДАМИ ПОДАЧ ДВУХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ РАВНОЗНАЧНЫХ ВЕДУЩИХ КООРДИНАТ ЗУБОДОЛБЕЖНОГО СТАНКА | 1991 |
|
RU2025257C1 |
| Безредукторный бесконтактный следящий электропривод | 1981 |
|
SU1001412A1 |
| Следящий электропривод с компенсацией люфта | 1974 |
|
SU535550A1 |
| Привод периодической подачи | 1976 |
|
SU828172A1 |
| Электропривод перемещения механизма подачи станка | 1982 |
|
SU1115191A1 |
| Позиционный электропривод | 1990 |
|
SU1778904A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Реверсивный тиристорный электропри-ВОд C PEBEPCOM пОля | 1979 |
|
SU849400A1 |
HZ
&Т1
