1
Изобретение относится к области автоматического управления.
Известна следящая система с компенсацией люфта в редукторе, содержащая исполнительньш механизм, блок компенсации и последовательно соединенные измерительный блок, усилитель и редуктор 1.
Для компенсации люфта в редукторе требуется специальный привод и механическое суммирующее устройство.
Наиболее близким к изобретению по технической сущности является следящей привод с коррекцией люфта в механической передаче, содержащий задающее устройстство, первый выход которого через последовательно соединенные измеритель рассогласования, сумматор, первый усилитель, исполнительный двигатель и редуктор с люфтом связан с валом объекта регулирования, датчик положения объекта регулирования, выход которого подключен к входу измерителя рассогласования, датчик скорости вала двигателя, выход которого подсоединен к входу сумматора. При этом величина сигнала коррекции зависит от положения выходного элемента нагрузки и постоянна в течение всего времени выбора люфта при работе привода 2.
Зависимость сигнала коррекции от положения выходного элемента нагрузки приводит к тому, что точность коррекции люфта не постоянна. Постоянство величины сигнала коррекции в течение времени выбора люфта (независимость величины сигнала
коррекции от углового положения вала двигателя в люфте) может привести к колебательному переходному процессу. Так, например, в момент пуска следящего привода исходное положение двигателя в люфте может быть различным, поэтому не исключено появление сигнала коррекции при нахождении двигателя в конце люфта.
Целью изобретения является повышение точности привода при пусках с любого исходного положения двигателя в люфте при медленно меняющихся входных воздействиях.
Эта цель достигается тем, что привод дополнительно содержит блок компенсации
люфта, блок форсировки, блок запрета, блок выбора сигнала и второй усилитель. Вход блока компенсации связан с валом двигателя, а выходы - с входом блока выбора сигнала и входами блока запрета,
выход которого через последовательно соединенные блок форсировки, блод выбора сигнала и.второй усилитель подключен к входу сумматора, второй выход задающего устройства подсоединен к входам второго
усилителя, блока форсировки и блока за-.
прета, а третий выход задающего устройства связан с входами блоков выбора сигнала и форсировки.
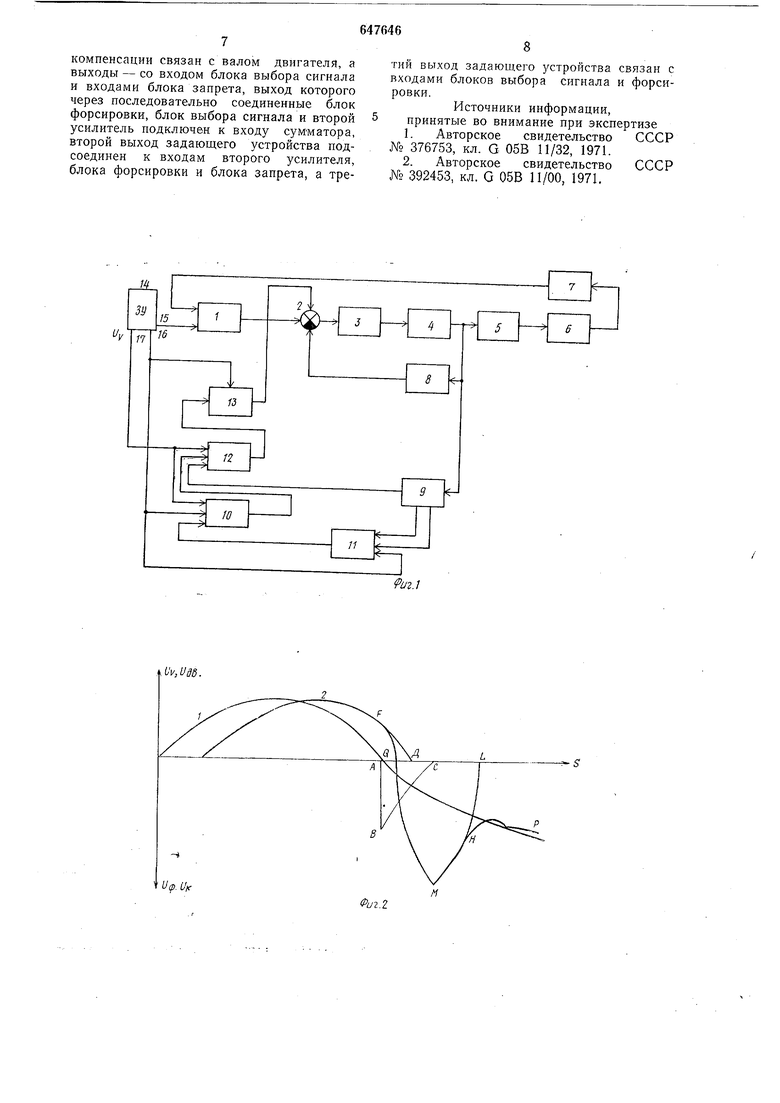
На фиг. 1 нредставлена блок-схема следящего привода с коррекцией люфта в механической передаче; на фиг. 2 приведены кривые скорости изменения входного воздействия (Uv) и изменения скорости исполнительного двигателя («дв), а также движение двигателя с коррекцией перед вхо. дом в люфт, в люфте и в момент выхода из люфта (соответственно кривые 1, 2 и FQMHP).
Здесь: QL - границы люфта; S - путь; ABC - сигнал, формируемый блоком форсировки (Иф); QML - сигнал формируемый блоком компенсации люфта (f/к).
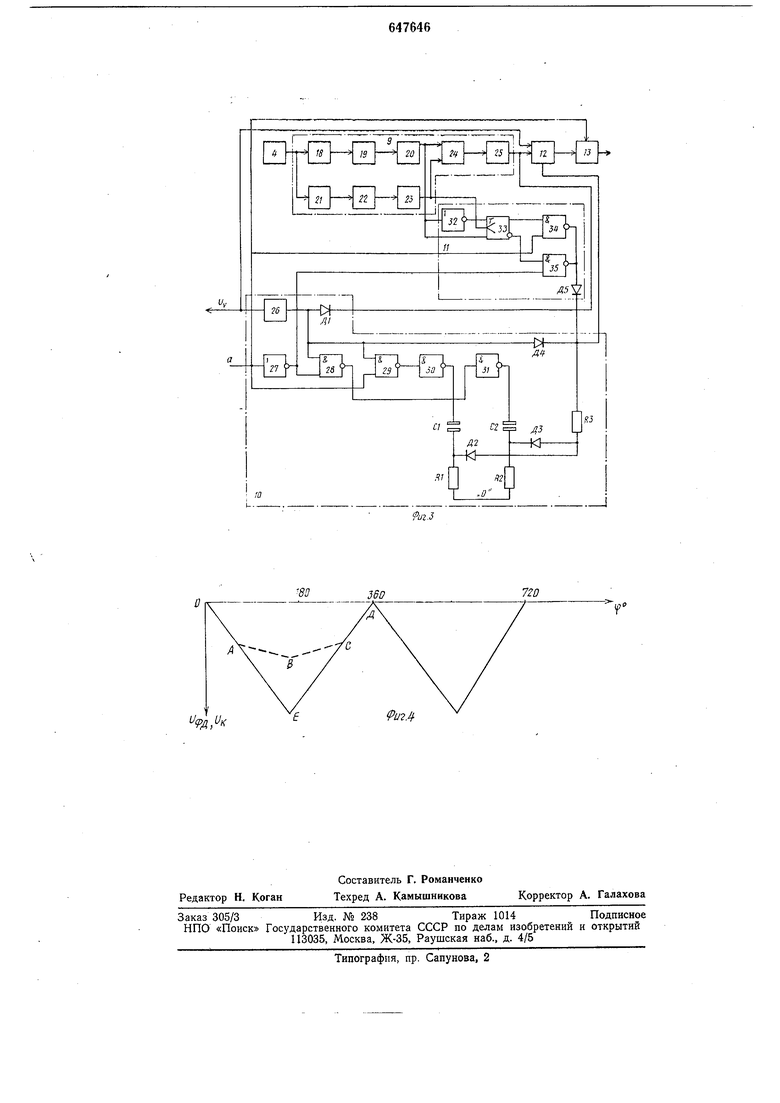
На фиг. 3 приведен один из возможных примеров выполнения принципиальных схем блоков компенсации, форсировки, запрета и выбора напряжения; на фиг. 4 при-ведены характеристики выходных элементов блока компенсации - фазового дискриминатора ОЕД (f/фд) и построителя ОАВСД ({/„).
Следящий привод (фиг. 1) содержит измеритель 1, рассогласования сумматор 2, первый з силитель 3, исполнительный двигатель 4, редуктор с люфтом 5, объект регулирования (нагрузка) 6, датчик 7 положения объекта регулирования, датчик 8 скорости двигателя, блок 9 компенсации люфта, блок 10 форсировки, блок И запрета, блок 12 выбора сигнала, второй усилитель 13 и задающее устройство 14 с первым 15, вторым 16 и третьим 17 выходами.
Блок компенсации люфта (фиг. 3) содержит безлюфтовой редуктор 18, сельсин 19, первый преобразователь 20, редуктор 21 с люфтом (модель люфта), сельсин 22, второй преобразователь 23, фазовый дискриминатор 24, построитель 25.
Блок форсировки 10 (фиг. 3) состоит из логических элементов 26-31, дифференцирующих цепей С1-R1, , развязывающих диодов Д1-ЬД4 и ограничивающего сопротивления R3.
Блок запрета 11 (фиг. 3) содержит логические элементы 32-35 и развязывающий диод Д5.
Входные и выходные сигналы логических элементов 26-35, представляются: «1 - напряжением постоянного тока отрицательной полярности, «о - нулевым уровнем напряжения постоянного тока.
Коррекция люфта в следящем приводе осуществляется следующим образом.
При вхождении в люфт угловое перемещение вала двигателя 4 (фиг. 3) в люфте преобразуется в напряжение постоянного тока отрицательной полярности параболической зависимости от границ люфта к середине. Это преобразование производится блоком 9 компенсации люфта.
Выходное напряжение блока компенсации люфта и сигнал постоянного тока отрицательной полярности Uv, пропорциональный скорости изменения входного воздействия (с выхода 17), подаются через блок 12 выбора напряжения на вход усилителя 13, выход которого подключен на вход управления электроприводом следящей системы (фиг. 1).
Блок 9 компенсации люфта при этом выполняет одновременно функции датчика положения двигателя в люфте и задатчика закона движения в нем, образуя замкнутую систему управления электроприводом в люфте.
При равнозамедленном задании движения в момент изменения знака направления движения (фиг. 2 кривая 1) скорость двигателя в силу его инерционности имеет прежнее направление движения (фиг. 2,
кривая 2, участок РД). Поэтому в момент изменения знака направления движения блок 10 форсировки формирует сигнал, который обеспечивает форсированное торможение (фиг. 2, кривая 2, участок FQ) и
введение двигателя 4 в зону слежения по положению в люфте. Форма сигнала - импульс пилообразной формы отрицательной полярности (фиг. 2, ЛВС) длительностью не более половины времени прохождения
люфта.
Блок форсировки 10 формирует сигнал, не учитывая исходного положения двигателя в люфте и предстоящего направления движения при пуске, что вызывает колебательный переходный процесс, если двигатель перед пуском находился во второй половине люфта. В этом случае сигнал форсировки может принимать значения больше чем {/н, а это приводит к изменению закона движения во второй половине люфта. Для устранения колебательного переходного процесса формируется сигнал «Запрет блоком II, который блокирует сигнал форсировки во второй половине люфта.
При нахождении двигателя в первой половине люфта перед пуском сигнал форсировки, который может быть больше чем UK (фиг. 2, QML), не изменит процесс разгона, так как сигнал UK достаточен для выведения системы электропривода на ограничение по динамическому току двигателя 4.
Отсутствие сигнала «Запрет - напряжение постоянного тока отрицательной полярности.
Наличие сигнала «Запрет - напряжение постоянного тока (О-0,5) в.
Блок 9 компенсации люфта работает следующим образом. При вхождении в люфт вращательное
движение вала двигателя 4 через безлюфтный редуктор 18 передается сельсину 19. Сельсину 22 это движение передается по окончании выбора люфта в редукторе 21 (модели люфта). Вне люфта угловые скорости роторов сельсинов 19 и 22 одинаковы, так как передаточные отношения редукторов 18 и 21 равны.
Сельсины 19 и 22 работают в режиме фазовращения, поэтому во время прохождения люфта фаза выходного напряжения сельсина 19 будет изменяться относительно фазы выходного напряжения сельсина 22. Выходные напряжения сельсинов синусоидальной формы преобразуются в преобразователях 20 и 23 в напряжения прямоугольной формы отрицательной полярности и подаются на вход фазового дискриминатора 24.
Характеристика фазового дискриминатора 24 (фиг. 4, ОЕД) циклически повторяется через каждые 360° изменения фазы одного из входных напряжений. Поэтому передаточные отношения редукторов 18 и 21 выбираются из обеспечения максимального люфта, выраженного в градусах угла поворота ротора сельсина 19, равного 360°.
При люфтах, приведенных к ротору сельсина 19, меньше 360° на выходе фазового дискриминатора 24 будет постоянная составляющая (вне люфта), которая компенсируется введением пороговых элементов и схем на его выходе.
Построитель 25 преобразует линейно возрастающее выходное напряжение фазового дискриминатора 24 от границ люфта к середине в параболическую зависимость (фиг. 4 ОАВСД).
Блок 10 форсировки (фиг. 3) работает следующим образом.
Сигнал направления движения прямой и инверсный с выхода инвертора 27 подается на нижние входы элементов 28 и 29, выходы которых соединены с входами инверторов 30 и 31. Выходы 30 и 31 подключены на входы дифференцирующих цепей С1- R1 и С2-R2.
При на выходе переключателя 26 появляется сигнал «1. Тогда всякое изменение кода направления движения вызовет изменение сигналов на выходах 30 и 31 с О на минус напряжения постоянного тока и наоборот. При этом будет происходить заряд одного конденсатора, например С1, и разряд другого (например С2). Поэтому, при каждом изменении направления движения на объединенных выходах диодов Д2 и ДЗ будут формироваться импульсы пилообразной формы отрицательной полярности, которые через ограничивающее сопротивление R3 передаются на выход.
При /„ 0 на объединенных входах элементов 28 и 29 появляется сигнал «О. Поэтому на выходах 30 и 31 появляется сигнал «О. Конденсаторы С1 и С2 разряжаются и схема подготовлена для следующего пуска в любом направлении.
Сигнал «О, появляющийся на выходе переключателя 26 при (7 0, является и сигналом, запрещающим выход блока 9 компенсации люфта и блока 10 форсировки. Таким образом, обеспечивается ползучая скорость исполнительного двигателя в люфте при отсутствии задания на входе следящего привода.
Блок 11 запрета (фиг. 3) работает следующим образом.
На импульсный вход триггера 33 подается выходное напряжение преобразователя 23, а на потенциальные входы - противофазные напряжения с выхода преобразователя 20. Таким образом, триггер 33 работает в качестве фазового компаратора. Он определяет квадрант нахождения двигателя в люфте. Выходы триггера 29 соединены с верхними входами элементами 34 и 35, а на нижние входы подаются прямой и инверсный сигналы направления движения. Логические элементы 34 и 35 реализуют логическую функцию
Л а-с-а-с,
где Д - сигнал «Запрет («О);
а - направление предстоящего движения;
с - сигнал о нахождении двигателя во второй половине люфта. Сигнал Д чепез диод Д5 подается на выход схемы.
Предлагаемый следящий поивод с коррекцией люфта в механической передаче обеспечивает форсированное прохождение люфта - разгон в первой половине его с максимально допустимым ускорением для данного двигателя и торможения с тем же ускорением во второй половине люфта до скопости большей, чем задается программой движения на величину, определяемую интегральной ошибкой в люфте к моменту выхода из него. Это значительно уменьшает интегоальную ошибку в люфте при медленно меняющихся входных воздействиях и обеспечивает высокое качество переходного процесса при пусках с любых исходных положений двигателя в люфте.
Формула изобретения
Следящий привод с коррекцией люфта в механической передаче, содержащий задающее устройство, первый выход которого соединен с измерителем рассогласования связанным через сумматор, первый усилитель, исполнительный двигатель и редуктор с люфтом с валом объекта регулирования, датчик положения объекта регулирования, выход которого подключен ко входу измерителя рассогласования, датчик скорости вала двигателя, выход которого подсоединен к вхояу сумматора, отличающийс я тем, что, с целью повышения точности привода ПРИ лусках с любогоИСХОДНОГО положения двигателя в люфте при медленно меняющихся входных воздействиях, привод содержит блок компенсации люфта, блок форсировки, блок запрета, блок выбора сигнала и второй усилитель, вход блока
компенсации связан с валом двигателя, а выходы - со входом блока выбора сигнала и входами блока запрета, выход которого через последовательно соединенные блок форсировки, блок выбора сигнала и второй усилитель подключен к входу сумматора, второй выход задающего устройства подсоединен к входам второго усилителя, блока форсировки и блока запрета, а третий выход задающего устройства связан с входами блоков выбора сигнала и форсировки.
Источники информации, принятые во внимание при экспертизе
1Авторское свидетельство СССР № 376753, кл. G 05В 11/32, 1971.
2Авторское свидетельство СССР № 392453, кл. G 05В 11/00, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод с компенсацией люфта | 1981 |
|
SU981929A1 |
| Следящий электропривод с компенсацией люфта | 1980 |
|
SU964574A1 |
| Следящий электропривод с компенсацией люфта | 1974 |
|
SU535550A1 |
| Следящая система | 1988 |
|
SU1524021A1 |
| Устройство для предотвращения автоколебаний в следящей системе | 1982 |
|
SU1084722A1 |
| УСТРОЙСТВО для ДИСКРЕТНОЙ КОРРЕКЦИИ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА С ЛЮФТОМ | 1966 |
|
SU180232A1 |
| Устройство для программного управленияпРиВОдОМ | 1978 |
|
SU798724A1 |
| Электропривод постоянного тока | 1991 |
|
SU1786630A1 |
| Комбинированная следящая система | 1982 |
|
SU1023276A1 |
| Следящая система | 1975 |
|
SU555377A1 |
. (Jv,UdS.
. UK
Фиг.г
9fi,X
fu2
