11
Изобретение относится к подъемным устройствам, в частности к устройств ам, содержащим платформу, опирающуюся на несколько гидродомкратов обеспе чиваюпщх горизонтальное положение при движении платформы.
Цель изобретения - улучшение эксплуатационных характеристик гидроподъемника путем повышения точности горизонтирования платформы.
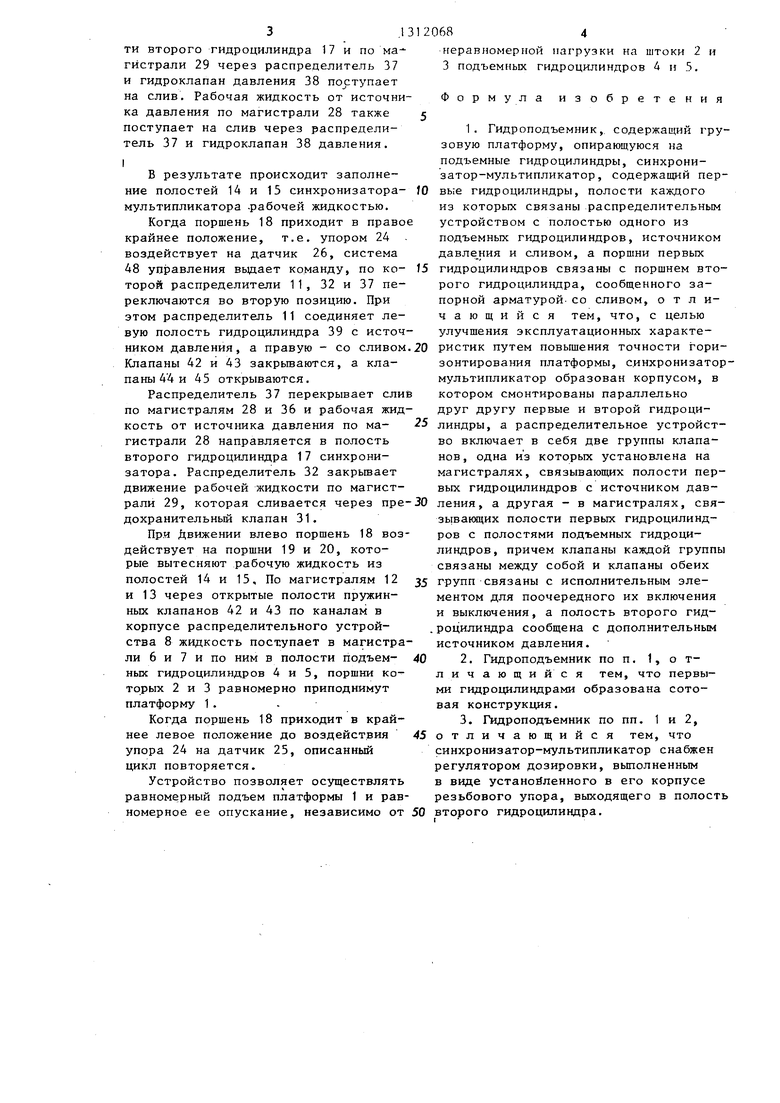
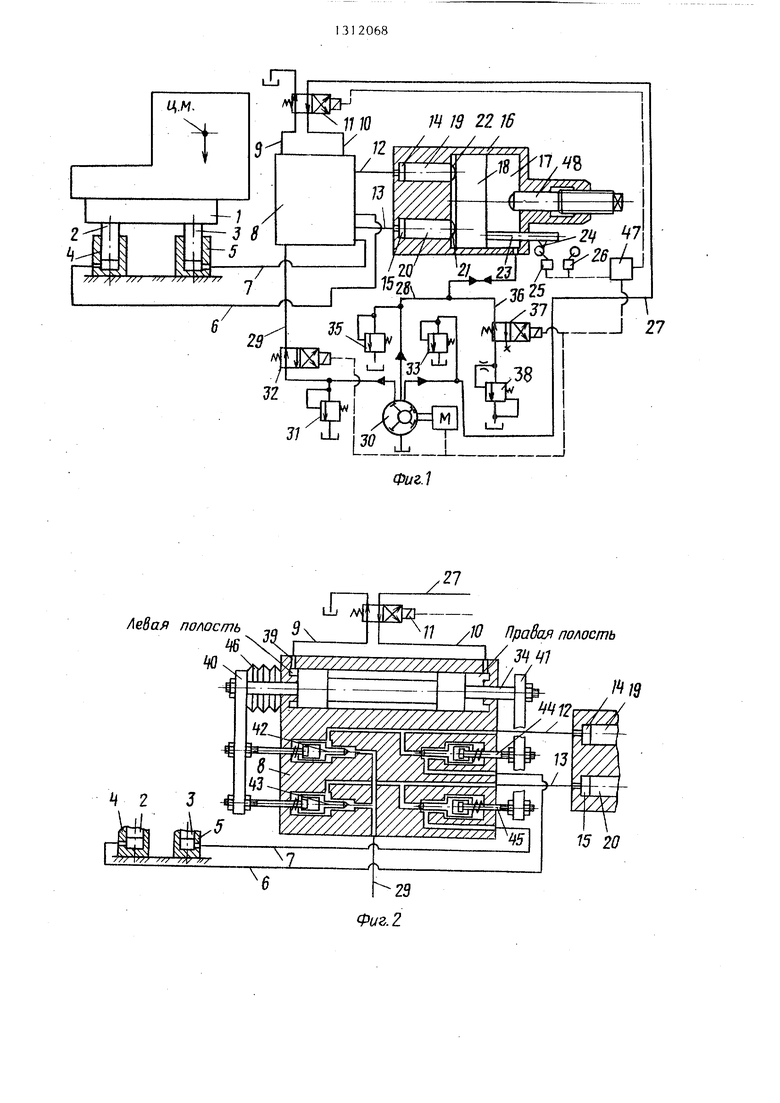
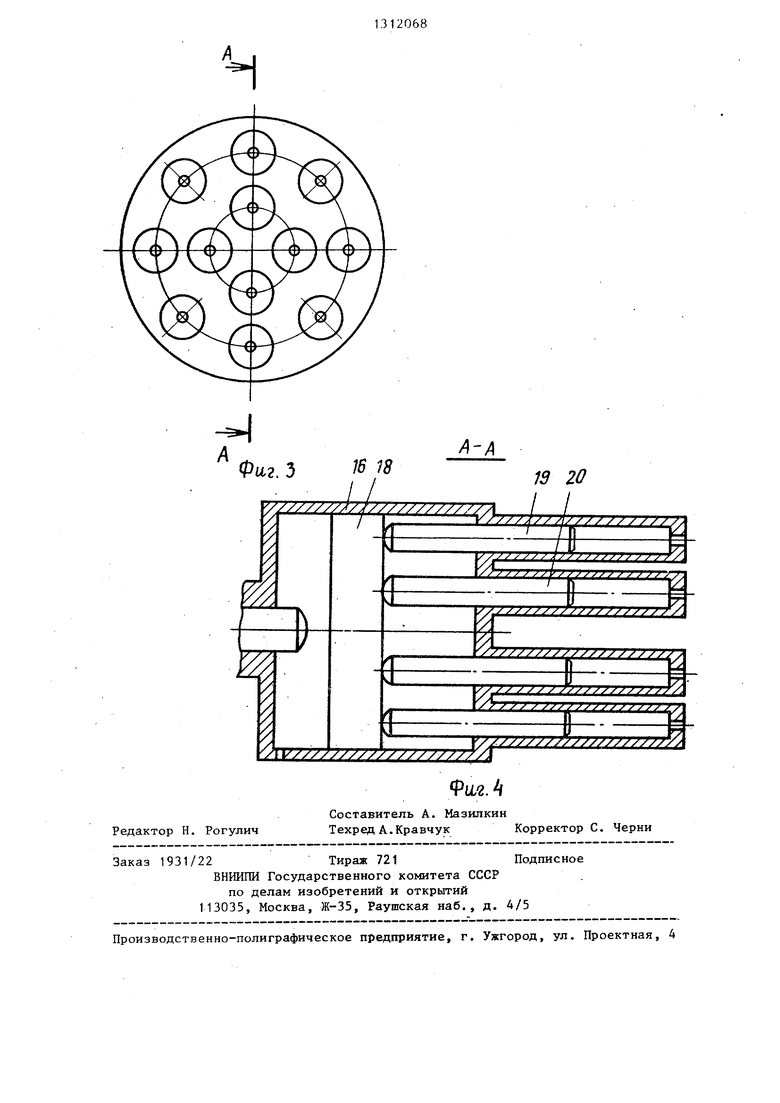
На фиг,1 представлена схема гидроподъемника; на фиг,. 2 - распределительное устройство; на фиг. 3 - синхронизатор-мультипликатор; на фиг. 4разрез А-А на фиг. 3.
Гидроподъемник содержит грузовую платформу 1, опирающуюся на штоки 2 и 3 подъемных гидроцилиндров 4 и 5, полости которых магистралями 6 и 7 сообщаются с распределительным устройством 8. К последнему подведены магистрали 9 и 10 от распределителей 11, Магистралями 12 и 13 распределительное устройство 8 соединено с полостями 14 и 15 первых гидродилинд- ров синхронизатора-мультипликатора 16. Полости 14 и 15 выполнены в виде сотовой конструкции в корпусе 16 синхронизатора-мультипликатора (фиг.3). В корпусе 16 смонтирован второй гидроцилиндр 17 с общим поршнем 18, который входит в контакт с поршнями 19 и 20 через сферические поверхности 21 и 22. На поршне 18 установлена тяга 23, на которой установлен упор 24 который воздействует на датчики 25 и 26 (конечные выключатели) при движении поршня 18 в крайние положения, что позволяет регулировать заданную шаговую величину подъема или опускания платформы 1. Распределительное устройство 8, распределитель 11 и синхронизатор-мультипликатор 16 соединены магистралями 27-29 с источником 30 давления, имеющим три незави- симьпс линии нагнетания. На магистрали 29 установлен предохранительный клапан 31 и распределитель 32, а на магистрали 27 - предохранительньй клапан 33 и распределитель 11, который управляет движением штока 3 распределительного устройства 8. Магистраль 28 со единяет полость второго гидроцилиндра 17 с источником 30 давления. На магистрали 28 установлен предохранительньй клапан 35 и отвод 36, на котором установлен рас
82
пределитель 37, после которого установлен гидроклапан 38 давления.
Распределительное устройство 8 (фиг.2) состоит из корпуса, в кото- ром размещен гидроцилиндр 39, шток 34 которого связан тягами 40 и 41 с двумя группами пружинных клапанов. Тяга 40 связана с левой группой пружинных клапанов 42 и 43, а тяга 41 - с правой группой пружинных клапанов 44 и 45..Кроме этого,в корпусе 8 выполнены каналы для распределения движения рабочей жидкости.
На штоке 34 установлен пакет та- рельча.тых пружин 46, который предназначен для установки распределительного устройства в исходное положение.
Кроме этого, в случае сварки пру- жины 46 перебрасьюают шток 34 в крайнее левое исходное положение, закрывается правая группа пружинных клапа- нов 44 и 45 и запирается жидкость в полостях подъемных цилиндров 4 и 5. Регулировка хода поршня 18 осуществляется резьбовым упором 47.
№дроподъемник работает следующим образом.
Исходное положение для работы гидроподъемника (фиг. 1 и 2): поршень 18 находится в крайнем левом положении, при этом упор 24 воздействует на датчик 25, распределители 11, 32 и 37 устанавливаются в исходное положе- ние для заполнения рабочей жидкостью полостей первых гидроцилиндров 14 и 15 синхронизатора-мультипликатора.
От источника давления рабочая жидкость через распределитель 32 по-магистрали 29 подается в полости пружинных клапанов 42 и 43, а от них по каналам в корпусе 8, по магистралям 12 и 13 - в полости 14 и 15 синхрони
45
50
затора-мультипликатора.
Поршни 19 и 20 воздействуют своими сферическими поверхностями 21 и 22 на поршень 18 и перемещают его
вправо. 1
По магистрали 27 рабочая жидкость
через распределитель 11 поступает в правую полость гидроцилиндра 39, от-, крьшая левую группу пружинных клапанов 42 и 43 и закрывая правую группу 25 пружинных клапанов 44 и 45, воздействуя на них через шток 34 и тяги 40 и 41,
При движении поршня 18 вправо рабочая жидкость вытесняется из полос3,1
ти второго гидроцилиндра 17 и по ма- гистрали 29 через распределитель 37 и гидроклапан давления 38 nojirynaer на слив. Рабочая жидкость от источника давления по магистрали 28 также поступает на слив через распределитель 37 и гидроклапан 38 давления.
I
В результате происходит заполнение полостей 14 и 15 синхронизатора- мультипликатора -рабочей жидкостью.
Когда поршень 18 приходит в правое крайнее положение, т.е. упором 24 . воздействует на датчик 26, система 48 управления вьщает команду, по ко- торой распределители 11, 32 и 37 переключаются во вторую позицию. При этом распределитель 11 соединяет левую полость гидроцилиндра 39 с источником давления, а правую - со сливом.20 ристик путем повьш1ения точности гори- Клапаны 42 и 43 закрьшаются, а кла- зонтирования платформы, синхронизатор- паны 44 и 45 открываются.
Распределитель 37 перекрывает слив
мультипликатор образован корпусом, в котором смонтированы параллельно друг другу первые и второй гидроцилиндры, а распределительное устройство включает в себя две группы клапанов, одна из которых установлена на магистралях, связывающих полости первых гидроцилиндров с источником давпо магистралям 28 и 36 и рабочая жидкость от источника давления по ма- 25 гистрали 28 направляется в полость второго гидроцилиндра 17 синхронизатора. Распределитель 32 закрьшает движение рабочей жидкости по магистрали 29, которая сливается через пре-30 ления, а другая - в магистралях, свя- дохранительный клапан 31.зывающих полости первых гидроцилиндПри Движении влево поршень 18 воз- ров с полостями подъемных гидроцимультипликатор образован корпусом, в котором смонтированы параллельно друг другу первые и второй гидроцилиндры, а распределительное устройство включает в себя две группы клапанов, одна из которых установлена на магистралях, связывающих полости первых гидроцилиндров с источником давдействует на поршни 19 и 20, которые вытесняют рабочую жидкость из полостей 14 и 15, По магистралям 12 и 13 через открытые полости пружинных клапанов 42 и 43 по каналам в корпусе распределительного устройства 8 жидкость поступает в магистрали 6 и 7 и по ним в полости подъемных гидроцилиндров 4 и 5, поршни торых 2 и 3 равномерно приподнимут платформу 1. Когда поршень 18 приходит в крайнее левое положение до воздействия упора 24 на датчик 25, описанный цикл повторяется.
Устройство позволяет осуществлять равномерный подъем платформы 1 и равномерное ее опускание, независимо от 50 второго гидроцилиндра.
неравномерной нагрузки на штоки 2 а 3 подъемных гидроцилиндров 4 и 5.
Формула изобретения
1. Гидроподъемник, содержащий грузовую платформу, опирающуюся на подъемные гидроцилиндры, синхронизатор-мультипликатор, содержащий пер- вь;е гидр о цилиндры, полости каждого из которых связаны распределительным устройством с полостью одного из подъемных гидроцилиндров, источником давле ния и сливом, а поршни первых гидроцилиндров связаны с поршнем второго гидроцилиндра, сообщенного запорной арматурой- со сливом, отличающийся тем, что, с целью улучшения эксплуатационных характеристик путем повьш1ения точности гори- зонтирования платформы, синхронизатор
ления, а другая - в магистралях, свя- зывающих полости первых гидроцилиндмультипликатор образован корпусом, в котором смонтированы параллельно друг другу первые и второй гидроцилиндры, а распределительное устройство включает в себя две группы клапанов, одна из которых установлена на магистралях, связывающих полости первых гидроцилиндров с источником давлиндров, причем клапаны каждой группы связаны между собой и клапаны обеих
групп связаны с исполнительным элементом для поочередного их включения и выключения, а полость второго гид- роцилиндра сообщена с дополнительным источником давления.
2. Гидроподъемник по п. 1, о т- личающийся тем, что первыми гидроцилиндрами образована сотовая конструкция.
3. Гидроподъемник по пп. 1 и 2,
отличающийся тем, что синхронизатор-мультипликатор снабжен регулятором дозировки, вьшолненным в виде установленного в его корпусе резьбового упора, выходящего в полость
Ц.М.
t
/
ПЮ
,/
J/
Щ /д 22 16
/ у / /
2Ц 7
i.U
Ы RSLA %
, r
I 21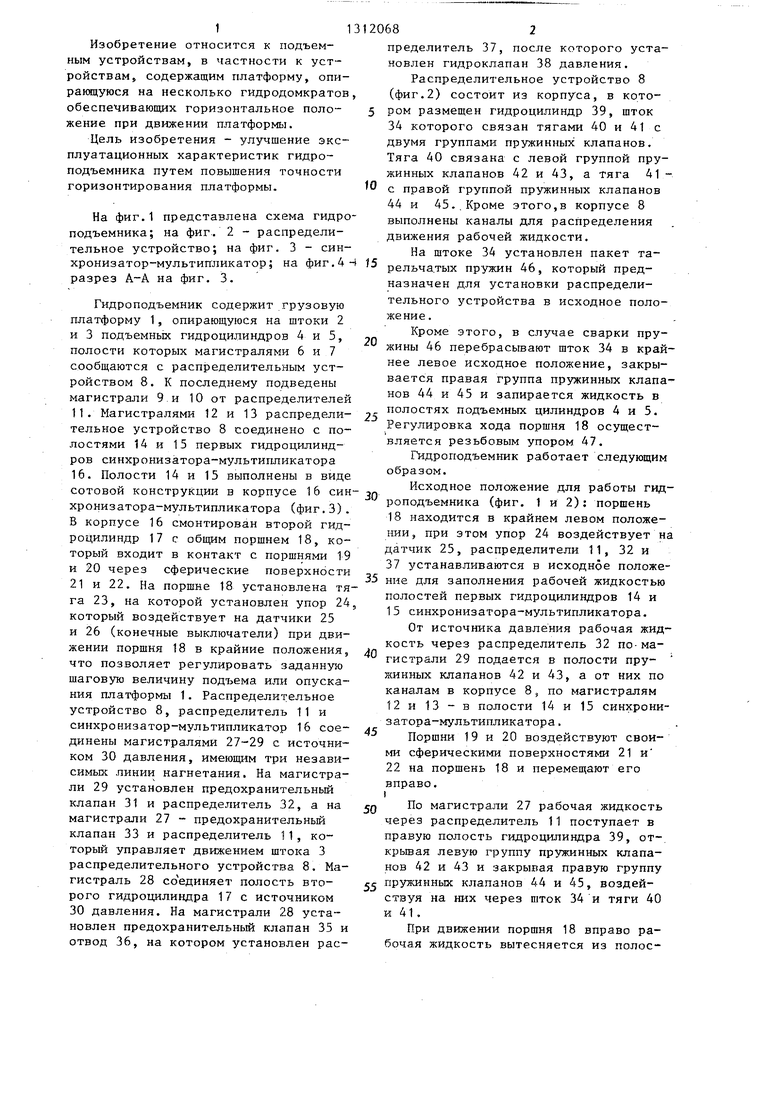
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПРИВОД | 1992 |
|
RU2056550C1 |
| Установка для деформирования трубчатых заготовок | 1982 |
|
SU1065061A1 |
| Гидропривод грузовой лебедки стрелового крана | 1984 |
|
SU1294760A1 |
| Стенд для испытания гидроподъемников | 1990 |
|
SU1742666A2 |
| Распределительный гидроклапан | 1985 |
|
SU1308991A2 |
| Гидропривод | 1985 |
|
SU1286829A1 |
| Машина для контактной стыковой сварки | 1985 |
|
SU1299738A1 |
| ГИДРОПРИВОД ПОДЪЕМНОГО МЕХАНИЗМА | 1998 |
|
RU2138699C1 |
| Прессующее устройство | 1984 |
|
SU1171269A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2002 |
|
RU2213042C1 |
Изобретение относится к области грузоподъемных устройств, в частности к подъемным устройствам, содержащим платформу, опирающуюся на несколько гидродомкратов. Целью изобретения является улучщениё эксплуатационных характеристик гидроподъемника путем по- вьшения точности горизонтирования платформы. Гидроподъемник содержит платформу, опирающуюся на несколько подъемных гидроцилиндров, связанных с синхронизатором-мультипликаторомi выполненным в виде смонтированных в корпусе параллельно друг другу первых и второго гидроцилиндров. Полости первых гидроцилиндров образуют сотовую конструкцию, поршни первых гидроцилиндров взаимодействуют с поршнем второго гидроцилиндра. Синхронизатор-мультипликатор снабжен регулятором дозировки, выполненным в виде резьбового упора. 2 з.п. ф-лы, 4 ил.
полость
W
iL /vf
Ч
77 y/g
г
У////////////////////ЛП V /
77 y/g пометь
I/
25
.2
Редактор Н. Рогулич
Составитель А. Мазилкин
Техред А.Кравчук Корректоре. Черни
Заказ 1931/22Тираж 721Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
а-гЛ
| Гидроподъемник | 1974 |
|
SU503819A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
