мости устройства и использования в качестве едирого энергоносителя ваку ума. На основание 1 жестко закреплена стойка с каналом, несущая механическую руку, выполненную в виде двуплечего рачага 8, и привод ее перемещения, включающий упругую криволи- лейную трубку 4 (пружину Бурдона),, связанную посредством каналов, выполненных в основании, с источником создания вакуума. На двуплечем рычаге 8, гаарнирно установленном на стойке, установлен вакуумный захват 12 с возможностью взаимодействия с упорами 15
1
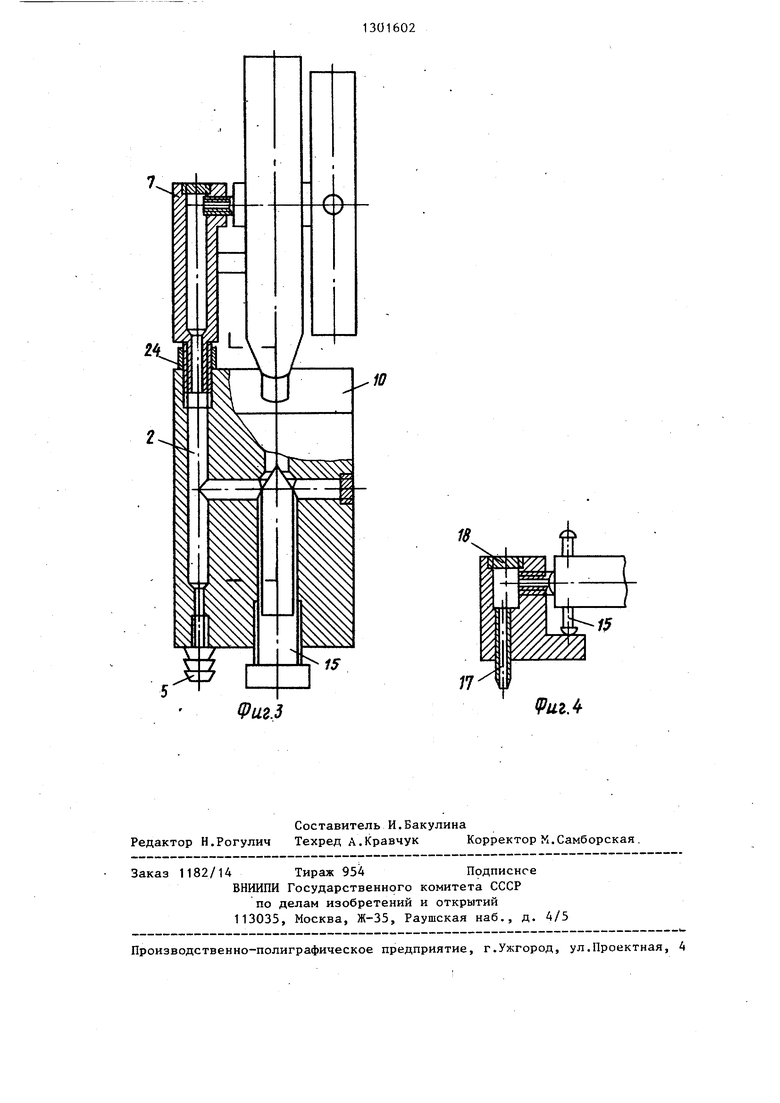
Изобретение относится к точному приборостроению, в частности к микроманипуляторам, и может быть исполь- - зовано как отдельной модуль сборочной линии в производстве изделий электронной техники.
Цель изобретения - упрощение управления и обслуживания за счет самоуправляемости устройства и использования в качестве единого энергоносителя вакуума.
На фиг, 1 изображен манипулятор, общий вид с разрезом; на фиг. 2 - разрез в горизонтальной плоскости, проходящей через ось двуплечего рычага манипулятора; на фиг. 3 - манипулятор, вид сбоку; на фиг. 4 - захват и упоры, ограниу1ивающие угол поворота захвата, разрез.
На основании 1, имеющем сеть каналов 2, расположены верхний штуцер 3 для соединения с приводом перемещения, например, упругой криволинейной трубкой 4 (пружиной Бурдона), нижний штуцер 5 для соединения с системой энергопитания, включающей источник создания вакуума, и дроссель 6, который служит для регулирования скорости создания вакуума в пружине 4 Бурдона.
На основании 1 жестко закреплена стойка 7, выполненная ь виде Г-об- разного рычага. Механическая рука выполнена в виде, двуплечего рычага В жестко закрепленного на втулке 9, установленной с возможностью свободдвуплечего рычага 8, иа другом конце которого закреплен противовес 11,. При подаче вакуума от источника вакуума вакуум поступает через каналы основания 1, стойки двуплечего рычага 8 в вакуумный захват 12. Происходит присос детали 25, а за счет деформации трубки 4 перемещение вакуумного захвата в позиций выгрузки. В позиции выгрузки в манипулятор подается атмосферное давление, что приводит к отрыву детали от вакуумного захвата и его перемещению в исходное положение . 4 ил.
ного вращения вокруг оси 10, жестко закрепленной на свободной полке Г-об- разного рычага 7, при этом на одном конце двуплечего рычага 8 соосно ему
и посредством, втулки 9 смонтирован дополнительно введенный противовес 11. А вакуумный захват 12, жестко за:креп- ленный на оси 13, выполнен с возможностью свободного вращения во втулке 14, закрепленной на другом конце двуплечего рычага 8, вокруг оси, перпендикулярной плоскости его вращения, и с возможностью взаимодействия с упорами 15, закрепленными на втулке
14, обеспечивающими угол поворота вакуумного захвата 12, При этом пружина 4 Бурдона одним концом жестко закреплена на верхнем штуцере 3 основания 1, а другим - на щелевом зажиме 16, плотно охватывающем втулку 9.
Для создания вакуума в вакуумном захвате оси 10 и 13, втулки 9 и 14, двуплечий рьтаг В и стойка 7 имеют вакуумные каналы. Противовес 11, упоры 15, двуплечий рычаг 8 и зажим 16 выполнены с возможностью регулирования их положения.
Вакуумньш захват 12 выполнен в виде Г-образного корпуса, имеющего вертикальный вакуумный канал, в который снизу вставлен капилляр 17 для захвата деталей, а сверху ввернута пробка 1В, и плоскую горизонтальную пол
ку, которая предназначена для контакта с упорами 15.
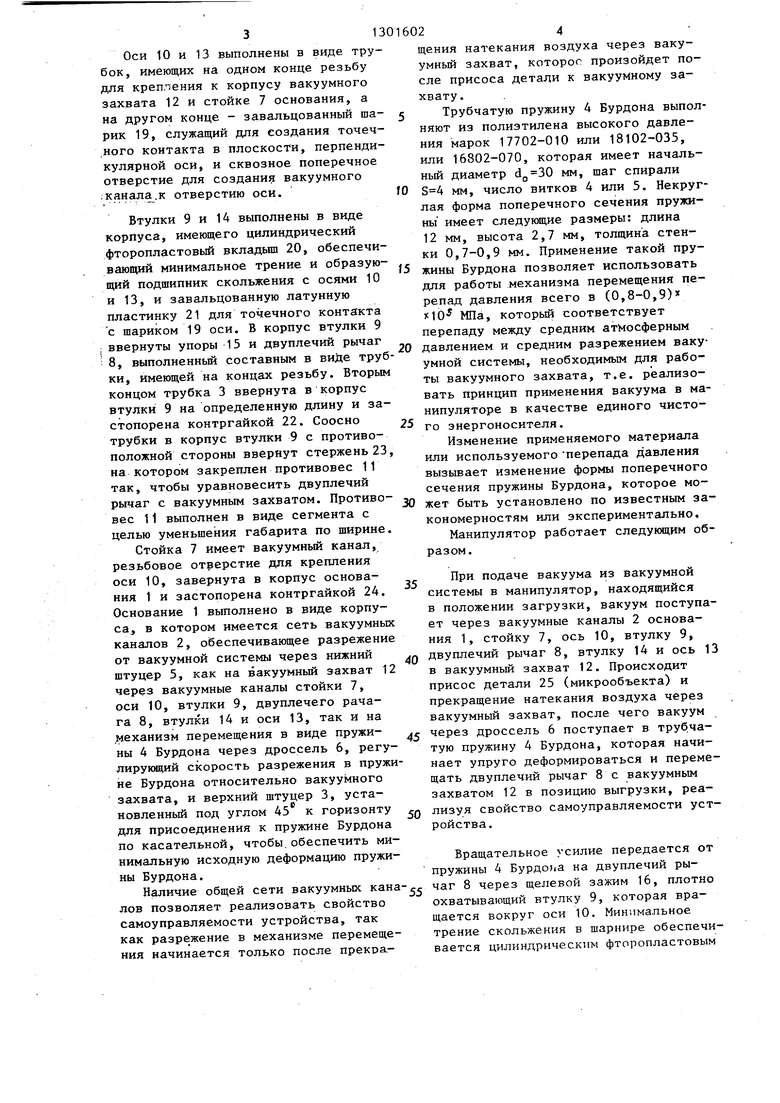
Оси 10 и 13 выполнены в виде трубок, имеющих на одном конце резьбу для крепления к корпусу вакуумного захвата 12 и стойке 7 основания, а на другом конце - завальцованный шарик 19, служащий для создания точеч- ного контакта в плоскости, перпендикулярной оси, и сквозное поперечное отверстие для создания вакуумного кггнала.к отверстию оси.
Втулки 9 и 14 выполнены в виде корпуса, имеющего цилиндрический фторопластовьй вкладьпп 20, обеспечивающий минимальное трение и образующий подшипник скольжения с осями 10 и 13, и завальцованную латунную пластинку 21 для точечного контакта с шариком 19 оси. В корпус втулки 9 ввернуты упоры 15 и двуплечий рычаг 8, выполненный составным в виДе трубки, имеющей на концах резьбу. Вторым концом трубка 3 ввернута в корпус втулки 9 на определенную длину и застопорена контргайкой 22, Соосно трубки в корпус втулки 9 с противоположной стороны ввернут стержень 23, на котором закреплен противовес 11 так, чтобы уравновесить двуплечий рычаг с вакуумным захватом. Противовес 11 выполнен в виде сегмента с целью уменьшения габарита по ширине.
Стойка 7 имеет вакуумный канал, резьбовое отверстие для крепления оси 10, завернута в корпус основания 1 и застопорена контргайкой 24. Основание 1 выполнено в виде корпуса, в котором имеется сеть вакуумных каналов 2, обеспечивающее разрежение от вакуумной системы через нижний штуцер 5, как на вакуумный захват 12 через вакуумные каналы стойки 7, оси 10, втулки 9, двуплечего рача- га 8, втулки 14 и оси 13, так и на еханизм перемещения в виде пружины 4 Бурдона через дроссель 6, регуирующий скорость разрежения в пружие Бурдона относительно вакуумного захвата, и верхний штуцер 3, установленный под углом 45 к горизонту ля присоединения к пружине Вурдона по касательной, чтобы.обеспечить миимальную исходную деформацию пружины Вурдона.
Наличие общей сети вакуумных кана- чаг 8 через щелевой зажим 16, плотно
охватывающий втулку 9, которая вращается вокруг оси 10. Минимальное трение скольжения в шарнире обеспечи вается цилиндрическим фторопластовым
лов позволяет реализовать свойство самоуправляемости устройства, так как разре жение в механизме перемещения начинается только после прекращения натекания воздуха через вакуумный захват, которое произойдет после присоса детали к вакуумному захвату.
Трубчатую пружину 4 Бурдона выполняют из полиэтилена высокого давления марок 17702-010 или 18102-035, или 16802-070, которая имеет начальный диаметр мм, шаг спирали
0 мм, число витков 4 или 5. Некруглая форма поперечного сечения пружины имеет следукидие размеры: длина 12 мм, высота 2,7 мм, толщина стенки 0,7-0,9 мм. Применение такой пру5 жины Бурдона позволяет использовать для работы механизма перемещения перепад давления всего в (0,8-0,9) МПа, который соответствует перепаду между средним атмосферным давлением и средним разрежением вакуумной системы, необходимым для работы вакуумного захвата, т.е. реализовать принцип применения вакуума в манипуляторе в качестве единого чистого энергоносителя.
Изменение применяемого материала или используемого перепада давления вызывает изменение формы поперечного сечения пружины Бурдона, которое мо0 жет быть установлено по известным закономерностям или экспериментально.
Манипулятор работает следующим образом.
0
5
При подаче вакуума из вакуумной системы в манипулятор, находящийся в положении загрузки, вакуум поступает через вакуумные каналы 2 основания 1, стойку 7, ось 10, втулку 9, двуплечий рычаг 8, втулку 14 и ось 13 в вакуумный захват 12. Происходит присос детали 25 (микрообъекта) и прекращение натекания воздуха через вакуумный захват, после чего вакуум через дроссель 6 поступает в трубчатую пружину 4 Бурдона, которая начинает упруго деформироваться и перемещать двуплечий рычаг 8 с вакуумным захватом 12 в позицию выгрузки, реализуя свойство самоуправляемости устройства.
Вращательное усилие передается от пружины 4 Бурдоьа на двуплечий рычаг 8 через щелевой зажим 16, плотно
охватывающий втулку 9, которая вращается вокруг оси 10. Минимальное трение скольжения в шарнире обеспечивается цилиндрическим фторопластовым
вкладьппем 20 и точечным контактом шарика 19 в торцовой плоскости.
При вращении двуплечего рычага 8 вакуумньй захват 12 под действием . собственного веса вращается в анало- гичном шарнире, образованном втулкой и осью 2, находясь постоянно в вертикальном положении. В конечном положении в позиции выгрузки упор . 5 опирается на горизонтальную полку корпуса вакуумного захвата 1, ограничивая угол его поворота.
В позиции выгрузки вакуум выключается и в манипулятор подается атмосферное давление, что Приводит к от- р ыву детали от вакуумного захвата 12, т.е. к разгерметизации манипулятора, после чего пружина 4 Бурдона разожмется и переместит двуплечий рычаг 8 с вакуумным захватом 1 в исходное положение.
Конструкция манипулятора обеспечивает максимальные усилия и ускорения в начальньш момент движения с последующим плавным замедлением как на прямом, так и на обратном ходе, а наличие вакуума в шарнирах при перемещении деталей обеспечивает одностороннюю выборку люфтов, повьшая точность «работы манипулятора при уклад- ке микрообъектов.
Формула изобретения
Вакуумный манипулятор, содержащий основание, имеющее каналы, жестко закрепленную на нем стойку со сквозным каналом, несущую механическую руку с захватом, и привод ее перемещения, включающий упругую криволинейную трубку, а тa kжe источники энергоносителя, отличающийся тем, что, с целью упрощения управления и расширения технологических возможностей, стойка выполнена в виде Г-образного рычага, а механическая рука выполнена в виде двуплечего рычага с упорами, шарнирно установленного на свободной-полке Г-образного рычага с возможностью поворота относительно нее, при этом на одном конце двуплечего рычага закреплен дополнительно введенный противовес, а захват шарнирно установлен на другом конце двуплечего рычага с возможностью вращения вокруг оси, перпендикулярной плоскости вращения двуплечего рычага, и взаимодействия с указанными упорами, причем двуплечий рычаг и захват имеют каналы, которые сообщены друг с другом и с каналами основания, стойки, механизма перемещения и с источником энергоносителя (вакуума).
Vtiz.l
fpuz.s
77
fpuzA

| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумное захватное устройство | 1980 |
|
SU925836A1 |
| Устройство для закрепленияРЕНТгЕНОВСКОгО АппАРАТА | 1978 |
|
SU814631A1 |
| Микроманипулятор для установки узлов механизма часов | 1982 |
|
SU1083154A1 |
| Устройство для укладки листов в пирамиду | 1989 |
|
SU1776644A1 |
| Автооператор | 1986 |
|
SU1364430A1 |
| Устройство для автоматической подачи заготовок и выдачи готовых задников к машине для формования задников | 1955 |
|
SU107378A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ИЗДЕЛИЙ ЭЛЕКТРОННОЙ ТЕХНИКИ | 1992 |
|
RU2034362C1 |
| Устройство для маркировки и укладки дискообразных изделий | 1987 |
|
SU1504167A1 |
| Вакуумный захватный орган | 1980 |
|
SU946743A1 |
| Вакуумный захватный орган | 1981 |
|
SU1011308A1 |
Изобретение относится к точному приборостроению, в частности к микроманипуляторам, и может быть использовано как отдельный модуль сварочной линии в производстве изделий электронной техники. Целью изобретения является упрощение управления и обслуживания за счет самоуправляеВыгрузка fpuz.1 3tttpy$iru в. со 00 О р:
Составитель И.Бакулина Редактор Н.Рогулич Техред А.Кравчук Корректор К.Самборская.
Заказ 1182/14 Тираж 954Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Андреева Л.Е | |||
| Упругие элементы приборов | |||
| - М.: Машиностроение, 1981, с | |||
| Водяной двигатель | 1921 |
|
SU325A1 |
| Деревянная повозка с кузовом, устанавливаемым на упругих дрожинах | 1920 |
|
SU248A1 |
