Изобретение относится к ленточным конвейерам, работающим наклонно в вертикальной и горизонтальной плоскостях, а именно сенараторах семян типа «Горка.
Цель изобретения - повышение надежности центрирования ленты и повышение производительности.
На фиг. 1 показан обший вид устройства для центрирования ленты, на фиг. 2 - система дискретно-импульсного управления перемещения опор.
Устройство сод,ержит натяжной барабан 1, ленту 2, опоры 3, винтовой механизм натяжения 4, реверсивный шаговый электропривод, состоящий из храповых зубчатых механизмов с наружным зацеплением 5 и 6 и тяговых электромагнитов 7 и 8, шаговый электропривод нижней опоры 9 и 10, группы датчиков положения лепты 11 и 12, причем датчики 12 установлены под лептой, элемента И 13, элемепта, И - НЕ 14, элемента ИЛИ 15, тактового задатчика 16. усилителей 17 и регистра сдвига 18.
Датчики 11 попарно подключены к элементу И 13.1, а датчики 12 -- попарно к элементу И - НЕ 14. Выход элементов 13.1 и 14 подключены через элемент ИЛИ 15 к тактовому задатчику 16, выход которого подключеп ко входам элементов формирования сигнала для управления электроприводами 13.2 и 13.3.
На вторые входы элементов 13.2 и 13.3 подключены выходы элементов 13.1 и 14. Элементы 13.2 и 13.3 через усилители 17 формируют управляющие сигналы на реверсивный П1аговый электропривод верхней опоры, т. е. электромагниты 7 и 8.
Трехтактпый регистр сдвига 18 управляющим входом подключен к выходу элемента 13.3, а входом сброса - к выходу элемента 13.2. Выход регистра сдвига 18 через усилитель 17 подключеп к электроприводу нижней опоры, т. е. электромагниту 10.
Устройство работает следуюпхим образом.
Установка ленты 2 в заданное положение производится без нагрузки, вручную путем перемещения опор 3 винтовыми механизмами 4, а затем устройство переводится в автоматический режим. Из-за комплексного воздействия возмущающих факторов на .ченту, она, как правило, через определенный промежуток времени работы транспортера начнет смещаться в ту или иную сторону.
Например, сползание ленты на обоих барабанах вниз, приводит к срабатыванию обоих датчиков 12, которые выдадут сигналы на элемент И --НЕ 14. Элемент 14 вы- лТ.аст разрешающий сигнал через элемент 15 на тактовый задатчик 16 и элемент управления 13.3. Тактовый задатчик с заданным интервалом и длительностью будет выдавать импульсы для управления электромагнитом 8. При этом усилие электромагнита 8
через храповый механизм 6 передается винту 4, который перемещает опору 3 вправо. Под действием увеличивающего усилия в нижней опоре, лента переместится в началь- ное положение. При перемещении ленты вверх включится в работу второй канал системы регулирования, опора переместится влево и лента сместится вниз.
Лента через несколько часов работы рас
тягивается и имеет тенденцию к сползанию. Для компенсации растяжения ленты необходимо нижнюю опору передвинуть на один шаг влево. Установить, что произошло растяжение ленты можно с помощью регистра сдвига 18. Если перемещение ленты вверх и вниз чередуется с каким-то периодом, то на выходе регистра сдвига сигнала нет, так как управляющий сигнал элемента 13.3 сбрасывается сигналом от элемента 13.2. Если после трехкратного перемещения опоры 3 вправо лента не вернется в исходное состояние, то значит она растянулась. На выходе регистра сдвига 18 появится сигнал и электромагнит 10 переместит нижнюю опору 3 влево на заданный шаг, тем самым компенсируя растяжение ленты.
За счет применения предлагаемого устройства будет сэкономлено время на переналадку механизма для компенсации растяжения ленты, т. е. обеспечение роста производительности. Датчики 12 установлены под лентой у верхних опор барабанов будут защищены от загрязнения. В целом предлагаемое устройство обеспечивает снижение эксплуатационных затрат, и как следствие рост производительности. При этом достигается экономический эффект 25 руб. за
тонну отсо)тированного продукта.
Формула изобретения
Устройство для автоматического центрирования движущейся бесконечной ленты, содержащее опоры и установленные в них приводной и натяжной барабаны, винтовые .механизмы перемещения опор натяжного барабана, электропривод одного из механизмов, выполненного в виде двух электромагнитов с храповыми механизма.ми, и блок регулирования, включающий тактовые задатчики, датчики смещения ленты, попарно установленные на каждой - опоре, элемент И, с входами которого соединена одна пара датчиков, усилители, отличающееся тем, что, с целью повышения надежности центрирования ленты, оно снабжено электроприводом другого механизма перемещения опор, содержащим электромаг- пит и храповый механизм, а в блок ре- улирования введены элементы И - НЕ,
ИЛИ, дополнительные элементы И и регистр сдвига, причем другая пара датчиков установлена под лентой и соединена с входами элемента И - НЕ, выход элемента И соединен с первыми входами дополнительного элемента И и элемента ИЛИ, второй вход последнего соединен с выходом элемента И-НЕ и первым входом второго дополнительного элемента И, выход элемента ИЛИ через тактовый задатчик соединен с вторыми входами дополнительных элементов И, выходы которых через усилители соединены с электромагнитами и непосредственно с входами регистра сдвига, выход которого через усилитель соединен с дополнительным электромагнитом.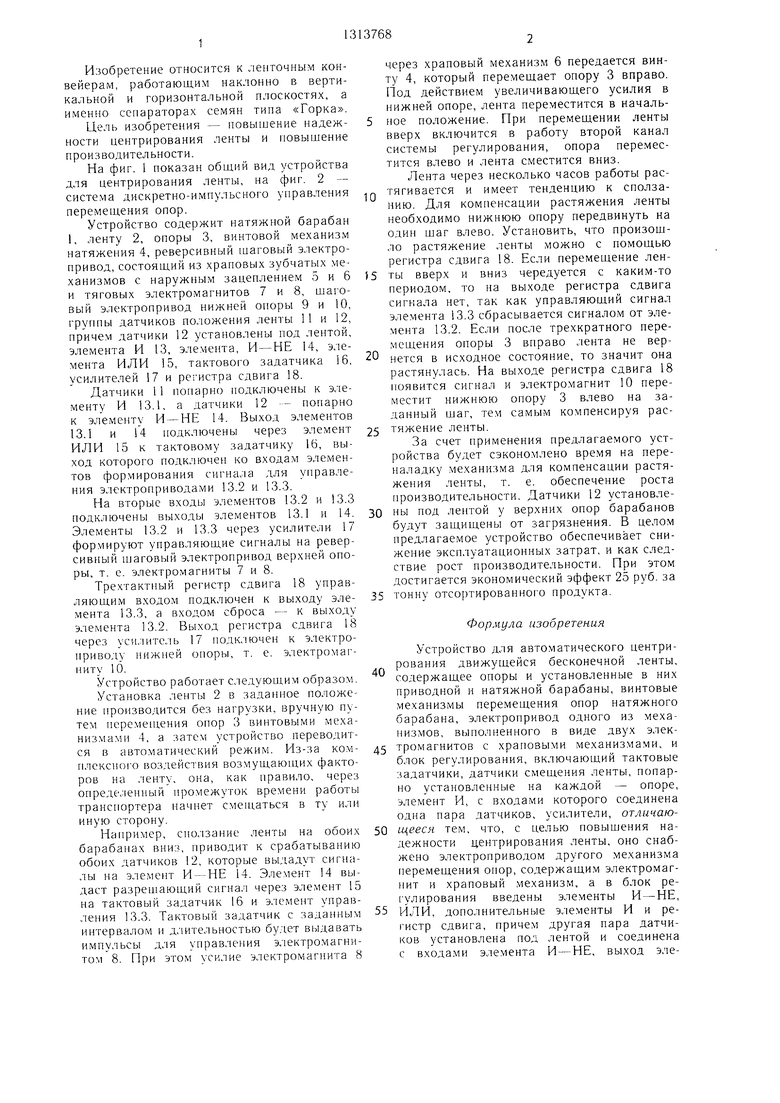
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического центрирования бесконечной ленты | 1987 |
|
SU1475860A1 |
| Устройство для автоматического центрирования бесконечной ленты | 1986 |
|
SU1384486A1 |
| Устройство для автоматического центрирования бесконечной ленты | 1985 |
|
SU1252575A1 |
| Диэлектрический сепаратор | 1984 |
|
SU1238798A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ПРОСТРАНСТВЕННОЙ ИЗБИРАТЕЛЬНОСТИ АНТЕНН | 1992 |
|
RU2082986C1 |
| Устройство для контроля лоических блоков | 1986 |
|
SU1453409A1 |
| Способ непрерывной вулканизации ленты из сырой резины или каучука | 2016 |
|
RU2641280C2 |
| Способ и комплекс автоматического регулирования параметров перемещения скипового подъема доменной печи | 2020 |
|
RU2751364C1 |
| Устройство для управления @ -фазным шаговым двигателем | 1988 |
|
SU1534741A1 |
| Устройство для сопряжения ЭВМ с магистралью локальной сети | 1990 |
|
SU1839258A1 |
Изобретение относится к автоматизации конвейерного транспорта и позволяет повысить надежность центрирования ленты (Л) конвейера и повысить его производительность. Устройство содержит приводной и натяжной барабаны, установленные в опорах с механизмами их перемещения. фиг. Z и блок регулирования. Электроприводы механизмов перемещения выполнены в виде электромагнитов (ЭМ) 7, 8 и храповых механизмов. Блок регулирования содержит тактовые задатчики 16, датчики 11 и 12 смещения Л, попарно установленные на каждой опоре, элементы И 13, и - НЕ 14, ИЛИ 15, регистр 18 сдвига и усилители 17. Датчики 12 установлены над Л. Сползание Л на обоих барабанах вниз приведет к срабатыванию датчиков 12. Они выдадут сигналы на элемент 14 И - НЕ. С его выхода разрепгаюпхий сигнал через элемент 15 ИЛИ, задатчик 16 и элемент 13 И поступит на ЭМ 7 или 8. Усилие ЭМ 7 или 8 через соответствующий храповой механизм передается механизму перемещения, который перемещает опору вправо или влево. При растяжении Л появится сигнал на выходе регистра 18 сдвига и ЭМ 10 переместит нижнюю опору на заданный щаг влево, компенсируя этим растяжение. 2 ил. а (Л I / СО СО Ci оо 18 17 10
фаг. /
| Патент США № 3543597, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Устройство для автоматического центрирования бесконечной ленты | 1985 |
|
SU1252575A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
