J ел
00
оэ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического центрирования бесконечной ленты | 1986 |
|
SU1384486A1 |
| Устройство автоматического регулирования положения ленты в роторной машине непрерывного литья | 1980 |
|
SU944771A1 |
| Устройство раздачи корма | 1987 |
|
SU1450795A1 |
| Устройство для раздачи корма | 1988 |
|
SU1546028A1 |
| Стенд для испытаний на прочность | 1985 |
|
SU1392416A1 |
| Устройство для управления шаговым электродвигателем | 1974 |
|
SU744888A1 |
| Устройство для раздачи корма | 1990 |
|
SU1692435A1 |
| Устройство для моделирования комплекса прокатного производства | 1979 |
|
SU864303A1 |
| Электропривод переменного тока | 1987 |
|
SU1473062A1 |
| Устройство для управления процессом непрерывного горизонтального литья заготовок | 1982 |
|
SU1100042A1 |
Изобретение относится к ленточным конвейерам, работающим наклонно в вертикальной и горизонтальной плоскостях. Цель - повышение точности центрирования. Для этого устройство снабжено датчиком (Д) 12 счета импульсов, формирователем 16 импульсов и коммутатором (К) 14. Выход Д 12 подключен к входу блока выбора режима (БВР) 13 выравнивания ленты и к входу формирователя 16 импульсов, выход которого подключен к одному из входов К 14. К второму входу К 14 подключен выход БВР 13. Выходы К 14 соединены с соответствующими реверсивными шаговыми электроприводами механизмов натяжения ленты. На ленте размещен контролирующий элемент в виде двух меток с возможностью взаимодействия с установленными под лентой Д 10-12 контроля положения ленты и подключены к БВР 13. Метки имеют форму гребенки с обращенными один к другому зубьями. Длина зубьев пропорционально увеличивается по ходу перемещения ленты. Контролирующий элемент дает информацию о величине смещения ленты. При смещении ленты вверх последовательно срабатывают Д 10 и 12, а при смещении вниз - Д 11 и 12. С выхода Д 12 сигнал поступает в формирователь 16 импульсов, выходной сигнал которого через К 14 включает соответствующий электромагнит 8 или 9, который посредством электропривода перемещают опору влево или вправо. При сползании ленты срабатывают все Д 10-12 одновременно и посредством выходного сигнала БВР 13 электропривод 15 ленты отключается. 4 ил.
Фиг. 2
Изобретение относится к ленточным конвейерам, работающим наклонно в вертикальной и горизонтальной плоскостях, и может найти применение в сепараторах семян типа «Горка.
Целью изобретения является повышение точности центрирования.
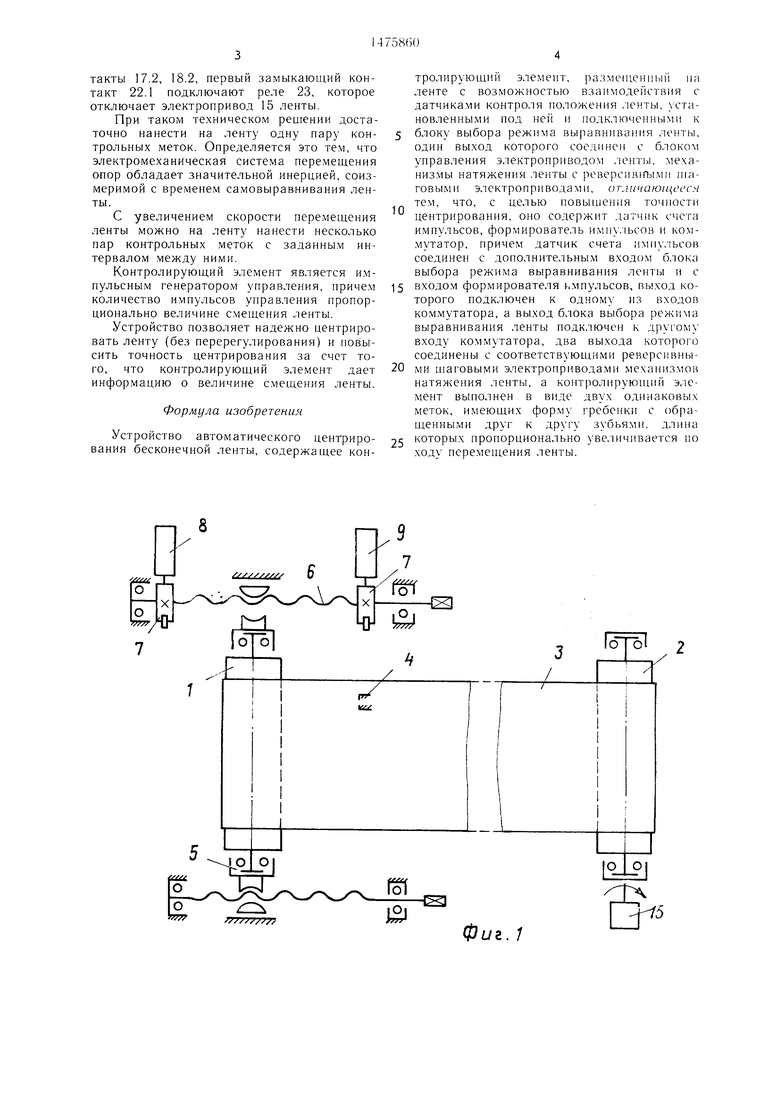
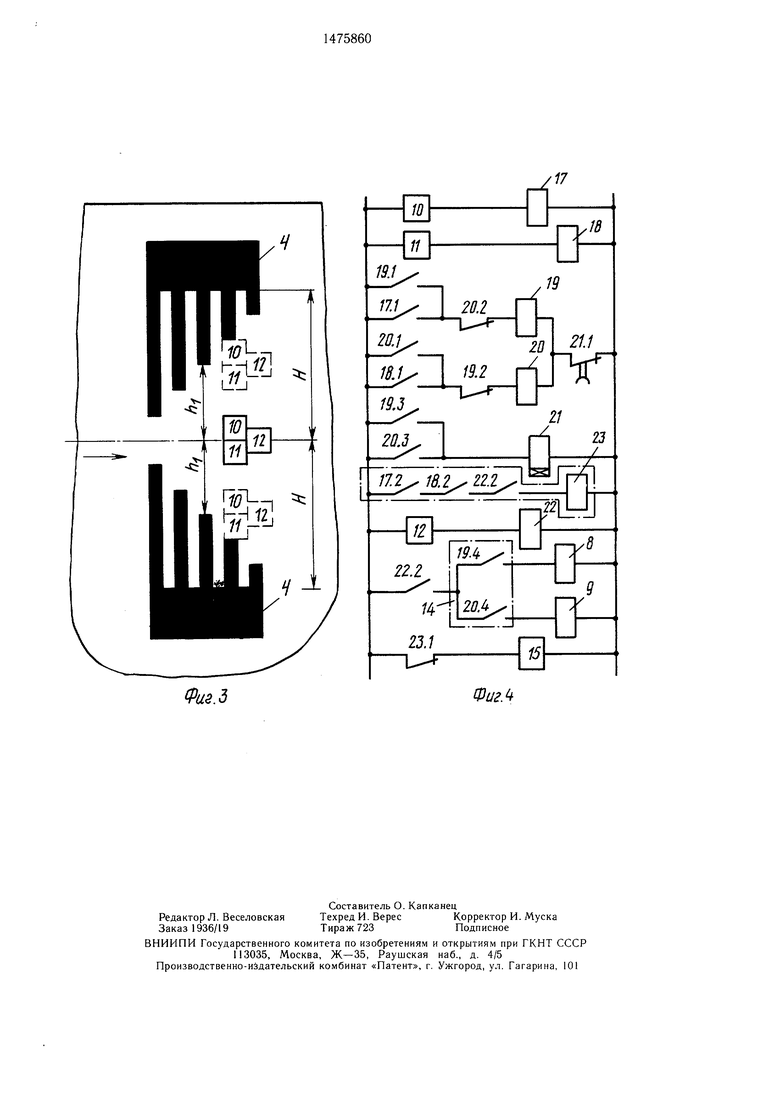
На фиг. 1 показано устройство центрирования бесконечной ленты, общий вид; на фиг. 2 - функциональная блок-схема устройства; на фиг. 3 - контролирующий элемент, общий вид; на фиг. 4 - принципиальная схема выбора режима выравнивания ленты.
Устройство автоматического центрирования бесконечной ленты содержит натяжной 1 и приводной 2 барабаны, на которых расположена бесконечная лента 3 с контролирующим элементом 4, опоры 5 с винтовым ручным механизмом 6 натяжения, реверсивный шаговый электропривод второй опоры натяжного барабана 1, содержащий храповые зубчатые механизмы 7 с наружным зацеплением, тяговые электромагниты 8 и 9, датчики 10 и 11 контроля положения ленты 3, датчика 12 счета импульсов.
Датчики 10, 11 и 12 подключены к блоку 13 выбора режима выравнивания ленты, один выход которого через коммутатор 14 подключен к тяговым электромагнитам 8 и 9, а другой - к блоку 15 управления электроприводом ленты, датчик 12 подключен также к формирователю 16 импульсов, выход которого подключен к коммутатору 14.
Блоки функциональной схемы (фиг. 2) реализованы на релейно-контактной аппаратуре (фиг. 4). Датчики 10 и 11 подключены к обмоткам входных реле 17 и 18. Их первые замыкающие контакты 17.1 и 18.1, параллельно которым подсоединены первые замыкающие контакты 19.1 и 20.1 выходных реле подключены к обмоткам выходных реле 19 и 20 через взаимно блокирующие контакты 20.2 и 19.2, другие концы обмоток объединены и подсоединены через размыкающий контакт 21.1 реле 21 времени тактового задатчика к источнику питания, вторые замыкающие контакты 19.3 и 20.3 выходных реле параллельно подсоединены к реле 21 времени тактового задатчика, а вторые замыкающие контакты 17.2 и 18.2 входных реле через первый замыкающий контакт 22.1 реле 22 блока формирования импульсов подсоединены к реле 23 элемента И, размыкающий контакт 23.1 которого подключен к блоку 15 управления электроприводом ленты, второй замыкающий контакт 22.2 реле 22 блока формирования импульсов подключен к коммутатору, включающему общую точку соединения третьих замыкающих контактов 19.4 и 20.4 выходных реле, другие концы которых подключены к соответствующим электромагнитам 8 и 9.
Устройство работает следующим образом.
Установка ленты в заданное положение производится без нагрузки вручную перемещением опор 5 винтовыми механизмами 6, а затем устройство переводится в автоматический режим.
В работе устройства могут иметь место три ситуации: лента находится в цен- тральном положении; смещение ленты от центрального положения на величину, не превышающую Н, вверх или вниз, смещение ленты от центрального положения на величину, превышающую Н.
Работа устройства без смещения ленты от центрального положения.
Датчики 10 и 11 контроля положения ленты и датчик 12 счета импульсов не выдают сигналы на обмотки входных реле 17 и 18 и реле 22 блока формирования им- Q пульсов, и блок выбора режима выравнивания ленты не включается в работу.
Если через определенный промежуток времени вследствие комплексного воздействия возмущающих факторов на ленту она смещается от центрального положения то при 5 смещении ее на величину hi, а вместе с ней и контролирующего элемента, например, вверх срабатывает датчик 10, который выдает сигнал на обмотку входного реле 17.
Сигнал через первые размыкающие контакты 17.1 входного реле первого канала 0 регулирования, размыкающие контакты 20.2 входного реле второго канала регулирования поступает на выходное реле 19, обеспечивая самоподпитку.
Второй замыкающий контакт 19.3 выходного реле подает сигнал на реле 21 вре- 5 мени тактового задатчика, который через заданный период времени прерывает сигнал от обмотки выходного реле 19.
При дальнейшем смещении ленты на величину Н срабатывают датчики 10-12. 0 С выхода датчика 12 сигнал поступает на обмотку реле 22 блока формирования импульсов и через второй замыкающий контакт 22.2, третий замыкающий контакт 19.4 выходного реле включает электромагнит 8, который через храповой механизм 7 пере- 5 мещает опору влево, и лента возвращается в начальное положение.
При перемещении ленты вниз срабатывают датчики 11 и 12 и сигнал проходит по второму каналу регулирования
Q так же, как и по первому, что приводит к смещению опоры вправо.
При возникновении режима интенсивного сползания ленты на величину, превышающую Н, за счет комплексного воздействия возмущающих факторов срабаты5 вают одновременно все датчики 10, 11 и 12, сигналы поступают на обмотки входных реле 17, 18 и реле 22 блока формирования импульсов, вторые замыкающие контакты 17.2, 18.2, первый замыкающий контакт 22.1 подключают реле 23, которое отключает электропривод 15 ленты.
При таком техническом решении достаточно нанести на ленту одну пару контрольных меток. Определяется это тем, что электромеханическая система перемещения опор обладает значительной инерцией, соизмеримой с временем самовыравнивания ленты.
С увеличением скорости перемещения ленты можно на ленту нанести несколько пар контрольных меток с заданным интервалом между ними.
Контролирующий элемент является импульсным генератором управления, причем количество импульсов управления пропорционально величине смещения ленты.
Устройство позволяет надежно центрировать ленту (без перерегулирования) и повысить точность центрирования за счет того, что контролирующий элемент дает информацию о величине смещения ленты.
Формула изобретения
Устройство автоматического центрирования бесконечной ленты, содержащее кон//y/W/y/V
5
0
5
тренирующий элемент, размещенный на ленте с возможностью взаимодействия с датчиками контроля положения ленты, cra- новленными под ней и подключенными к блоку выбора режима выравнивания ленты, один выход которого соединен с блоком управления электроприводом ленгы. механизмы натяжения ленты с реверсивными шаговыми электроприводами, отличающееся тем, что, с целью повышения точности центрирования, оно содержит датчик счета импульсов, формирователь импчльсов и коммутатор, причем датчик счета импульсов соединен с дополнительным входом блока выбора режима выравнивания ленты и с входом формирователя импульсов, выход которого подключен к одному из входов коммутатора, а выход блока выбора режима выравнивания ленты подключен к другому входу коммутатора, два выхода которого соединены с соответствующими реверсивными шаговыми электроприводами механизмов натяжения ленты, а контролирующий элемент выполнен в виде двух одинаковых меток, имеющих форму гребенки с обращенными друг к друг зубьями, длина которых пропорционально увеличивается по ходу перемещения ленты.
5T6I
/
00 2
о | о
1
Фиг. 1
Н5
Физ.З
Фиг А
| Устройство для автоматического центрирования движущейся бесконечной ленты | 1986 |
|
SU1313768A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для автоматического центрирования бесконечной ленты | 1986 |
|
SU1384486A1 |
