00
00 с 4
00
О5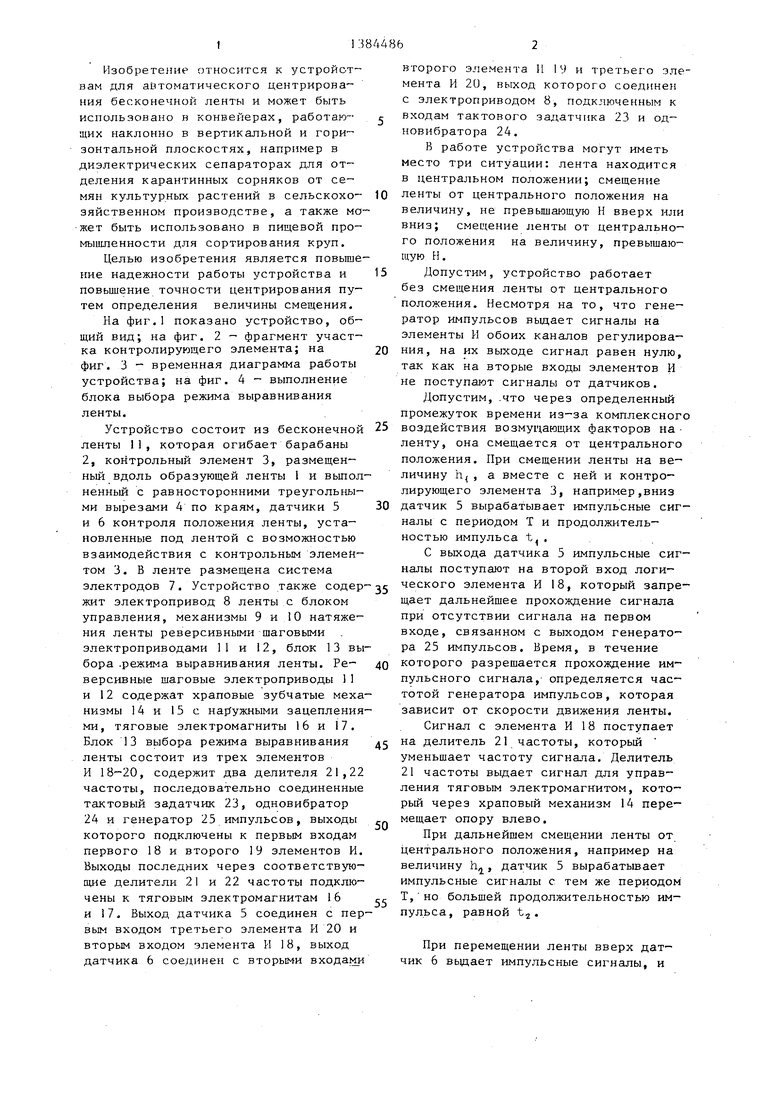
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического центрирования бесконечной ленты | 1987 |
|
SU1475860A1 |
| Устройство для автоматического центрирования движущейся бесконечной ленты | 1986 |
|
SU1313768A1 |
| Диэлектрический сепаратор | 1984 |
|
SU1238798A1 |
| Электрогидравлический следящий привод | 1985 |
|
SU1269092A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Устройство для контроля и регулирования производительности | 1990 |
|
SU1791032A1 |
| Устройство для автоматического центрирования бесконечной ленты | 1985 |
|
SU1252575A1 |
| Система программного управления электроприводом | 1987 |
|
SU1481708A1 |
| Устройство для автоматической центрировки линз | 1982 |
|
SU1118882A1 |
| Устройство для управления двухдвигательным тяговым приводом постоянного тока транспортного средства | 1985 |
|
SU1294657A1 |
Изобретение относится к технике конвейеров. Цель изобретения - повышение надежности работы и повышение точности центрирования путем определения величины смещения. Для этого в устр-ве контролирующий элемент вьшалнен с равносторонними треугольными вырезами по краям, а блок 13 выбора режима выравнивания ленты выполнен в виде трех элементов И 18-20, двух делителей 21,22 частоты и последовательно соединенных тактового за- датчика 23, генератора 25 импульсов, одновибратора 24. При смешении ленты от центрального положения, а вместе с ней и элемента с выхода датчиков 5 или 6 на элемент И 18 поступает -:игнал., который запреп1ает дальнейшее прохождение сигнала при отсутствии сигнала на его первом входе, связанном с выходом генератора 25. Время, в течение которого разрешается прохождение импульсного сигнала,определяется частотой генератора 25,которая зависит от скорости движения ленты 1, При использовании устр-ва экономится время на наладочные работы по центрированию ленты и увеличивается срок ее службы. 4 ил. с € (Л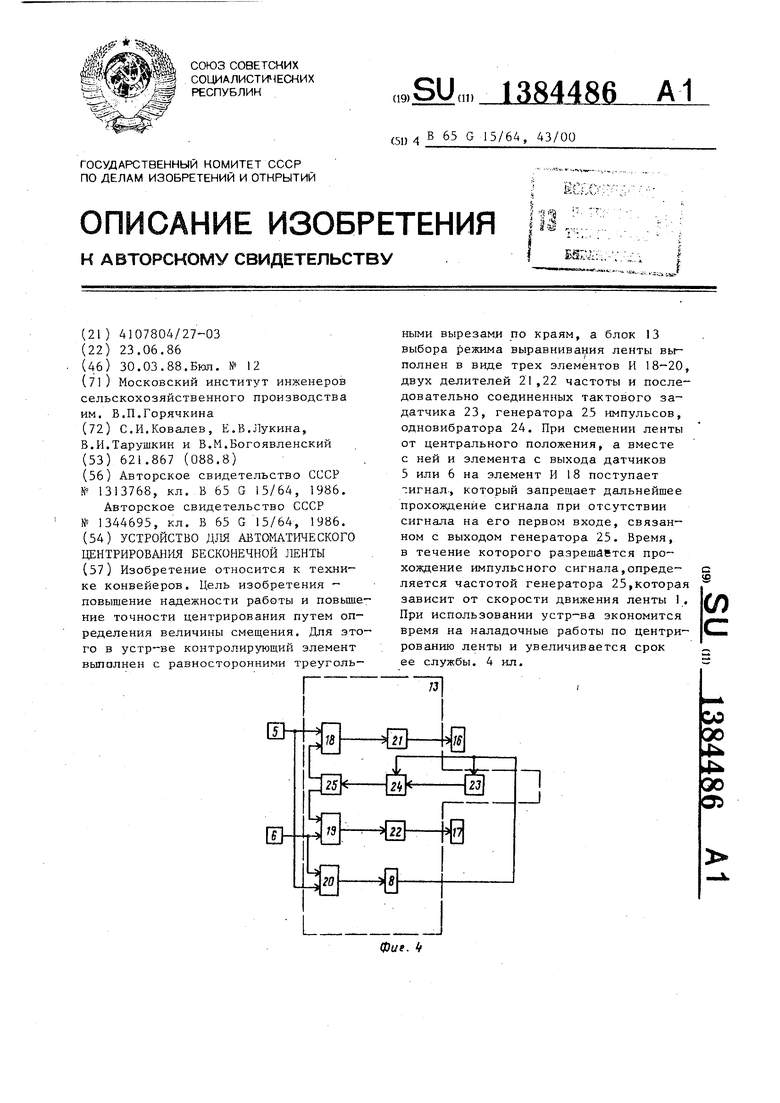
Фие. 4
Изобретение отиоснтся к устройот- нам для автоматического центрирования бесконечной ленты и может быть использонано в конвейерах, работаю- щих наклонно в вертикальной и горизонтальной плоскостях, например в диэлектрических сепараторах для отделения карантинных сорняков от семян культурных растений в сельскохо- зяйственном производстве, а также мажет быть использовано в пищевой промышленности для сортирования круп.
Целью изобретения является повышение надежности работы устройства и повьшение точности центрирования путем определения величины смещения.
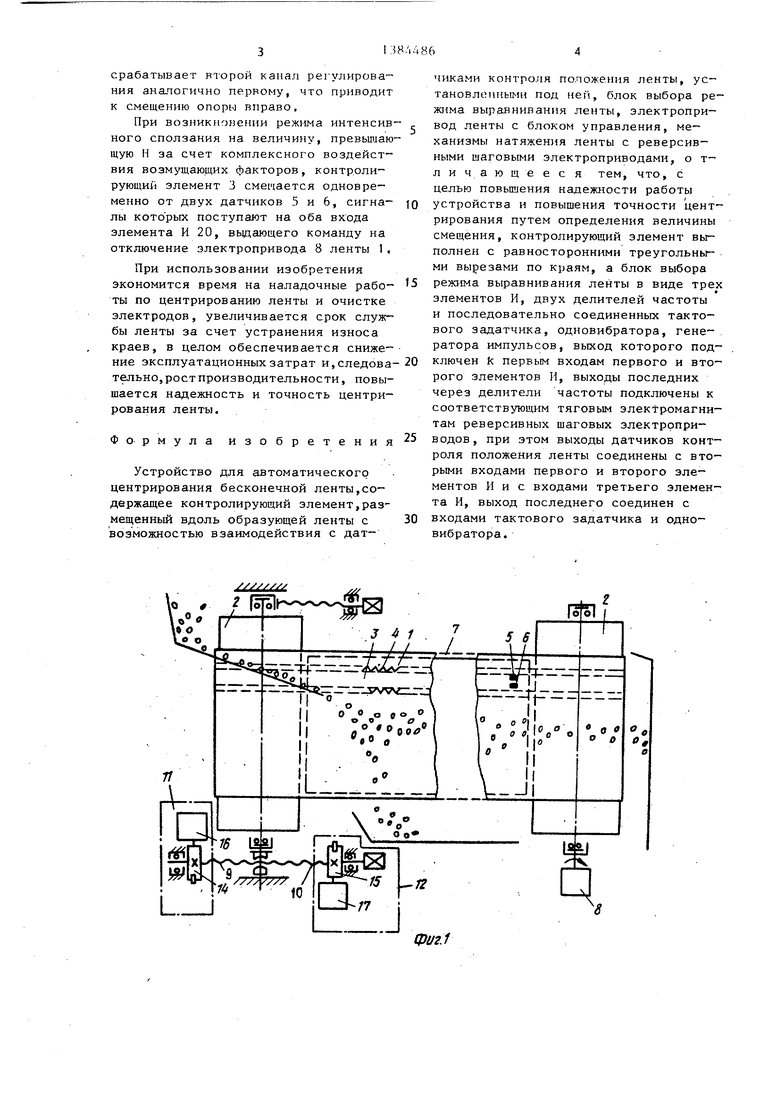
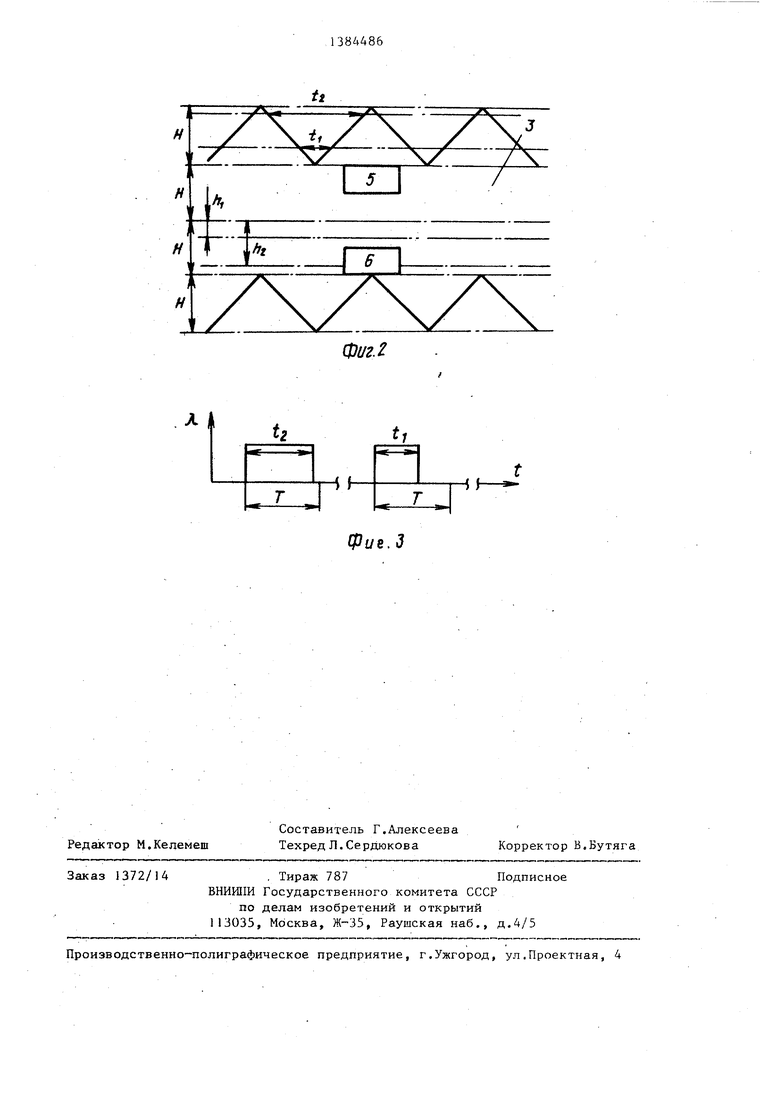
На фиг,1 показано устройство, общий вид; на фиг. 2 - фрагмент участка контролирующего элемента; на фиг. 3 - временная диаграмма работы устройства; на фиг. 4 - выполнение блока выбора режима выравнивания ленты.
Устройство состоит из бесконечной ленты 11, которая огибает барабаны 2, контрольный элемент 3, размещенный вдоль образующей ленты 1 и выполненный с равносторонними треугольными вырезами 4 по краям, датчики 5 и 6 контроля положения ленты, установленные под лентой с возможностью взаимодействия с контрольным элементом 3. В ленте размещена система электродов 7. Устройство также содер жит электропривод 8 ленты с блоком управления, механизмы 9 и 10 натяжения ленты реверсивными шаговыми электроприводами 11 и 12, блок 13 выбора .режима выравнивания ленты. Ре- версивные шаговые электроприводы 11 и 12 содержат храповые зубчатые механизмы 14 и 15 с нарГужными зацеплениями, тяговые электромагниты 16 и 17. Блок 13 выбора режима выравнивания ленты состоит из трех элементов И 18-20, содержит два делителя 21,22 частоты, последовательно соединенные тактовый задатчик 23, одновибратор 24 и генератор 25 импульсов, выходы которого подключены к первым входам первого 18 и второго 19 элементов И. Выходы последних через соответствую- дие делители 21 и 22 частоты подключены к тяговым электромагнитам 16 и 17. Выход датчика 5 соединен с первым входом третьего элемента И 20 и вторым входом элемента И 18, выход датчика 6 соединен с вторыми входами
второго элемента И 1У и третьего элмента И 2Q, выход которого соединен с электроприводом 8, подключенным к входам тактового задатчика 23 и од- новибратора 24.
В работе ycTpoficTBa могут иметь место три ситуации: лента находится в центральном положении; смещение ленты от центрального положения на величину, не превышающую Н вверх или вниз; смещение ленты от центрального положения на величину, превышающую Н.
Допустим, устройство работает без смещения ленты от центрального положения. Несмотря на то, что генератор импульсов выдает сигналы на элементы И обоих каналов регулирования, на их выходе сигнал равен нулю так как на вторые входы элементов И не поступают сигналы от датчиков.
Допустим, .что через определенный промежуток времени из-за комплексног воздействия возмущающих факторов на ленту, она смещается от центрального положения. При смещении ленты на величину h , а вместе с ней и контролирующего элемента 3, например,вниз датчик 5 вырабатывает импульсные сигналы с периодом Т и продолжительностью импульса t .
С вькода датчика 5 импульсные сигналы поступают на второй вход логического элемента И 18, который запрещает дальнейшее прохождение сигнала при отсутствии сигнала на первом входе, связанном с выходом генератора 25 импульсов. Время, в течение которого разрешается прохождение импульсного сигнала,- определяется частотой генератора импульсов, которая зависит от скорости движения ленты.
Сигнал с элемента И 18 поступает на делитель 21 частоты, который уменьшает частоту сигнала. Делитель 21 частоты вьщает сигнал для управления тяговым электромагнитом, который через храповый механизм 14 перемещает опору влево.
При дальнейшем смещении ленты от центрального положения, например на величину h, датчик 5 вырабатьшает импульсные сигналы с тем же периодом Т, но большей продолжительностью импульса, равной tj.
При перемещении ленты вверх датчик 6 выдает импульсные сигналы, и
срабатывает второй канал регулирования аналогично первому, что приводит к смещению опоры вправо.
При возникновении режима интенсив него сползания на величину, превышающую И за счет комплексного воздействия возмущающих факторов, контролирующий элемент 3 сме | ается одновременно от двух датчиков 5 и 6, сигна- лы которых поступают на оба входа элемента И 20, вьщающего команду на отключение электропривода 8 ленты 1.
При использовании изобретения экономится время на наладочные рабо- ты по центрированию ленты и очистке электродов, увеличивается срок службы ленты за счет устранения износа краев, в целом обеспечивается снижение эксплуатационных затрат и,следова тельно,рост производительности, повышается надежность и точность центрирования ленты.
Формула изобретения
Устройство для автоматического центрирования бесконечной ленты,содержащее контролирующий элемент,размещенный вдоль образующей ленты с возможностью взаимодействия с датХ/УХХ/уУ
.
/ f
г I.3 j 1 . J5
чиками контроля положе П1Я ленты, установленными под Het(, блок выбора режима выравнивания ленты, электропривод ленты с блоком управления, механизмы натяжения ленты с реверсивными шаговыми электроприводами, о т- ли чающееся тем, что, с целью повышения надежности работы устройства и повышения точности центрирования путем определения величины смещения, контролирующий элемент выполнен с равносторонними треугольными вырезами по краям, а блок выбора режима выравнивания ленты в виде трех элементов И, двух делителей частоты и последовательно соединенных тактового задатчика, одновибратора, генератора импульсов, вьсход которого подключен k первым входам первого и второго элементов И, выходы последних через делители частоты подключены к соответствующим тяговым электромагнитам реверсивных щаговых электроприводов, при этом выходы датчиков контроля положения ленты соединены с вторыми входами первого и второго элементов И и с входами третьего элемента И, выход последнего соединен с входами тактового задатчика и одно- вибратора.
8
Фи2.1
Фиг.
Фие.З
| Устройство для автоматического центрирования движущейся бесконечной ленты | 1986 |
|
SU1313768A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Авторское свидетельство СССР № 1344695, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
