технологические операции: зажим и освобождение подложкодержателя 13 губками 43 захвата 5, перенос подложкодержателя 13 вдоль оси корпуса 1, в обслуживаемом объекте 53 в направлениях вперед и назад. Для зажима изделия -электропривод 16 перемещает средний ролик 15 в крайнее заднее положение и отводит его от тросика 17, Пружина 30, сжатая цилиндри1
Изобретение относится к устройствам вакуумной техники и может применяться для автоматизации процессов переноса подложкодержателей с подложками и других деталей различной конфигурации в вакуумных установках, например, для переноса подложкодержателей из одной вакуумной камеры в другую в специальном технологическом оборудовании, применяемом в вакуум- ной промьшленности.
Целью изобретени1я является расширение функциональных возможностей за счет манипулирования изделий с
разным пространственным положением.
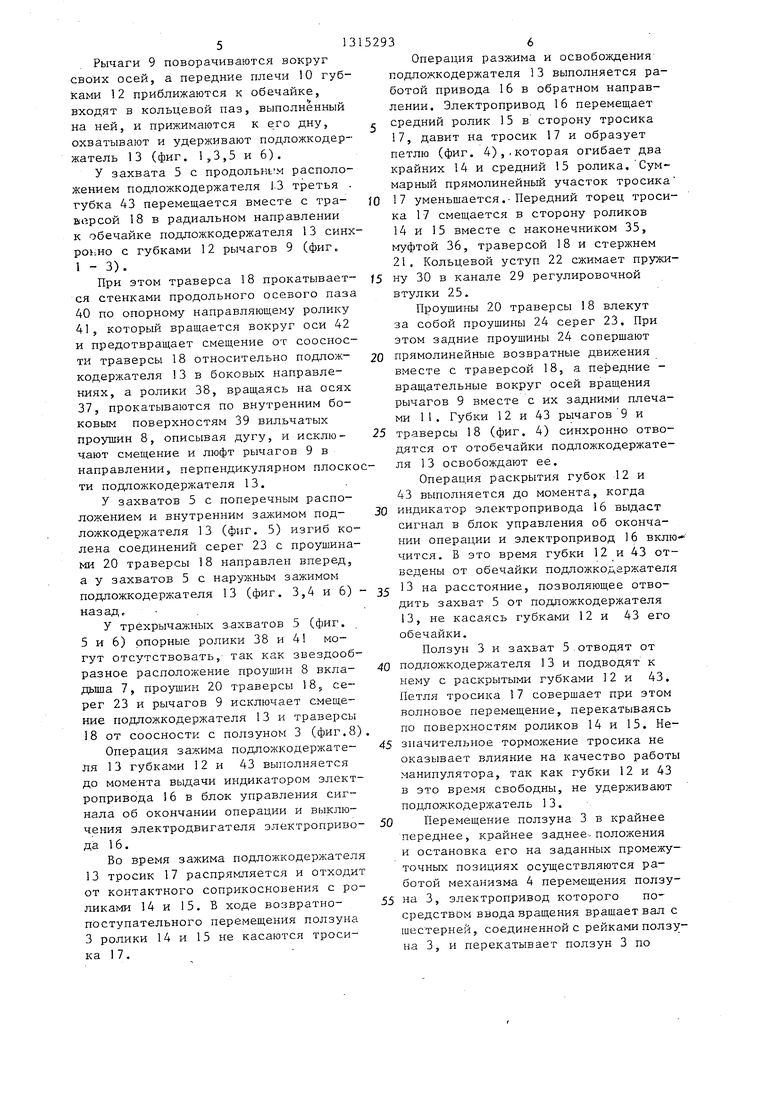
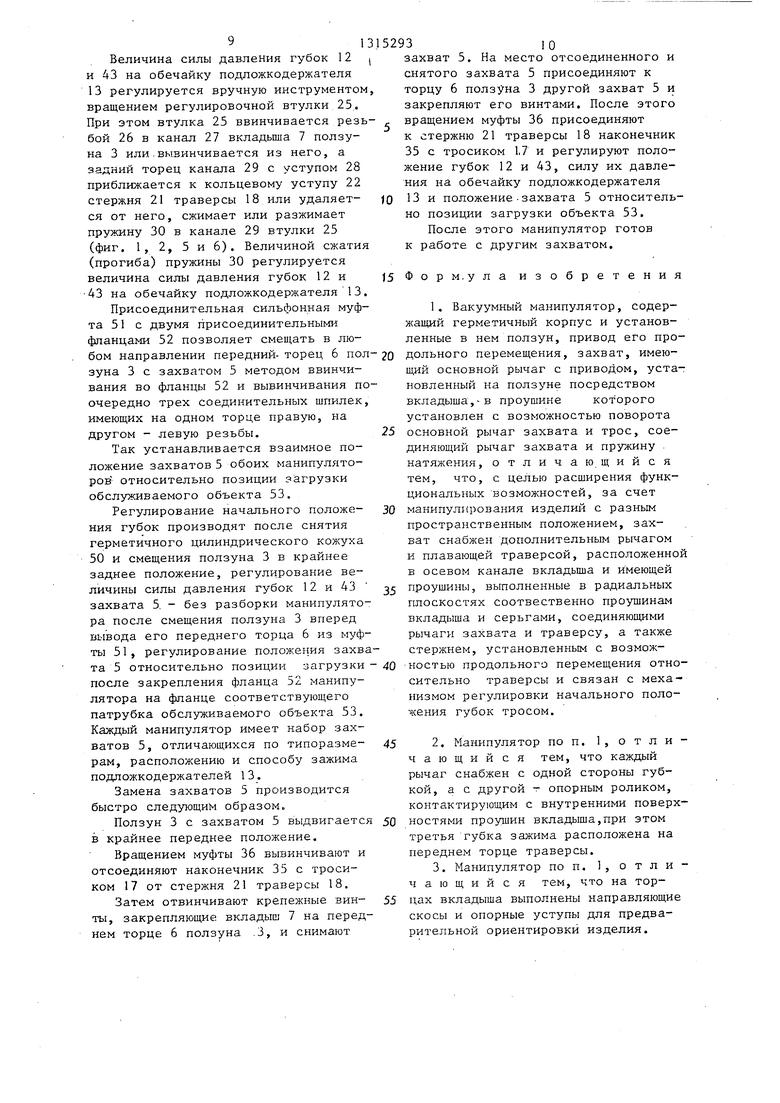
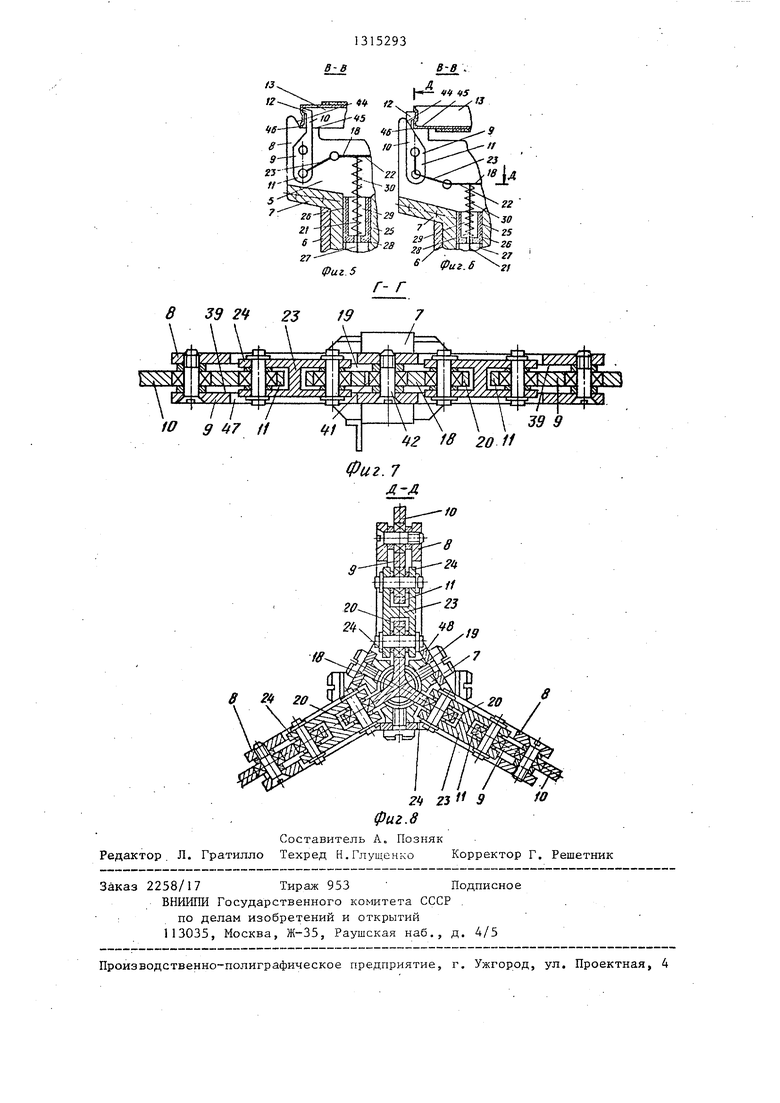
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2 (захват с продольным расположением подложкодержателя); на фиг. 4 - разрез Б-Б на фиг. 2 (схема работы захвата с продольным расположением подложкодержателя); на фиг. 5 - разрез В-В на фиг. 3 (захват с поперечным расположением подложкодержателя и внутренним расположением губок); на фиг. 6 - разрез В-В на фиг. 3 (захват с поперечным расположением подложкодержателя и наружным расположением губок); на фиг. 7 - разрез Г-Г на фиг. 4; на фиг. 8 - разрез Д-Д на фиг. 6.
Манипулятор .содержит герметичный корпус 1 и установленные в нем на вращательно подвижных роликах 2 пол зун .3, кинематически связанный с механизмом 4 продольного перемещения, захват 5, установленный на переднем торце 6 ползуна 3 посредством вкладыша 7, в вильчатых проушинах 8 ко-
ческим уступом 28 в канале 29 регулировочной втулки 25 и кольцевым уступом 22 стержня 21 траверсы 18, давит на уступ 22 и смещает траверсу вперед. Задние плечи рычагов под действием подвижных соединений с вильчатыми проушинами серег раздвигаются в стороны и сводятся в напралении оси траверсы 18. 2 з.п. ф-лы, 8 ил.
торого закреплены вращательно подвижные рычаги 9, имеющие передние 10 и задние 11 плечи, на торцах передних плеч 10 рычагов 9 выполнены губки 12, зажимающие подложкодержатель 13, привод 5 захвата, включающий два крайних ролика 14, один средний ролик 15 с электроприводом 16 возвратно-поступательного перемещения его и тросик 1.7, контактирующий с роликами 14 и 15 (фиг. 1-4).
Захват 5 снабжен плавающей траверсой 18, которая расположена в осевом канале 19 вкладьша 7 и имеет на боковых поверхностях проущины 20, выполненные в радиальных плоскостях с соответствующими проушанами 8 вкла- дьшт 7, и на заднем торце - стержень 21р имеющий кольцевой уступ 22; серьгами 23 с вильчатьши проушинами 24 на торцах, посредством которых задние плечи 11 рычагов 9 соединены вращательно подвижно с соответствующими проушинами 20 траверсы 18. Кроме того, захват 5 снабжен регулировочной втулкой 25, имеющий наружную винтовую резьбу 26, посредством которой она соединена с резьбовым осевым каналом 27, выполненным во вкладьппе 7, и цилиндрический уступ 28 на заднем торце канала 29, в котором установлена пружина 30, упирающаяся одним торцом в уступ 22 траверсы 18, другим - в уступ 28 канала 29 регулировочной втулки 25 (фиг.1 - 6).
Задний торец тросика 17 закреплен в осевом канале 31 стержня 32, соединенного с регулирующей втулкой 33 осевого смещения тросика 17, располо.3 1
женной в заднем осевом канале 34 ползуна 3 и взаимодействующей посредством винтовой резьбы с наружной поверхностью стержня 32, а передний торец тросика 17 соединен с осевым стержнем 21 траверсы -18 посредством наконечника 35 и муфты 36 с винтовой резьбой (фиг. 1 и 2).
У захвата 5 с продольным расположением подложкодержателя 13 (фиг.З и 4), на торце заднего плеча 1 каждого рычага 9 закреплен на радиально расположенной оси 37 вращательно подвижный опорный ролик 38, контактирующий с внутренними боковыми -поверхностями 39 вильчатой проушины В вкладыша 7 захвата 5 (фиг. 3,4 и 7).
В траверсе 18 выполнен продоль- ньш осевой паз 40, контактирующий своими стенками с опорным направляющим роликом 41, закрепленным на оси 42 в канале вкладьш а 7 захвата 5 (фиг. 3,4 и 7).
Третья губка 43 зажима подложкодержателя 13 выполнена на переднем торце траверсы 18 (фиг. 1-4).
У захвата 5 с поперечным расположением подложкодержателя 13 на торцах вильчатых проушин 8 вкладыша 7 выполнены направляющие скосы 44 и опорные уступы 45, взаимодействую- с кольцевыми скосами 46 подложкодержателя 13 (фиг. 5 и 6).
У захвата 5 с продольным положением подложкодержателя 13 вильчатые проушины 8 и передняя часть канала 19 образованы двумя параллельными пластинчатыми 47 (фиг. 7), а у захвата 5 с поперечным положением подложкодержателя 13 - тремя V-образными щеками 48, прикрепленными винтами и штифтами к боковым пластинчатым выступам 49 вкладьша 7 (фиг. 8).
На заднем торце корпуса 1 закреплен герметичный цилиндрический кожух 50, в котором расположена задняя часть ползуна 3, на переднем - присоединительная сильфонная муфта 51 с присоединительным фланцем 52, посредством которого манитулятор присоединен . к фланцу обслуживаемого объекта 53, например корпуса перегрузочного устройства (фиг. 1 и 2).
Направляющие опорные ролики 38 и 41 расположены между внутренними
34
боковыми поверхностями 39 направляю- mjix стенок вильчатых проушин 8 вкла- дьш1а 7 и продольного осевого паза 40 траверсы 18, обкатываемых ими,
с минимальным зазором, при котором ролики касаются только одной и не могут касаться одновременно двух опорных боковых поверхностей 39. Манипулятор работает следующим
образом.
Электропривод механизма 4 продольного возвратно-поступательного перемещения ползуна 3 и электропривод 16 привода захвата 5 имеют
электрическую связь посредством блог ка управления с электронно-вычислительной машиной гибкого автоматического производства (ЭВМ ГАП, не показаны).
Все команды включения и выключения этих электроприводов выполняются по заданной в ЭВМ программе в соответствии с требованиями технологического процесса.
Информацию о выполнении заданных команд выдают электрические индикаторы этих электроприводов (не показаны) .
Манипулятор выполняет технологические операции: зажим и освобождение подложкодержателя 13 губками 12 и 43 захвата 5, перенос подложкодержателя 13 вдоль оси корпуса 1, в обслуживаемом объекте 53 в направлениях вперед и назад.
Операцию зажима подложкодержа- теля 13 захват 5 выполняет следующим образом. Электропривод 16 перемещает средний ролик 15 в крайнее заднее
положение и отводит его от тросика
17(фиг. 2-4).
Пружина 30, сжатая между цилиндрическим уступом 28 в канале 29 регулировочной втулки 25 и кольцевым уступом 22 стержня 21 траверсы 18, давит на уступ 22 и смещает траверсу
18вперед (фиг. 1-6).
Задние плечи 11 рычагов 9 под действием подвижных соединений с пильчатыми проушинами 24 серег 23 (фиг. 7 и 8) раздвигаются в стороны у захватов 5, зажимающих подложкодержа- тель 13 по наружной поверхности чайки (фиг. 1,2,3 и 6) и сводятся в
направлении оси траверсы 18 у захватов 5, зажимающих подложкодержатель 13 по внутренней поверхности обечайки (фиг. 5).
Рычаги 9 поворачиваются вокруг своих осей, а передние плечи 10 губками 12 приближаются к обечайке, входят в кольцевой паз, выполненный на ней, и прижимаются к его дну, охватывают и удерживают подложкодер- жатель 13 (фиг. 1,3,5 и 6).
У захвата 5 с продольнь м расположением подложкодержателя 1-3 третья . губка 43 перемещается вместе с тра- 18 в радиальном направлении к обечайке подложкодержателя 13 синх poiiHo с губками 12 рычагов 9 (фиг„ 1-3).
При этом траверса 18 прокатывает- ся стенками продольного осевого паза 40 по опорному направляющему ролику 41, который вращается вокруг оси 42 и предотвращает смещение от соосности траверсы 18 относительно подлож- кодержателя 13 в боковых направлениях, а ролики 38, вращаясь на осях 37, прокатываются по внутренним боковым поверхностям 39 вильчатых проушин 8, описывая дугу, и исклю- чают смещение и люфт рычагов 9 в направлении, перпендикулярном плоскоти подложкодержателя 13.
У захватов 5 с поперечным расположением и внутренним зажимом под- ложкодержателя 13 (фиг. 5) изгиб колена соединений серег 23 с проушинами 20 траверсы 18 направлен вперед, а у захватов 5 с наружным зажимом подложкодержателя 13 (фиг. 3,4 и 6) назад,
У трёхрычажных захватов 5 (фиг. 5 и 6) опорные ролики 38 и 41 могут отсутствовать, так как звездообразное расположение проушин 8 вкла- дьша 7, проушин 20 траверсы 18, серег 23 и рычагов 9 исключает смещение подложкодержателя 13 и траверсы 18 от соосности с ползуном 3 (фиг.8)
Операция зажима подложкодержате- ля 13 губками 12 и 43 выполняется до момента выдачи индикатором электропривода 16 в блок управления сигнала об окончании операции и выключения электродвигателя электроприво- да 16.
Во время зажима подложкодержателя 13 тросик 17 распрямляется и отходит от контактного соприкосновения с роликами 14 и 15, В ходе возвратно- поступательного перемещения ползуна 3 ролики 14 и 15 не касаются тросика 1 7 .
Операция разжима и освобождения подложкодаржателя 13 выполняется работой привода 16 в обратном направлении. Электропривод 16 перемещает средний ролик 15 в сторону тросика 17, давит на тросик 17 и образует петлю (фиг. 4),.которая огибает два крайних 14 и средний 15 ролика, Суммарный прямолинейньш участок тросика 17 уменьщается.-Передний торец тросика 17 смещается в сторону роликов 14 и 15 вместе с наконечником 35, муфтой 36, траверсой 18 и стержнем 21. Кольцевой уступ 22 сжимает пружину 30 в канале 29 регулировочной втулки 25.
Проущины 20 траверсы 18 влекут за собой проущины 24 серег 23. При этом задние проущины 24 соверщают прямолинейные возвратные движения вместе с траверсой 18, а передние - вращательные вокруг осей вращения рычагов 9 вместе с их задними плечами 11. Губки 12 и 43 рычагов 9 и траверсы 18 (фиг. 4) синхронно отводятся от отобечайки подложкодержателя 13 освобождают ее.
Операция раскрытия губок 12 и 43 выполняется до момента, когда индикатор эл€ ктропривода 16 выдаст сигнал в блок управления об окончании операции и электропривод 16 вклю чится, В это время губки 12 и 43 отведены от обечайки подложкодаржателя 13 на расстояние, позволяющее отводить захват 5 от подложкодержателя 13, не касаясь губками 12 и 43 его обечайки.
Ползун 3 и захват 5 отводят от подложкодержателя 13 и подводят к нему с раскрытыми губками 12 и 43. Петля тросика 17 совершает при этом волновое перемещение, перекатываясь по поверхностям роликов 14 и 15. Незначительное торможение тросика не оказывает влияние на качество работы манипулятора, так как губки 12 и 43 Б это время свободны, не удерживают подложкодержатель 13.
Перемещение ползуна 3 в крайнее пофеднее, крайнее заднее-положения и остановка его на заданных промежуточных позициях осуществляются работой механизма 4 перемещения ползуна 3, электропривод которого посредством ввода вращения вращает вал с шестерней, соединенной с рейками ползуна 3, и перекатывает ползун 3 по
.7131
порно.- направляюиц1м роликам . 2.0н ключается и выключается по командам лока управления.
В исходном положении захват 5 наодится в крайнем заднем положении, его губки 12 и 43 сжаты.
Операция передачи подложкодержа- еля 13 из захвата 5 с продольным асположением в захват 5 с поперечым расположением подложкодержателя 13 и обратно осуществляется следуюим образом.
Ползуны 3 и захваты 5 двух манипуляторов с продольным и поперечным расположением подложкодержателей 13, закрепленных на разных фланцах 52 одного и того же обслуживания объекта 53, находятся во взаимно перпендикулярных плоскостях относительно центра позиции перегрузки (фиг. 3 и 4) обслуживаемого объекта 53,
Причем подложкодержатель 13 с захватом 5 продольного расположения выводится на позицию перегрузки объекта 53 в положение, соосное с захватом 5 поперечного расположения подложкодержателя 13, а подложкодержатель 13 с захватом 5 поперечного расположения выводится в плоскость, соответствующую плоскости расположения рычагов 89 и губок 12 и .43 захвата 5 продольного расположения подложкодержателя (фиг. 3-6).
Один из захватов 5 выводится на позицию перегрузки объекта 53 с подлозккодержателем 13, зажатым губ- ками 12 и 43, другой - без подложкодержателя 13 с раскрытыми губками. Во время стыковки губок 12 и 43 двух захватов 5 положение подложкодержателя 13 устанавливает и определяет захват 5 с поперечным расположением подложкодержателя 13,
Он своими направляющими скосами 44 проушин 8 вкладыша 7, касаясь ко льцевых скосов 46 подложкодержателя 13, смещает его в радиальной плоскости до совмещения по соосности со своим захватом 5, а опорными уступами 45 смещает подложкодержатель 13 в осевом направлении до совпадения кольцевого паза его обечайки с плоскостью расположения губок 12 и 43 захвата 5 с продольным расположением подложкодержателя. При этом незначительно отклонения в положении подложкодержателя 13 на позиции перегрузки, возникшие в результате на-i личия люфтов механизмов обеих манипу38
ляторов или по другим причинам, выправляются.
Первым на позицию перегрузки вы- , водят захват 5 с зажатыми губками 12 и 43 подложкодержателем 13 и останавливают его, вторым выводят захват 5 без подложкодержателя с разжатыми губками 12 и 43; затем захват 5 с разжатыми губками 12 и 43 зажимает
подложкодержатель 13 губками 12 и 43, после чего подложкодержатель 13 зажат шестью губками 12 и 43 двух захватов 5 обоих манипуляторов (фиг. 3-6),
Затем захват 5, доставивший подложкодержатель 13 на позицию пере-, грузки, разжимает свои губки 12 и 43 под действием своего привода. Механизм 4 отводит его вместе с ползуном 3 в исходное положение.
Загруженный подложкодержателем 13 захват 5 со своим ползуном 3 переводится механизмоА 4 продольного перемещения ползуна на очередную технологическую позицию перегрузки, загрузки или технологической обработки подложки.
Так чередуются циклы перегрузки- и транспортировки подложкодержателей
13 с закрепленными на них подложками.
Манипулятор имеет несколько оригинальных элементов регулирования,
В заднем осевом канале 34 ползуна 3 регулирующая втулка 33 может
быть повернута инструментом в любом направлении по окружности. От осевого смещения ее удерживает внешний цилиндрический буртик (фиг, 1 и 2), При вращении втулки 33 в ее канал ввинчивается или из канала вывинчивается стержень 32 с тросиком 17, удерживаемый от вращения.
Стержень 32 с каналом 31 и тросиком 17 перемещается вдоль своей оси
под действием пружины 30 вперед или назад.
Вместе с тросиком 17 перемещаются наконечник 35, муфта 36, траверса 18, серьги 23 и рьшаги 9 с губками 12 и 43 (фиг. 1 и 2).
Так устанавливается, регулируется и поддерживается в процессе эксплуатации начальное положение губок 12 и 43 захвата 5.
Разрегулирование предотвращается стопорением втулки 33 в канале 34 от произвольного вращения стопорным винтом.
91
Величина силы давления губок 12 и 43 на обечайку подложкодержателя 13 регулируется вручную инструментом вращением регулировочной втулки 25. При этом втулка 25 ввинчивается резьбой 26 в канал 27 вкладыша 7 ползуна 3 или,вывинчивается из него, а задний торец канала 29 с уступом 28 приближается к кольцевому уступу 22 стержня 21 траверсы 18 или удаляется от него, сжимает или разжимает пружину 30 в канале 29 втулки 25 (фиг. 1, 2, 5 и 6). Величиной сжатия (прогиба) пружины 30 регулируется величина силы давления губок 12 и 43 на обечайку подложкодержателя 13.
Присоединительная сильфонная муфта 5 1 с двумя присоединительными фланцами 52 позволяет смещать в любом направлении передний- торец 6 ползуна 3 с захватом 5 методом ввинчивания во фланцы 52 и вывинчивания поочередно трех соединительных шпилек, имеющих на одном торце правую, на другом - левую резьбы.
Так устанавливается взаимное положение захватов 5 обоих манипуляторов относительно позиции загрузки обслуживаемого объекта 53.
Регулирование начального положения губок производят после снятия герметичного цилиндрического кожуха 50 и смещения ползуна 3 в крайнее заднее положение, регулирование величины силы давления губок 12 и 43 захвата 5. - без разборки манипулятора после смещения ползуна 3 вперед вывода его переднего торца 6 из муфты 51, регулирование положения захвата 5 относительно позиции загрузки после закрепления фланца 52 манипулятора на фланце соответствующего патрубка обслуживаемого объекта 53. Каждый манипулятор имеет набор захватов 5, отличающихся по типоразмерам, расположению и способу зажима подложкодержателей 13.
Замена захватов 5 производится быстро следующим образом.
Ползун 3 с захватом 5 выдвигается в крайнее переднее положение.
Вращением муфты 36 вывинчивают и отсоединяют наконечник 35 с тросиком 17 от стержня 21 траверсы 18.
Затем отвинчивают крепежные винты, закрепляющие вкладыш 7 на переднем торце 6 ползуна .3, и снимают
310
захват 5. На место отсоединенного и снятого захвата 5 присоединяют к торцу 6 ползуна 3 другой захват 5 и закрепляют его винтами. После этого вращением муфты 36 присоединяют к стержню 21 траверсы 18 наконечник 35 с тросиком 1,7 и регулируют положение губок 12 и 43, силу их давления на обечайку подложкодержателя
13 и положение.захвата 5 относительно позиции загрузки объекта 53.
После этого манипулятор готов к работе с другим захватом,
Ф о Р м.у ла изобретения
1. Вакуумный манипулятор, содержащий герметичный корпус и установленные в нем ползун, привод его продольного перемещения, захват, имею- шдй основной рычаг с приводом, установленный на ползуне посредством вкладыша,-в проушине кот орого установлен с возможностью поворота
основной рычаг захвата и трос, соединяющий рычаг захвата и пружину натяжения, отличающийся тем, что, с целью расширения функциональных возможностей, за счет
манипулирования изделий с разньм пространственным положением, захват снабжен дополнительным рычагом и плавающей траверсой, расположенной в осевом канале вкладыша и имеющей
проушины, выполненные в радиальных плоскостях соотвественно проушинам вкладыша и серьгами, соединяющими рычаги захвата и траверсу, а также стержнем, установленным с возможностью продольного перемещения относительно траверсы и связан с механизмом регулировки начального положения губок тросом.
2. Манипулятор по п. 1, отличаю щ и и с я тем, что каждый рычаг снабжен с одной стороны губкой, а с другой - опорным роликом, контактирующим с внутренними поверхкостями проушин вкладыша,при этом третья губка зажима расположена на переднем торце траверсы.
3. Манипулятор по п. 1, отличающийся тем, что на торцах вкладыша выполнены направляющие скосы и опорные уступы для предварительной ориентировки изделия.
33
Фи2.1
15
32
/«
Фиг.З
5-6
f3
B-S
Фиг.5
В-В V
24 23 f 9
фиг.8
Составитель Л. Позняк Редактор. Л. Гратилло Техред Н.Глущснко Корректор Г. Решетник
Заказ 2258/17 Тираж 953 Подписное
ВНИИГГИ Государственного комитета СССР . : по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4


| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство шиберного типа | 1985 |
|
SU1275176A1 |
| Односторонний вакуумный клапан шиберного типа | 1985 |
|
SU1275175A1 |
| Вакуумный перегрузчик | 1986 |
|
SU1321980A1 |
| Установка для молекулярно-лучевой эпитаксии | 1984 |
|
SU1231920A1 |
| Манипулятор | 1981 |
|
SU1050860A1 |
| НОЖНИЦЫ РУЧНЫЕ | 2009 |
|
RU2407615C2 |
| Вакуумный манипулятор | 1979 |
|
SU823117A1 |
| Загрузочное устройство шиберного типа | 1982 |
|
SU1060851A1 |
| Устройство для изготовления отводов | 1989 |
|
SU1682006A1 |
| Устройство для загрузки станков | 1978 |
|
SU1040713A1 |

Изобретение относится к устройствам вакуумной техники. Цель изобретения - расширение функциональных возможностей за счет манипулирования изделий с разным пространственным положением. Манипулятор выполняет ад. 12 Z7 ZS- St 7 2835- Ч № lv vWtf4 |WWWrt Ik-, 18 rt ffj -о п 52 29 -6 21 1 П -15 fi с (Л со ел ю со со 31 33 7 3 -50 -32 -3 3 (Риг.г
| Вакуумный манипулятор | 1979 |
|
SU823117A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Л-Л | |||
