(54) ВАКУУМНЫЙ МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный манипулятор | 1985 |
|
SU1315293A1 |
| Вакуумный манипулятор | 1990 |
|
SU1754442A1 |
| Установка для молекулярно-лучевой эпитаксии | 1984 |
|
SU1231920A1 |
| Вакуумный манипулятор | 1986 |
|
SU1404331A1 |
| Загрузочное устройство шиберного типа | 1985 |
|
SU1275176A1 |
| Вакуумный манипулятор | 1988 |
|
SU1668132A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Загрузочное устройство шиберного типа | 1982 |
|
SU1060851A1 |
| Манипулятор | 1981 |
|
SU1050860A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕМЕЩЕНИЯ И ОРИЕНТИРОВАННОЙ УСТАНОВКИ ЕМКОСТЕЙ И ЕМКОСТЬ ДЛЯ ПЕРЕМЕЩЕНИЯ И ХРАНЕНИЯ | 2008 |
|
RU2379175C2 |
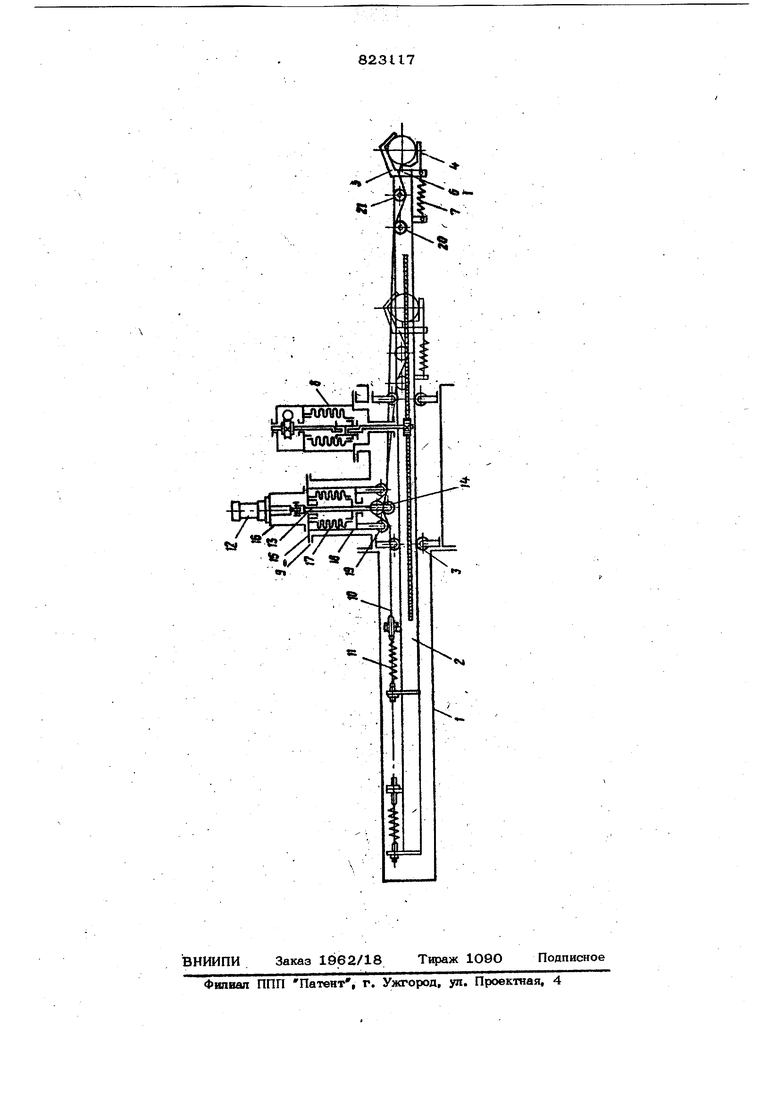
Иаобрегение относится к устройствам вакуумной техники и может применяться для автчэматизашш процессов переноса образцов в вакуумных установках, например, для переноса образцов из одной вакуумной камеры в другую в установках электронной и ионной спектроскопии, в установках молекулярно-лучевой эпитаксии. Известен вакуумный манипулятор, содержащий герметичный корпус и установленные в нем ползун, кинемат1р{ески свя-. занный с механизмомПродольного переме щения, привод захвата и систему управления захватом с тросиком 1. Недостатки известного устройства сложность конструкции и низкая надежность, связанные с тем, что управление захватом имеет много элементов, составляющих длиннукг цепь передачи движения от привода к захвату. Кроме того, большая длина и способ натяжения тросика усложняют сборку манипулятора. Цель изобретения - упрощение конструкции и повышение надежности манипулятора. Для достижения поставленной цели тро сик одним концом соединен с захватчзм, другим концом - с ползуном и кинематически связан с приводом захвата. Кроме того, манипулятор снабжен по меньшей мере тремя шарнирно связанны.ми с приводом захвата роликами, причем, по меньшей мере один ролик установлен с возможностью перемещения в направлении, перпендикулярном направлению перем цения ползуна. На чертеже показан вакуумный манипулятор, общий вид. Манипулягор состоит из герметичного корпуса I, ползуна 2, расположенного в kopnyce на направляющих 3 качения, захвата 4, губки 5 захвата, расположенной на оси 6, пружины 7, механизма 8 продольного перемещения, привода 9 захвата, тросика 10 и пружины II натяжения. 5 Привод захвата представляет собой пкевмооипвидр 12, соединенвый со штоком 13, на котором шаряирно установяе ролик 14. Пневмоштвндр 12 уставовлев на фпаыпэ 15 с помошью кронштейва 16 Флавеп 15 герметичво стыкуется с корпусом 1. Герметичность штока 13 при его перемешевив в вакууме от цшшварв .осуществляется за счет снльфова 17. На внутрэвней сторове фпавца 15 установлев веподвижво кровштейв 18 с. с роликами 19. Для натяжения fpocviка Ю ва ползуве 2 расположевы ролики 20 и 21. Мавипулятор работает следующим образом. Для установки образца в зажим ма випулятора двевмопиливдр 12 перемешае шток 13 в верхнее крайнее положение, что Приводит к перемешевию средвего ролика 14 относительно роликов 19. Это перемещение удлиняет часть тросика, находящуюся в приводе (между роликами 19), что вызывает поворот губки 5 и открытие захвата. После уставовки образца в захват за счет срабатывания пвевмошшивдра 12 проя однтся перемещение ролика 14 в внжвее крайвее положевие , что освобождает губку 5 и она под действи « прзга|ры поворачиваетс,я на оси 6 и зажимает . Пружива 11 об.еспечивает натяжевле тросика 10. .Перемещение ползуна вперед и назад осуществляется за счет 74 механизма продольного перемещения 8 с помощью реечной передачи. Управление зажимом может быть осуществлено в любом положении ползуна If во время его перемещения. и 3 о б р е т е н и о р м У Л а 1.Вакуумный манипулятор содержащий герметичный корпус и установленные в нем .ползун, кинематически связанный с механизмом продольного перемещения, привод захвата и сис-i тему управления захватом с тросиком, о т л и ч а ю щ и и с я т&л, что, с целью упрощения конструкции и повышения надежности, тросик одним ковиом соединен с захватом, другим концом - с ползуном, а также кинематически связан с приводом захвата. 2.Манипулятор по п. -1, о т л и ч а ю щ и и с я тем, что он снабжен по меньшей мере тремя шарнирно связанными с приводом захвата роликами, причем, по меньшей мере один ролик установлен с возможностью перемещения в направлении, перпендикулярном направлению перемещения ползуна. Источники информации, принятьте во внимание при экспертизе .1. Проектирование и изготовление механизма манипулятора для замены в вакуумной камере. Отчет п.о НИР, ВНТИ, инв. № Б475278, 1978.
