2.Манипулятор по п. 1, отличающийся тем, что пластины выполнены сменными, а пазы на них имеют различные углы наклона.
3.Манипулятор по п. 1, отличающийся тем,что, с целью кратковременного отключения вращения захвата, стойка снабжена
клином, кинематически связанным с фрикционной передачей.
4. Манипулятор по п. 1, отличающийся тем, что, с целью улучшения эксплуатационных возможностей, штанга выполнена полой, а ее внутренняя полость герметично связана с приводом разведения губок захвата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Рука манипулятора | 1987 |
|
SU1505772A1 |
| Манипулятор для автоматической смены инструментов | 1986 |
|
SU1393578A1 |
| Устройство для сборки деталей | 1979 |
|
SU917994A1 |
| Винтовой пресс | 1983 |
|
SU1172745A1 |
| Захват | 1977 |
|
SU667396A1 |
| Механизм для открывания и закрывания откидной крышки ящика | 1985 |
|
SU1339050A1 |
| Захват | 1976 |
|
SU558789A1 |
| Многопозиционная машина для вставки книжных блоков в переплетные крышки | 1956 |
|
SU119170A1 |
| Захватное устройство манипулятора | 1987 |
|
SU1458222A1 |


1. МАНИПУЛЯТОР, содержащий смонтированные на стойке захват с приводом разведения губок, механизм горизонтального перемещения, механизм вертикального перемещения и вращения захвата с 60 приводами в виде силовых цилиндров и узел регулировки скоростей перемещения захвата, выполненный, например, в виде дросселя, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен фрикционной передачей, а механизм вертикального перемещения и вращения захвата выполнен в виде установленной с возможностью осевого перемещения и вращения щтанги, несущей захват, связанной со щтоком силового цилиндра посредством роликов и пластин, имейщих наклонные пазы, и фрикционной передачи. i (Л СП о 00 05
1
Изобретение относится к специальному технологическому оборудованию, а именно к манипуляторам, предназначенным для захвата и пространственного перемещения деталей при автоматизации различных технологических процессов, и может быть использовано в автоматических линиях многопозиционных сборочных автоматов, в частности, при изготовлении лентопротяжных механизмов. (ЛПМ) магнитофонов и т.п. в условиях серийного и массового производства.
Известен манипулятор, содержаш,ий сыоц тированные на стойке захват с приводом разведения губок, механизм горизонтального перемещения, механизм вертикального перемещения и вращения захвата с приводами в виде силовых цилиндров и узел регулировки скоростей перемещения захвата, выполненный, например, в виде дросселя 1.
Недостатками данного манипулятора являются его ограниченные технологические возможности с точки зрения автоматизации осевой сборки соединений типа валвтулка для призматических деталей, произвольно ориентированных друг относительно друга по углу в плане, так как движение ротации захвата и его поступательное перемещение в направлении сборки осуществляются от двух независимых пневмоприводов, что затрудняет синхронизацию этих движений, делает практически невозможным своевременное выключение ротации в момент уст ранения рассогласования сечений деталей по углу в плане (этот момент является случайной величиной из-за неопределенности угла рассогласования).
Цель изобретения - расширение технологических возможностей.
Поставленная цель достигается тем, что манипулятор, содержащий смонтированные на стойке захват с приводом разведения губок, механизм горизонтального перемещения, механизм вертикального перемещения и вращения захвата с приводами в виде силовых цилиндров, и узел регулировки скоростей перемещения захвата, выполненный, например, в виде дросселя, снабжен фрикционной передачей, а механизм вертикального перемещения и вращения захвата выполнен в виде установленной с возможностью осевого перемещения и вращения штанги, несущей захват, связанной со щтоком силового цилиндра посредством роликов и пластин, имеющих наклонные пазы, и фрикционной передачи.
Кроме того, пластины выполнены сменными, а пазы на них имеют различные углы наклона.
0 С целью кратковременного отключения вращения захвата, стойка снабжена клином, кинематически связанным с фрикционной передачей.
С целью улучшения эксплуатационных возможностей, штанга выполнена полой, а ее внутренняя полость герметично связана с приводом разведения губок захвата.
На фиг. 1 изображен предлагаемый манипулятор, (левая часть), общий вид; на фиг. 2 - то же (правая часть); на фиг. 3 - вид по стрелке А на фиг. 2; на фиг. 4 - узел I на фиг. 2.
Манипулятор содержит стойку 1, на которой установлен механизм 2 горизонтального перемещения, включающий силовой цилиндр 3 со штоком 4 и параллельные ска5 лки 5, стянутые на концах передней 6 и задней 7 колодками. Скалки 5 выполнены полыми, В штоке 4 выполнены с двух сторон глубокие сверления и радиальные отверстия для подвоЛа рабочей среды в левую и правую полости силового цилиндра 3. На колод0 ках 6. и 7 установлена платформа 8, на которой в горизонтальном положении крепится силовой цилиндр 9 механизма вертикального перемещения. Силовой цилиндр 9 содержит щток 10 с закрепленнь.1ми на его концах задней 11 и передней 12 колодками.
-5 В корпусе цилиндра 9 выполнен канал для подвода рабочей среды в левую полость цилиндра 9, а в щтоке 10 - канал и радиальные отверстия для подвода рабочей среды в его правую полость.
0 Со стороны задних колодок 7 и 11 в штоки 4 и 10 и скалки 5 вворачиваются штуцера 13.
На корпусе цилиндра 9 установлен бесконтактный датчик 14, а на задней колодке 11 - постоянный магнит 15, который вызывает срабатывание датчика 14 при выдвинутом штоке 10.
К передней колодке 6 пристыкован кронштейн 16 с каналами для подвода рабочей среды в правую полость цилиндра 3, а также через ряд промежуточных деталей к захвату 17.
В направляюш,их втулках 18 кронштейна 16 установлена вертикальная полая штанга 19, заглушенная по верхнему торцу. На штанге 19 с возможностью перемешения вдоль ее оси установлен ползун 20, уплотненный манжетами 21 и резиновыми кольцами 22. В ползуне 20 расположен штуцер 23, который гибкой трубкой 24 связан с одним из каналов кронштейна 16. От поворота ползун 20 удерживается двумя роликами 25.
Захват 17 связан с фланцем штанги 19 посредством четырех упругих параллельных стержней 26 и плавающей крестовой муфты 27, а с внутренней полостью штанги 19 - гибкой трубкой 28, что в совокупности обеспечивает возможность плоскопараллельного переноса оси Б захвата 17- при приложении к нему усилия в горизонтальной плоскости.
Во фланце 29 захвата 17 установлены упорные винты 30, выставляемые с минималь ным зазором относительно верхнего торца В цилиндра захвата 17 и разгружающие упру гие стержни 26 при значительных осевых усилиях. Крестовая муфта 27 предохраняет стержни 26 от скручивания при приложении к захвату 17 крутящего момента.
На штанге 19 установлены также пружина 31 сжатия для демпфирования осевого усилия, передаваемого от ползуна 20 на штангу 19, и втулка 32 с продольным пазом, обеспечивающим развязку последней и штанги 19 в осевом направлении и их совместное вращение через штифт 33. На кронштейне 16 установлены ролик 34 и зубчатое колесо 35, выполненные в виде моноблока. Пружина 36 и гайка 37 обеспечивают поджатие втулки 32 к ролику 34 с регулируемым усилием. Ролик 34 и втулка 32 образуют фрикционную передачу.
На колодках 11 и 12 цилиндра 9 закреплены пластины 38 и 39 с наклонными пазами, стенками которых они через ролики 40 воздействуют на ползун 20 и через пружину 31 вызывают вертикальное перемещение захвата 17. Реак-ивные вертикальные усилия на пластины 38 и 39 воспринимают ролики 41 кронштейна 16. На пластине 39 установлена рейка 42, находящаяся в зацеплении с зубчатым колесом 35. Втулка 43 служит для передачи вертикального усилия от ползуна 20 на штангу 19, минуя пружину 31 (после сжатия пружины 31 до высоты, равной глубине отверстия во втулке 43).
На кронштейне 16 установлен также качающийся рычаг 44, а на корпусе 3 - клин 45, который в определенный момент цикла (например, при вдвинутой руке манипулятора) через рычаг 44 отключает фрикционную передачу, т.е. прерывает движение ротации захвата 17. Винт 46 служит для отключения движения ротации захвата 17 в течение всего цикла работы манипулятора.
В манипуляторе имеются регулировочные винты 47-49 для точной настройки на заданные точки позиционирования и регулировки ходов.
Юстировочные винты 50 и 51 служат для совмещения осей захватываемой детали и штанги 19.
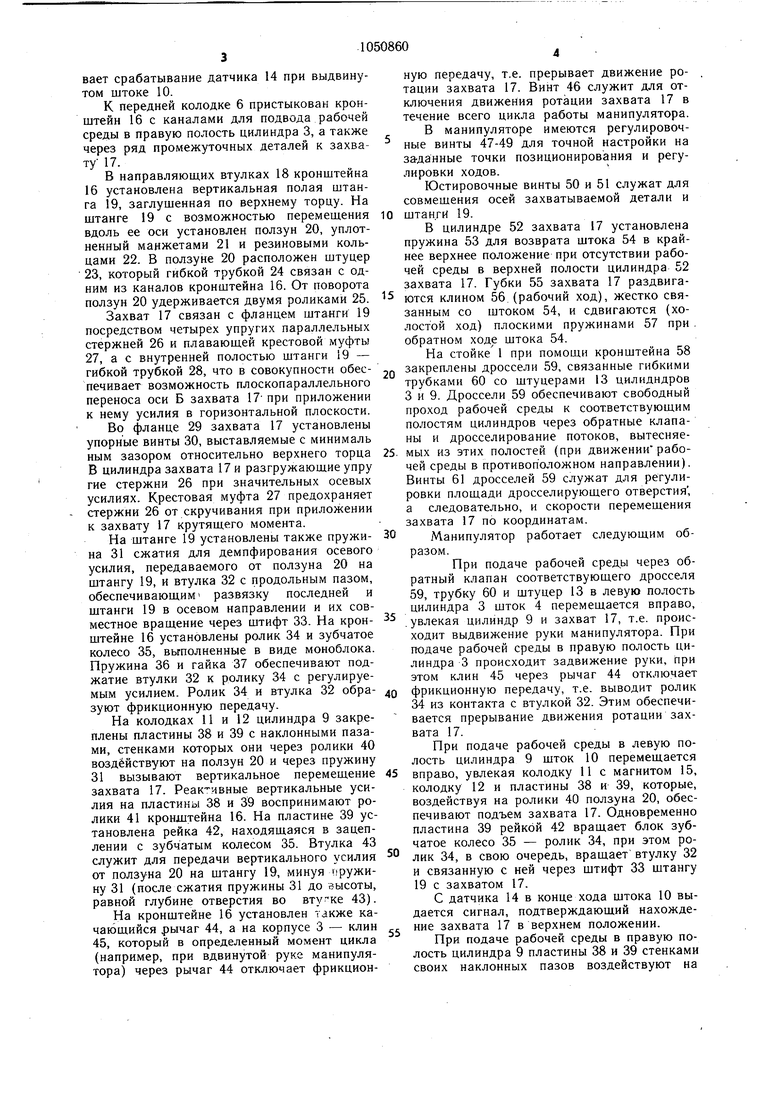
В цилиндре 52 захвата 17 установлена пружина 53 для возврата штока 54 в крайнее верхнее положение при отсутствии рабочей среды в верхней полости цилиндра 52 захвата 17. Губки 55 захвата 17 раздвигаются клином 56 (рабочий ход), жестко связанным со штоком 54, и сдвигаются (холостой ход) плоскими пружинами 57 при . обратном ходе штока 54.
На стойке 1 при помощи кронштейна 58 закреплены дроссели 59, связанные гибкими трубками 60 со штуцерами 13 цилидндров 3 и 9. Дроссели 59 обеспечивают свободный проход рабочей среды к соответствующим полостям цилиндров через обратные клапаны и дросселирование потоков, вытесняемых из этих полостей (при движениирабочей среды в противоположном направлении). Винты 61 дросселей 59 служат для регулировки площади дросселирующего отверстия, а следовательно, и скорости перемещения захвата 17 по координатам.
Манипулятор работает следующим образом.
При подаче рабочей среды через обратный клапан соответствующего дросселя 59, трубку 60 и щтуцер 13 в левую полость цилиндра 3 шток 4 перемещается вправо, .увлекая цилиндр 9 и захват 17, т.е. происходит выдвижение руки манипулятора. При подаче рабочей среды в правую полость цилиндра 3 происходит задвижение руки. При этом клин 45 через рычаг 44 отключает фрикционную передачу, т.е. выводит ролик 34 из контакта с втулкой 32. Этим обеспечивается прерывание движения ротации захвата 17.
При подаче рабочей среды в левую полость цилиндра 9 шток 10 перемещается вправо, увлекая колодку 11 с магнитом 15, колодку 12 и пластины 38 и 39, которые, воздействуя на ролики 40 ползуна 20, обеспечивают подъем захвата 17. Одновременно пластина 39 рейкой 42 вращает блок зубчатое колесо 35 - ролик 34, при этом ролик 34, в свою очередь, вращает втулку 32 и связанную с ней через штифт 33 щтангу 19 с захватом 17.
С датчика 14 в конце хода штока 10 выдается сигнал, подтверждающий нахождение захвата 17 в верхнем положении.
При подаче рабочей среды в правую полость цилиндра 9 пластины 38 и 39 стенками своих наклонных пазов воздействуют на ролики 40 ползуна 20 и через пружину 31 вызывают опускание захвата 17 с одновременным его вращением через фрикционную передачу. Для обоих цилиндров регулировка скоростей координатных перемещений обеспечивается винтами 61 дросселей 59. Крутящий момент, передаваемый на захват 17, определяется моментом проскальзывания фрикционной передачи, который регулируется путем сжатия пружины 36 гайкой 37. Для использования максимального верти кального усилия, развиваемого манипулятором (например, для выполнения сопряжений по переходным посадкам и т.п.), после сжатия пружины 31 до высоты, равной глубине отверстия во втулке 43, усилие с ползуна 20 через втулку 43 непосредственно передается на штангу 19 с захватом 17. Это усилие можно изменять за счет угла наклона пазов пластин 38 и 39 (практически заменой пластин). При подаче рабочей среды в верхнюю полость цилиндра 52 захвата 17 шток 54 с клином 56 движется вниз и раздвигает губки 55, что соответствует рабочему движению - захвату детали. Возврат губок 55 происходит под действием плоских пружин 57, а штока 54 - под действием пружины 53. Из исходного положения захват 17 без ротации опускается, мягко накрывая пяткой 62 деталь, подлежащую захвату на исходной позиции. Мягкость начального касания обеспечивается пружиной- 31. Далее срабатывает захват 17 (происходит захват детали), и рука с деталью поднимается вверх. Затем рука выдвигается, клин 45 освобождает рычаг 44, включается в работу фрикционная передача. Опускание захвата 17 сопровождается его ротацией. После касания торцов сопрягаемых деталей поступательное движение вниз штанги 19 с захватом 17 приостанавливается, а продолжаются движение вниз ползуна 20, сжимающего пружину 31, и вращение устанавливаемой детали на торце базовой детали. Одновремен но происходит совмещение осей сопрягаемых деталей вследствие деформации упругих стержней 26 под действием горизонтальных реактивных составляющих усилия сборки, возникающих на фаске, и совмещение сечений деталей по углу в плане (вследствие вращения). В момент полного совмещения сопрягаемых деталей пружина 31 досылает захват 17 с устанавливаемой деталью вниз и дальнейшее сопряжение вдоль оси сопровождартся пробуксовкой фрикционной передачи. При этом плавающая крестовая муф та 27 разгружает стержни 26 от крутящего момента, а упорные винты 30 - от осевого усилия. По окончании движения вниз захват 17 разжимается (губки 55 сходятся) и продолжается отработка движений по программе без детали. Датчик 14 с магнитом 15 служат для выработки сигнала, блокирующего работу сопряженного с манипулятором оборудования (например, многопозиционного поворотного стола и т.д.). Предлагаемый манимулятор обладает значительно большими технологическими возмо кностями по сравнению с прототипом, так как обеспечивает автоматическую сборку соединений из призматических деталей, осуществляя одновременно как совмещение их осей, так и взаимную ориентацию по углу в плане. Кроме того, в манипуляторе предусмотрена возможность регулировки величины сборочного усилия и скоростей перемещений в зоне малых величин.
w
.11д
62
| Г | |||
| Сортировка для зерна | 1924 |
|
SU2717A1 |
| Проспект ЦНИИТЭИприборостроения, 1978. | |||
