Изобретение относится к подъемно- транспортной технике, в частности к устройствам для перегрузки пакетированных грузов на поддонах.
Цель изобретения - повьшение удоб- ства эксплуатации.
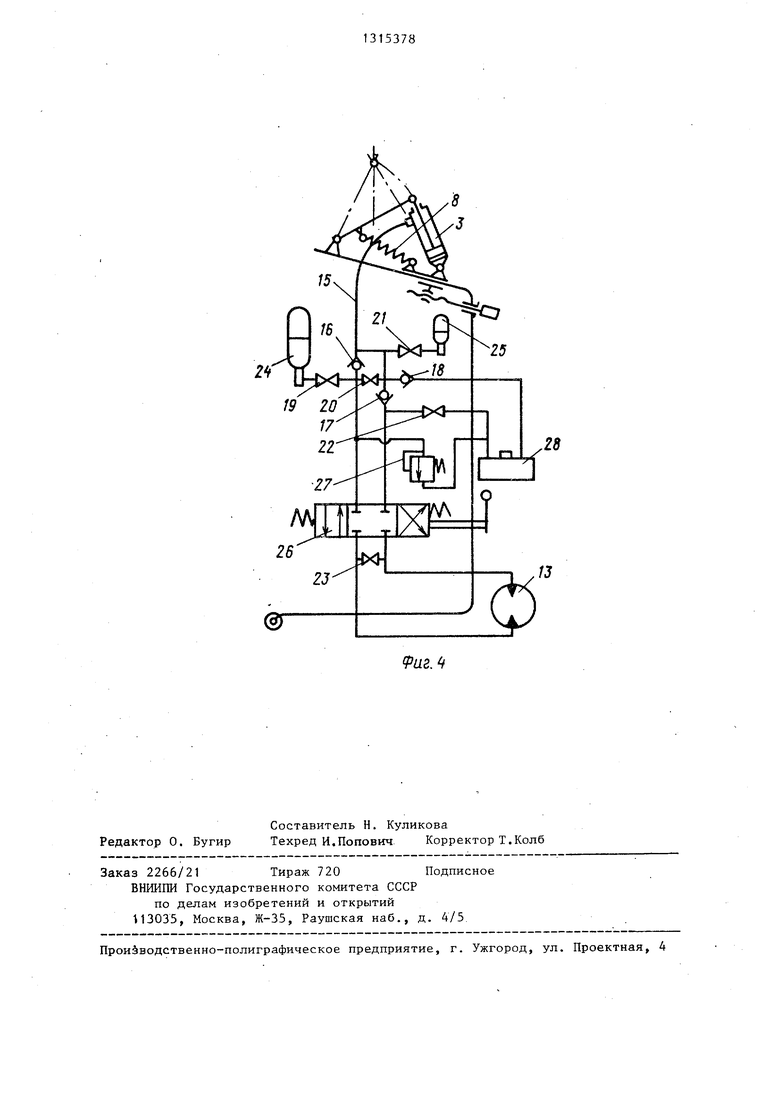
На фиг.1 показана технология работы захвата, где а - установка хвата краном перед пакетом, б - наклон носка вил вверх (oi), в - наклон носка вил вниз (/ь), г,д - работа захвата на жестком основании с использованием гидропривода (причал, пайол судна, пол вагона), е,ж - работа захвата на мешковых грузах с использованием переносного фальшпайо- ла и гидропривода; на фиг.2 - захват общий вид; на фиг.З - вид А на фиг.2 на фиг.4 - принципиальная гидросхема привода захвата.
Захват содержит Г-образную раму 1 в коробчатой конструкции, которая на горизонтальной части шарнирно связана системой подвески захвата в виде треугольника, состоящего из тяги 2 и штокового гидроцилиндра 3, который нижним концом соединен с ползуном 4, фиксируемым винтом 5. Штоковый ци-. линдр 3 с тягой 6 ограничения хода и тяга 2 шарнирно соединены со скобой 7 для подвески на крюк крана. Тяга 2 и ползун 4 соединены вспомогательной пружиной 8. Нижняя часть рамы 1 Т-образно приварена с плитой 9, которая удерживает переставные вилы 10, осна- щенные на.концах роликами 11. Симметрично вертикальной стойке рамы 1 на плите 9 установлены пневмоколеса 12 и гидромотор 13, а к стойке - скоба 14 для ручного ориентирования захвата относительно пакета.
Гидропривод захвата с закрытой системой циркуляции жидкости содержит поршневой г,идроцилиндр 3, трубопровод 15, обратные клапаны 16-18, вентили 19-23, гидроаккумуляторы 24 и 25, распределительньй золотник 26 с автоматической фиксацией среднего положе- ния, предохранительный клапан 27, маслобак 28, гидромотор 13.
Устройство работает следующим образом.
Уравновешивание захвата обеспечивается системой подвеса в зависимости от положения тяги 2 и штока гидроцилиндра 3, определяющих положение скобы 7.
5 0
5
0
0
5
5
При втянутом штоке порожний захват удерживает вилы в горизонтальном по- ложении, так как точка подвеса (шарнир скобы 7) лежит на вертикали с центром тяжести порожнего захвата. Штоковая полость цилиндра заполнена маслом.
При вьщвинутом штоке груженый захват также удерживает вилы в горизонтальном положении, так как точка подвеса лежит на вертикали центра тяжести равнодействующей масс захвата и груза. В штоковой полости масло отсутствует. Для разгрузки конструкции гидроцилиндра предусматривается тяга 6.
Рассмотрим работу захвата варианта Причал-трюм.
Исходное положение захвата. Гидросистема заполнена маслом, шток гидро цилиндра в нижнем положении, гидроаккумулятор 24 высокого давления (ВД) заряжен на два объема цилиндра с запасом и подключен к системе, все вентили закрыты, кроме вентиля 21 и гидроаккумулятора 25 низкого давления (НД), удерживающего масло в цилиндре при давлении от порожнего захвата с учетом вспомогательной пружины 8- (фиг.4).
Портальный кран подает захват к штабелю пакетов на причале,.оставляя зазор 300-400 мм. Докер с помощью скобы 14 в зависимости от С1:туации ориентирует захват и вилы на поддон пакета, иногда отклоняя его в двух направлениях. При достижении необхо- ДИМОЙ направленности вил захват опускается на поверхность причала (фиг.1 а).
При необходимости захват вручную подкатывают к поддону, направляя ролик 11 в пазы поддона. На период ручной перекатки захвата открывается вентиль 23. Затем закрывают вентиль
21и открывают вентили 19 и 22. Включается распределительный золотник 26 на передний ход.
При этом масло из гидроаккумулятора ВД 24 по магистрали проходит через золотник 26, гидромотор 13, вентиль
22и поступает в маслобак 28.
В конце хода захвата отключается золотник 26 (устанавливается в среднее положение), закрывается вентиль 22
Захват готов к подъему пакета портальным краном.
При подъеме захвата с грузом вступает в работу цилиндр 3, масло по магистрали 15 поступает через обратный клапан 16, вентиль 19 в гидроаккумуПосле этого захват с грузом опускают на причал, ослабляют канат подвески захвата. Вспомогательная пружина 8 через тягу 2 возвращает поршень гидлятор ВД 24, а при резком рывке череч Роцилиндра 3 в нижнее положение, пропредохранительный клапан 27 в маслобак 28.
Тяга 2, отклоняясь вверх, натягивает вспомогательную пружину 8. - После переноса захвата с грузом на просвет люка его устанавливают на штатное место в штабеле (в начале на пайол, затем на слои ранее уложенных пакетов), канат при этом ослаблен (фиг.1 д).
Включается распределительный золотник 26 на задний ход. Масло из гидроаккумулятора 24 через вентиль 19, золотник 26, гидромотор 13, обизводя подсос масла из маслобака 28 через обратный клапан 18. Б случае недохода поршня возможно дополнить емкость цилиндра от гидроаккумулятора
10 24 через вентиль 20, который затем вновь закрывается.
После заполнения маслом цилиндра 3 производится вновь подъем захвата с грузом. При подъеме вновь произвоt5 дится зарядка гидроаккумулятора 24. При этом операция подъема захвата с грузом на причале по заполнению маслом агрегатов системы аналогична операции при подъеме первого пакета, т.е.
ратный клапан 17, трубопровод 15 пос-20 далее операции повторяются, обеспечитупает в гидроцилиндр 3, заполняя штоковую полость цилиндра.
После отъезда захвата из-под пакета золотник 26 выключается (устанаввая циркуляцию масла в гидросистеме.
Для повышения надежности перегрузки пакетированных грузов крановыми вилочными захватами с однобалочной
.ливается в среднее положение), откры- 5 несущей конструкцией он может быть
вается вентиль 21, и захват готов к подъему и переносу на причал.
Захват переносится к штабелю пакетов на причале, производится нацели- .вание вил на пазы поддона, устанавливаются и затем ослабляется канат подвески крана.
При включении распределительного золотника 26 на передний ход захват подъезжает под пакет.
При зтом масло из гидроаккумулятора 24 по магистрали проходит через золотник 26, гидромотор 13, вентиль 22, поступает в маслобак 28.
После этого маслобак заполняется двумя ходами гидроцилиндра 3, а гидроаккумулятор 24 расходует зарядную емкость тоже в два хода цилиндра. Поэтому гидросистему необходимо вос30
35
40
выполнен со съемной вертикальной рамкой для упора груза облегченной конструкции по аналогии с захватами на колесных погрузчиках.
Формула изобретения
Захват, преимуш;ественно для грузов на поддонах, содержащий подвеску, включающую в себя тяги, одна из которых выполнена изменяемой длины, Г- образный несущий элемент и прикрепленные в его нижней части вилы, отличающийся тем, что, с целью noBbmieHHH удобства в эксплуатации, тяги подпружинены между собой, а тяга изменяемой длины представляет собой гидроцилиндр, при этом захват снабжен закрепленными на концах вил роликами и прикрепленными к несущей
становить в рабочее состояние. Закры- раме со стороны, противоположной ви- вают вентиль 21, поднимают захват с грузом на высоту 300-500 мм и заряжают гидроаккумулятор 24, так как масло из гидроцилиндра 3 по трубопроводу 15 поступает через обратный клапан 16, вентиль 19 в гидроаккумулятор 24.
лам, проводными колесами, привод которых представляет собой гидромотор, с которым через управляемый распределительный золотник соединен гидроак- кумулятор, соединенный с гидроцилиндром подвески.
После этого захват с грузом опускают на причал, ослабляют канат подвески захвата. Вспомогательная пружина 8 через тягу 2 возвращает поршень гидРоцилиндра 3 в нижнее положение, производя подсос масла из маслобака 28 через обратный клапан 18. Б случае недохода поршня возможно дополнить емкость цилиндра от гидроаккумулятора
24 через вентиль 20, который затем вновь закрывается.
После заполнения маслом цилиндра 3 производится вновь подъем захвата с грузом. При подъеме вновь производится зарядка гидроаккумулятора 24. При этом операция подъема захвата с грузом на причале по заполнению маслом агрегатов системы аналогична операции при подъеме первого пакета, т.е.
далее операции повторяются, обеспечивая циркуляцию масла в гидросистеме.
Для повышения надежности перегрузки пакетированных грузов крановыми вилочными захватами с однобалочной
несущей конструкцией он может быть
0
5
0
выполнен со съемной вертикальной рамкой для упора груза облегченной конструкции по аналогии с захватами на колесных погрузчиках.
Формула изобретения
Захват, преимуш;ественно для грузов на поддонах, содержащий подвеску, включающую в себя тяги, одна из которых выполнена изменяемой длины, Г- образный несущий элемент и прикрепленные в его нижней части вилы, отличающийся тем, что, с целью noBbmieHHH удобства в эксплуатации, тяги подпружинены между собой, а тяга изменяемой длины представляет собой гидроцилиндр, при этом захват снабжен закрепленными на концах вил роликами и прикрепленными к несущей
раме со стороны, противоположной ви-
лам, проводными колесами, привод которых представляет собой гидромотор, с которым через управляемый распределительный золотник соединен гидроак- кумулятор, соединенный с гидроцилиндром подвески.
ХЧ
Jt.
.ч/ 
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод рабочих органов лесозаготовительной машины | 1989 |
|
SU1652703A2 |
| САМОЗАГРУЖАЮЩИЙСЯ РАЗБРАСЫВАТЕЛЬ УДОБРЕНИЙ | 2008 |
|
RU2363133C1 |
| Захват-кантователь | 1980 |
|
SU922032A1 |
| Предохранительное устройство для предотвращения опрокидывания стреловой грузоподъемной машины на гусеничном ходу | 1985 |
|
SU1291533A1 |
| Гидросистема управления сельскохозяйственными орудиями | 1988 |
|
SU1618301A1 |
| Механизм вертикального перемещения грузоподъемника крана-штабелера | 1989 |
|
SU1677020A1 |
| Землеройно-мелиоративная машина | 1974 |
|
SU613027A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 1992 |
|
RU2037677C1 |
| ГИДРОПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1995 |
|
RU2087408C1 |
| Рыхлитель | 1989 |
|
SU1666659A1 |

Изобретение относится к подъемно-транспортному оборудованию в частности к захватам. Целью изобретения является повышение удобст -а в эксплуатации. Захват содержит Г-об- разную раму 1. В нижней части рамы 1 прикреплены вилы 10с роликами 1Т на концах. Раму 1 навешивают на крюк крана посредством подвески, включающей подпружиненные между собой тягу 2 и гидроцилиндр 3. На раме 1 закреплены колеса 12, вращающиеся от гидромотора, соединенного через управляемый распределительный золотник с гидроаккумулятором, который соединен с гидроцилиндром 3 подазески. Уравновешивание захвата обеспечивается тягой 2и гидроцилиндром 3. Гидроцилиндр 3подвески при подъеме груза производит зарядку гидроаккумулят,ора, КОТО рый при захвате пакета и отводке из- под пакета используется для привода колес посредством гидромотора. 4 ил. i (Л оо СП 00.. 00
Видя
fuz.3
Редактор 0. Бугир
Составитель Н, Куликова
Техред И.Попович Корректор Т.Колб
Заказ 2266/21 Тираж 720 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий Л3035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
аг.
| Захват для пакетов | 1972 |
|
SU629157A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
