1
Изобретение относится к грузозахватным устройствам для штучных грузов, например пакетов.
Известны С-образные захваты для пакетов, навешиваемые на крюк грузоподъемного механизма. Однако такие захваты имеют самоцентрирующие механиз.чы и прижимные устройства сложного конструктивного исполнения 1.
Известен также захват для пакетов, содержащий С-образную раму, щарнирно закрепленный на ней рычаг, на одном конце которого установлена прижимная колодка, и самоцентрирующий механизм, состоящий из строп подвески захвата, один из которых подпружинен 2.
С помощью самоцептрирующего механизма обеспечивается горизонтальное положение загруженной и незагруженной рам, а прижимная колодка предохраняет пакет от рассыпания.
Недостатком захватов подобного типа является сложность конструкции, а также невозможность поджатия различных по высоте пакетов.
Целью изобретения является обеспечение прижатия различных по высоте пакетов.
Это достигается тем, что второй конец рычага соединен с подпружиненным стропом и с помощью пружины - с рамой.
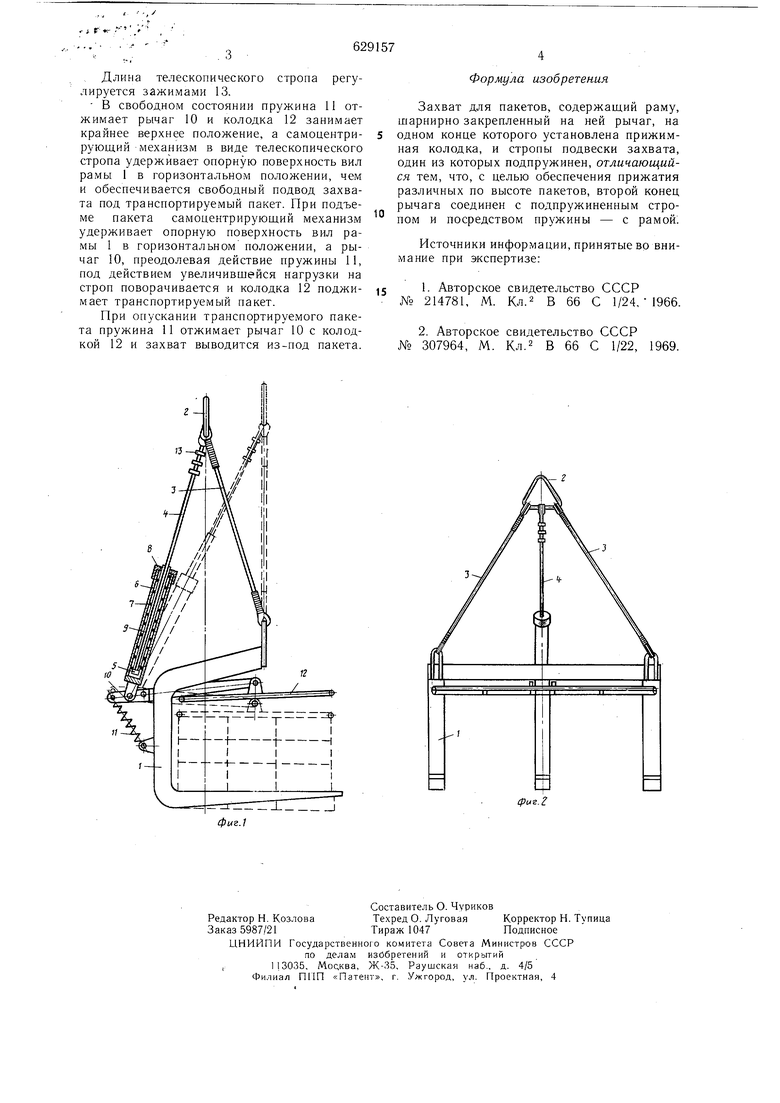
На фиг. 1 и 2 показан предлагаемый захват.
Захват состоит из С-образной рамы 1, серьги 2, при помощи которой захват навешивается на крюк грузоподъемного механизма, канатных строп 3 и одного телескопически убирающегося стропа, состоящего из каната 4, жестко заделанного в муфту 5, гильзы 6 и пружины 7.
На верхний конец гильзы навинчена гайка 8, в которую упирается верхний конец пружины 7.
Для предохранения от истирания каната 4 о гайку 8 на него надета труба 9.
Нижним концом гильза 6 щарнирно соединена с двуплечим рычагом 10, шарнирно закрепленным на раме 1 и подпружиненным пружиной 11. На другом конце двуплечего рычага щарнирно закреплена прижимная колодка 12.
Длина телескопического стропа регулируется зажимами 13.
В свободном состоянии пружина И отжимает рычаг 10 и колодка 12 занимает крайнее верхнее положение, а самоцентрирующий механизм в виде телескопического стропа удерживает опорную поверхность вил рамы 1 в горизонтальном положении, чем и обеспечивается свободный подвод захвата под транспортируемый пакет. При подъеме пакета самоцентрирующий механизм удерживает опорную поверхность вил рамы 1 в горизонтальном положении, а рычаг 10, преодолевая действие пружины 11, под действием увеличившейся нагрузки на строп поворачивается и колодка 12 поджимает транспортируемый пакет.
При опускании транспортируемого пакета пружина 11 отжимает рычаг 10 с колодкой 12 и захват выводится из-под пакета.
Формула изобретения
Захват для пакетов, содержащий раму, шарнирно закрепленный на ней рычаг, на одном конце которого установлена прижимная колодка, и стропы подвески захвата, один из которых подпружинен, отличающийся тем, что, с целью обеспечения прижатия различных по высоте пакетов, второй конец рычага соединен с подпружиненным стропом и посредством пружины - с рамой
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР
№ 214781, М. Кл.2 В 66 С 1/24, 1966.
2.Авторское свидетельство СССР
№ 307964, М. Кл.2 в 66 С 1/22, 1969.
г -
фиг.1
Cpus.Z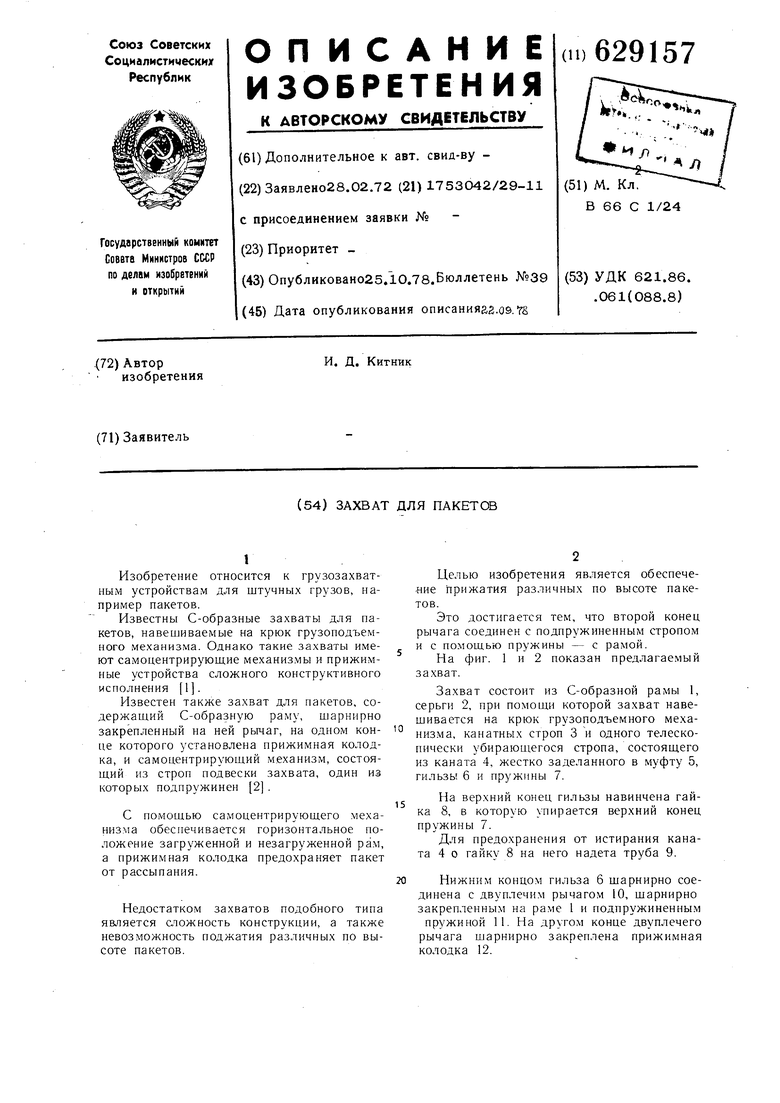
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1986 |
|
SU1384519A1 |
| ЗАХВАТ ДЛЯ ЛИСТОВОГО МАТЕРИАЛА | 1969 |
|
SU256196A1 |
| ВИЛОЧНЫЙ ЗАХВАТ ДЛЯ ПАКЕТИРОВАННЫХ ГРУЗОВ | 1969 |
|
SU233858A1 |
| Захватное устройство для ящиков | 1972 |
|
SU464516A1 |
| Грузозахватное устройство | 1980 |
|
SU931656A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ВИЛОЧНОГО ПОГРУЗЧИКА | 1991 |
|
RU2011636C1 |
| Трелевочная каретка подвесной канатной дороги | 1984 |
|
SU1296459A1 |
| БОКОВОЕ ЗАЖИМНОЕ УСТРОЙСТВО К ПОГРУЗЧИКУ | 1991 |
|
RU2011635C1 |
| Захват для длинномерных изделий | 1977 |
|
SU627057A1 |
| ВИЛОЧНЫЙ ЗАХВАТ | 1992 |
|
RU2047551C1 |
