1
Изобретение относится к .системам регулирования и управления и может быть использовано в системах программного управления станков и испыта- телъных установок.
Цель изобретения - повьшение точности компенсаций периодической составляющей ошибки при циклическом изменении задания.
На чертеже представлена функциональная схема системы автоматического управления, .
Система автоматического управления содержит блок 1 циклического задания 5 первый сумматор 2, измеритш ь 3 рассогласования, блок 4 управления объект 5, измерительное устройство б второй сумматор 7, первый регистр 8, запоминающее устройство 9, блок 10 деления, второй регистр 11, задающий генератор 12, элемент 13 задержки, вход 14 Подготовка 5 вход 15 Пуск
Система работает следующим образом.
Поступление сигнала на вход 14 Подготовка вызывает начальную установку блока 1 циклического задания (переход на начало программы) и Сброс содержимого регистров 8 и 11 и запоминающего устройства 9. Поступление сигнала на вход 15 Пуск вызывает появление импульсов синхронизации на выходе задающего генератора 12. Первый импульс на входе синхронизации блока 1 циклического задания (содержащего N значений сигнала задания) вызывает появление на его выходе первого цифрового сигнала задания который через первый суг-вчатор 2 (сиг наи на выходе запоминающего устройства 9 равен нулю) поступает на первый вход блока 4 управления и отрабатывается замкнутым контуром регулирования, образованным блоком 4 управления, объектом 5 и измерителы-шм устройством 6. Результата отработки сигнала задания снимается с выхода измерительного устройства 6 и поступает на второй вход измерителя 3 рассогласования где сравнивается с сигналом задания, поступающим на его первый вход. Результат сравнения (ошибка) в цифровом виде через второй сумматор 7 (сигнал на выходе второго регистра 11 равен нулю) поступает на информационный вход первого регистра 8..Через интервал времени, необходимый для достижения установив15
159352
шегося состояния на выходе второго сумматора 7, импульс синхронизации с выхода задающего генератора 12 через элемент 13 задержки поступает
5 на вход записи первого регистра 8, в результате чего происходит запись сигнала ошибки в первый регистр 8, На этом заканчивается первый период квантования.
Поступление второго импульса с выхода задающего генератора 12 вызывает, поступление на вход блока 4 управления второго сигнала задания и запись в запоминающее устройство 9 содержимого первого регистра 8 и с задержкой времени запись в первый регистр 8 нового значения ошибки.
Отработка следующих импульсов задающего генератора 12 происходит ана логично, при этом содержимое запоминающего устройства 9 продвигается к его выходу так, что поступление N-ro импульса синхронизации приводит
-, к его полному заполнению. На его вы- э
ходе появляется значение сигнала
ошибки, измеренное на первом периоде квантования, и поступает через блок 10 делеьшя на второй вход первого сумматора 2, В результате на вход блока 4 управления поступает сигнал управления, paBiibm сумме текущего сигнала задания и сигнала компенсации, сдвинутого в сторону опережения на один такт, что необходимо для осу0
5
ществления синхронизации процесса
компенсации„ На этом заканчивается . первый цикл управления.
Поступление (N + 1)-го и последующих импульсов с выхода задающего генератора 12 вызывает появление на выходе блока 1 циклического задания сигнала задания, соответствующего номеру импз льса в текущем цикле заДания, запись во второй регистр 11 суммарного сигнала ошибок отработки, соответствующих этому номеру импульса во всех предыдущих циклах задания, поступающего с выхода запоминающего
устройства 9, запись в запоминающее устройство 9 содержимого первого регистра 8 и появление на его выходе нового суммарного сигнала. Через интервал времени, определяемый элементом 13 задержки, происходит запись в регистр 8 сигнала с выхода второго сумматора 7, равного сумме сигнала ошибки, поступающего на его вход с выхода измерителя 3 рассогласования,
и суммарного сигнала ошибок отработки на всех-предьщущих циклах задания, поступающего на второй вход с выхода второго регистра 11. Суммарный сигнал с выхода запоминающего устройства 9 поступает на-вход блока 10 деления, где уменьшается в К раз и в качестве компенсационного сигнала передается на второй вход сумматора 2.
ненные объект и измерительное устройство соединен с вторым своим вхо дом и вторым входом измерителя рассогласования, второй сумматор, подключенный выходом к информацион- ному входу первого регистра, выход которого соединен с информационным входом запоминающего устройства, под ключенного выходом к информационному
Работа элементов 2,3,4,5 и 6 сие- О входу второго регистра, выход кототемы аналогична указанному для первого цикла задания.
Таким образом, обеспечивается итерационный процесс компенсации ошибки системы автоматического управ ления при циклическом изменении управляющих воздействий, а также синхронных с ними возмзпцающих воздействий с точностью до единицы дискреты измерителя рассогласования.
Технические преимущества предлагаемого устройства по сравнению с известным заключаются в повьшении точности компенсации без изменения количественного состава устройства. Формула изобретения
Система автоматического управления, содержащая блок деления, блок циклического задания, выход которого соединен с первыми входами измерителя рассогласования и первого сумматора, подключенного выходом к первому входу блока управления, выход которого через последовательно соедиРедактор И.Горная
Составитель В.Башкиров Техр ед Л.Олийнык
Заказ 2359/49
Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Паушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Прое.ктная, 4
ненные объект и измерительное устройство соединен с вторым своим входом и вторым входом измерителя рассогласования, второй сумматор, подключенный выходом к информацион- ному входу первого регистра, выход которого соединен с информационным входом запоминающего устройства, подключенного выходом к информационному
входу второго регистра, выход котоf5
20
25
30
,рого соединен с первым входом второго сумматора, задающий генератор, выход которого соединен с входами синхронизации блока циклического задания и запоминающего устройства, входом записи второго регистра и че- . рез элемент задаржки с входом записи первого регистра, вход Подготовка системы автоматического управления соединен с входом начальной установки блока циклического задания и входами сброса первого и второго регистров и запоминающего устройства,, а вход Пуск - с входом запуска задающего генератора, отличающая- с я тем, что, с целью повьшения точности компенсации периодической составляющей ошибки при циклическом изменении задания, выход измерителя рассогласования соединен с вторым входом второго сумматора, а вход и выход блока деления - соответственно с выходом запоминающего устройства и вторым входом первого сумматора.
Корректор Г.Решетник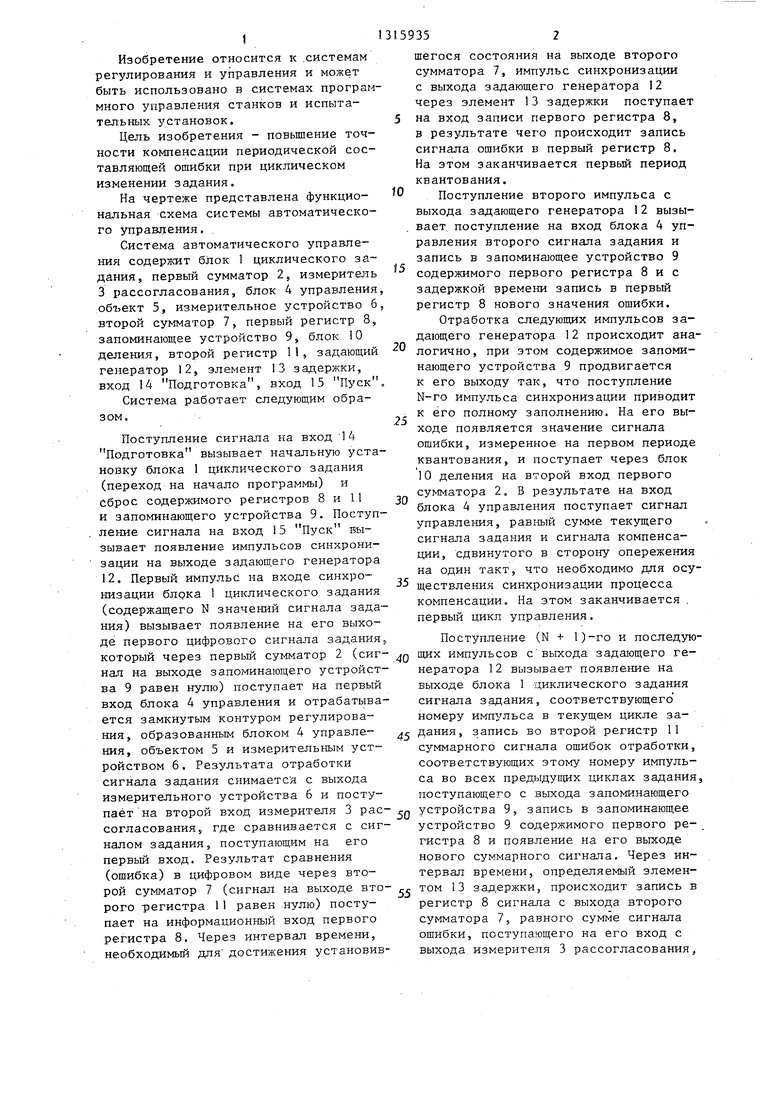

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления | 1984 |
|
SU1234810A1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕНИЯ ВЫЧИСЛИТЕЛЬНОЙ МАШИНЫ С КАНАЛАМИ СВЯЗИ | 1990 |
|
RU2020565C1 |
| Параллельно-последовательный аналого-цифровой преобразователь | 1985 |
|
SU1305851A1 |
| Устройство для опроса информационных каналов | 1982 |
|
SU1062677A1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕНИЯ ЦВМ С КАНАЛОМ СВЯЗИ | 1991 |
|
RU2011217C1 |
| Система адаптивного управления параметром технологического процесса | 1988 |
|
SU1620989A1 |
| Устройство для оценки психофизиологических характеристик оператора автоматизированных систем управления | 1981 |
|
SU991480A1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И ЦИФРОВАЯ ТЕЛЕВИЗИОННАЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2440691C1 |
| Электрогидравлический следящий привод | 1987 |
|
SU1462234A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
Изобретение относится к области систем регулирования и управления и может быть использовано в системах программного управления станков и испытательных установок. Целью изобретения является повьшение точности компенсации периодических составляющих ошибки при циклическом изменении задания. Система автоматического управления содержит блок 1 циклического задания, первый сумматор 2, измеритель 3 рассогласования, блок 4 управления, объект 5, измерительное устройство 6, второй сумматор 7, первый регистр 8, запоминающее устройство 9, блок 10 деления, второй регистр 11, задающий генератор 12, элемент 13 задержки, входы Подготовка 14 и Пуск 15. Цель изобретения достигается за счет связи выхода измерителя 3 рассогласования с вторым входом второго сумматора и подключения входа и выхода блока 10 деления соответственно к выходу запоминающего устройства 9 и второму входу первого сумматора 2. 1 ил. I (Л 00 ел со со ел
| Клапанное устройство для скважинных штанговых насосов | 1987 |
|
SU1476109A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система управления | 1984 |
|
SU1234810A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
