Изобретение относится к электротехнике, а именно к частотно-управляемым электроприводам на базе син- кронных двигателей, и может быть использовано для регулирования скорост и момента на валу двигателя с высоко точностью.
Цель изобретения - улучшение пусковых характеристик путем автоматического введения в синхронизм синхронного двигателя.
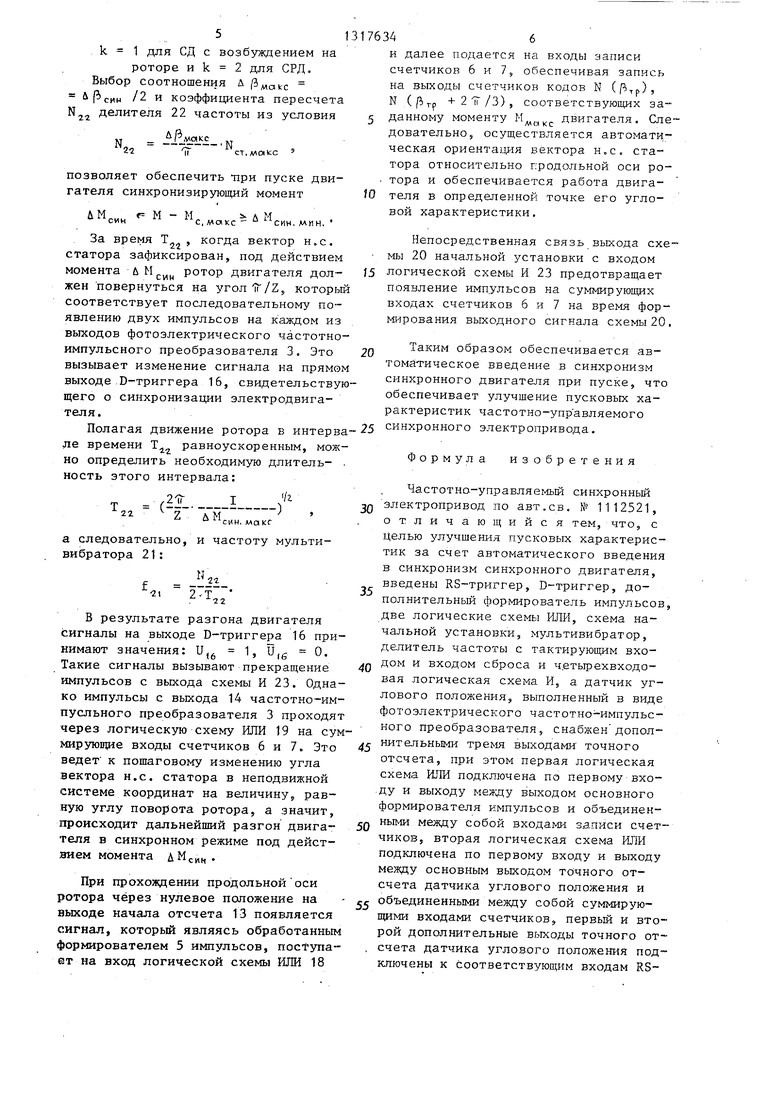
На фиг.1 представлена функдиональ ная схема.частотно-управляемого синхронного электропривода; на фиг.2 - зависимость момента от угла.
Частотно-управляемый синхронный электропривод содержит синхронный двигатель 1, к обмоткам статора ко- торого подключены выходы регулируемого источника 2 тока, датчик 3 углового положения, установленньй навалу синхронного двигателя 1, блок 4 задания амплитуды тока статора, формирователь 5 импульсов, два счетчика 6 и 7, каждый из которых снабжен входом для предварительной установки кода, входом записи и суммирующим входом, два постоянных запоминающих блока 8 и 9, запрограммированных по синусоидальному закону, два цифроана- логовых умножителя 10 и 11 и сумматор 12. При этом датчик 3 углового положения выполнен в виде фотоэлектрического частотно-импульсного преобразователя с выходом 13 грубого отсчета, подключенным к входу формирователя 5 импульсов, и выходом 14 точного отсчета. Выходы счетчиков 6 и 7 подключены к входам соответствующих постоянных запоминающих блоков 8 и 9, выходы которых соединены с цифровыми входами цифроаналоговьк умножителей 10 и 11 соответственно. Аналоговые входы цифроаналоговых умножителей 10 и 11 объединены между собой и подключены к выходу блока 4 задания а.мплитуды тока статора. Выходы цифроаналоговых умножителей 10 и 11 непосредственно и через сумма- тор 12 подключены к соответствующим управляющим входам регулируемого источника тока 2.
В частотно-управляемьй синхронный электропривод введены RS-триггер 15, D-триггер 16, дополнительный формирователь 17 импульсов, две логические схемы или 18 и 19,, схема 20 на чальной установки, мультивибратор 21
делитель 22 частоты с тактирующим входом и входом сброса и четырехвхо- довая логическая схема И 23. Датчик 3 углового положения снабжен дополнительными тремя выходами 24-26 точного отсчета. При этом первая логи ческая схема ИЛИ 18 подключена по первому входу и выходу между вькодом формирователя 5 импульсов и объединенными между собой входами записи счетчиков 6 и 7. Вторая логическая схема ИЛИ 19 подключена по первому входу и выходу меж,цу выходом 14 точного отсчета датчика 3 углового положения и объединенными между собой суммирующими входами счетчиков 6 и 7. Дополнительные выходы 24 и 25 точного, отсчета датчика 3 углового положения подключены к соответствующим
входам RS-триггера 15, выход которого соединен с D-входом D-триггера. Дополнительньй выход 26 точного отсчета датчика 3 углового положения подключен к входу синхронизации Dтриггера 16, прямой выход которого через дополнительный формирователь 17 импульсов соединен с вторым входом первой логической схемы ИЛИ 18.
Четыре входа логической схемы И 23 подключены соответственно к инверсному выходу D-триггера, выходу мультивибратора 21, выходу делителя 22 частоты и выходу схемы 20 начальной установки. Выход логической схемы
И 23 соединен с вторым входом второй логической схемы ИЛИ 19. Входы сброса D-триггера 16 и делителя 22 часто- ты подключены к выходу схемы 20 на- чальной установки, а вьпсод мультивибратора 21 - к тактирующему входу делителя 22 частоты.
В качестве датчика 3 угл ового положения использован фотоэлектрический частотно-импульсный преобразователь, имеющий два канала точного отсчета и канал грубого отсчета (начала отсчета). Сигнал начала отсчета с выхода 13,.повторяющийся через каждый оборот растрового лимба датчика, дает возможность определить нулевое положение датчика. Первый канал точного отсчета имеет прямой 14-и инверсный 24 выходы, а второй канал прямой 25 и инверсный 26 выходы.
I
Частотно-управляемый синхронный
электропривод работает следующим образом.
, 313
при подключении электропривода к питающей сети схема 20 начальной ус.тановки вызывает сигнал на выходе D-триггера 16 ,. . 0. Сигнал с выхода, формирователя 1,7 импульсов в момент установки в О триггера 16 через схему ИЛИ 18 записывает в счет.чики б и 7 значения N ( и N (/Ьтр + 2 ТГ /3), соответствующие требуемой ориентации намагничивающей силы (и.с.) статора двигателя 1 при его заданном максимальном моменте, если ротор двигателя находится в положении Начало отсчета. Однако в момент включения ротор двигателя 1 ориентирован произвольным образом, поэтому действующий на него момент имеет произвольные величину и знак. Под действием этого момента и статического момента нагрузки ротор двигателя может развивать скорость в каком-либо направлении или находится в исходном положении. Направление вращения ротора анализируется при помощи триггеров 15 и 16, -связанных с выходами фотоэлектрического частотно-импульсного преобразователя 3. Сигналы на выходах последнего описываются выражениями:
и (Zwt);
и, sign (Z cot );
U26 5; . .
U,.
где Z - число импульсов на одном из выходов преобразователя 3 за оборот вала;
О - угловая скорость вала двигателя .
При вращении двигателя на прямом выходе D-триггера 16 в момент появления фронта сигнала с выхода 26 формируется сигнал U,g , зависящий от
знака угловой скорости ротора:
и
(6
1, при со о О, при СО О.
Таким образом, при пуске двигателя 1 значение сигнала на прямом выходе триггера 16 одинакового как в случае неподвижного ротора двигателя 1, так и в случае его вращения в обратном направлении U
0.
,-fc 0)
в то же время сигнал на инверсном выходе D-триггера 16 U. 0,-fc 0)
17634-4
разрешает прохождение импульсов с .мультивибратора 21 на выход логической схемы И 23. Следовательно, через логичес.кие схемы И 23 и ИЛИ 19 имс пульсы с выхода мультивибратора 21 проходят на суммирующие входы счетчиков 6 и 7, что вызывает быстрое изменение их выходного кода со значений Ng , /которые опреtO деляли угол ртр вектора н.с. статора, на величину uN f, Т (где fj, - частота мультивибратора 21; 1 - половина периода сигнала на выходе дeлvIтeля частоты 22)..
f5 Величина uN и определяет , перемещение результирующего вектора
- 2 н.с. статора на угол Лр п
ст макс к iN,(где N - объем счетчика
оС т М СД И С ,
20 6 по отношению к продольной оси ротора, что соответствует изменению момента двигателя согласно его угловой характеристике.
На протяжении следующего полупе25 риода Т22 сигнала с выхода делителя 22 частоты вектор н.с. неподвижен относительно статора, и на ротор двигателя 1 действует момент М М(R „ +
1 кач + i ), соответствующий новому значе30 ниш угла / / ка1 +
В процессе последовательного изменения угла (3 результирующий вектор н.с. статора занимает положение относительно продольной оси ротора в
35 зоне /3 jf ,c(j. , обозначенной на фиг.2 , . . При этом двигатель 1 развивает момент, больший максимального статического момента нагрузки, а значит, динами40 ческий момент синхронизации лМ,. М - М макс двигателя имеет заданный знак и обеспечивает разгон двигателя. -При малых углах поворота, соответствующих нескольким импульсам
45 с выхода датчика 3 углового положе-. ния, следует считать динамический момент двигателя постоянным, а его движение - равноускоренным.
Величина динамического (синхроки50 зирующего) момента в процессе поша- .гового изменения угла на величину является минимальной для случая / ± /2:
55 ЛМ, M,,.sin(W2 - - P-ku(,c/2) - ,
где р - число пар полюсов двигателя 1;
513
. k 1 для СД с возбуждением на
роторе и k 2 для СРД. Выбор соотношения л /2 и коэффициента пересчета 22 делителя 22 частоты из условия
(КС
f
N
ст. МО КС
позволяет обеспечить при пуске двигателя синхронизирующий момент
ЛМ,,„ М - Мс.ллакс син.ммн.
За время Т, , когда вектор н.с. статора зафиксирован, под действием момента и М.,., ротор двигателя долСиН
жен повернуться на угол IT/Z, который соответствует последовательному появлению двух импульсов на каждом из выходов фотозлектрического частотно- импульсного преобразователя 3, Это вызывает изменение сигнала на прямом выходе D-триггера 16, свидетельствующего о синхронизации электродвигателя.
Полагая движение ротора в интервале времени Т равноускоренным, можно определить необходимую длитель- . ность зтого интервала:
О (--i Z
ЛМсин,
Чг -)
ИН. МО КС
а следовательно, и частоту мультивибратора 21:
71
N,, 2-т
22
В результате разгона двигателя сигналы на выходе D-триггера 16 принимают значения: U, 1, U,g 0. Такие сигналы вызывают прекращение импульсов с выхода схемы И 23. Однако импульсы с выхода 14 частотно-им- пусльного преобразователя 3 проходят через логическую схему ИЛИ 19 на суммирующие входы счетчиков 6 и 7. Это ведет к пошаговому изменению угла вектора н.с. статора в неподвижной системе координат на величину, равную углу поворота ротора, а значит, происходит дальнейший разгон двигателя в синхронном режиме под действием момента ДМсц, .
При прохозвдении продольной оси ротора через нулевое положение на выходе начала отсчета 13 появляется сигнал, который являясь обработанным формирователем 5 импульсов, поступает на вход логической схемы ИЛИ 18
76346
и далее подается на входы записи счетчиков 6 и 7, обеспечивая запись на выходы счетчиков кодов N (ртр) N ( +21Г/3), соответствующих за- 5 данному моменту М, двигателя. Следовательно, осуществляется автоматическая ориентация вектора н.с. статора относительно продольной оси ро- тора и обеспечивается работа двига- Ш теля в определенной точке его угловой характеристики.
Непосредственная связь выхода схе- - мы 20 начальной установки с входом /5 логической схемы И 23 предотвращает появление импульсов на суммирующих входах счетчиков 6 и 7 на время формирования выходного сигнала схемы 20 .
/1 Таким образом обеспечивается автоматическое введение в синхронизм синхронного двигателя при пуске, что обеспечивает улучшение пусковых характеристик часто тно-упр авляемого 25 синхронного электропривода.
Формула изобретения
Частотно-управляег.1Ый синхронньш
электропривод по авт.св. № 1112521, отличаю щийсятем,что, с Целью улучшения пусковых характеристик за счет автоматического введения в синхронизм синхронного двигателя, введены RS-триггер, D-триггер, дополнительный формирователь импульсов, две логические схемы ИЛИ, схема начальной установки, мультивибратор, делитель частоты с тактирующим дом и входом сброса и ч.етырехвходо- вая логическая схема И, а датчик углового положения, выполненный в виде фотоэлектрического частотно-импульсного преобразователя, снабжен допол г нитепьными тремя выходами точного отсчета, при этом первая логическая схема ИЛИ подключена по первому входу и выходу между выходом основного формирователя импульсов и объединен Q ньв-ш между собой входами записи счетчиков, вторая логическая схема ИЛИ подключена по первому входу и выходу меладу основным выходом точного отсчета датчика углового положения и
ее объединенными между собой суммирующими входами счетчиков, первый и второй дополнительные выходы точного от- , счета датчика углового положения подключены к соответствующим входам RS35
713
триггера, выход которого соединен с D-входом D-триггера, третий дополнительный выход точного отсчета датчика углового положения подключен к входу синхронизации D-триггера, прямой выход которого через дополнитель- ньй формирователь импульсов соединен с вторым входом первой логической схемБ ШТИ, четыре входа логической схемы И подключены соответственно к
34.8
инверсному выходу,D-триггера, выходу мультивибратора, выходу делителя частоты и выходу схемы начальной установки,, а выход логической схемы И
соединен с вторым входом второй логической схемы ИЛИ, входы сброса D-триггера и делителя частоты подключены к выходу схемы начальной установки, а выход мультивибратора - к
тактирующему входу делителя частоты.
м,
махе
с Макс
..Мсин.нин.
ZJf/
фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый синхронный электропривод | 1983 |
|
SU1112521A1 |
| Устройство для пуска синхронной @ -фазной машины | 1990 |
|
SU1823119A1 |
| Устройство для управления двигателем и коррекции дрейфа гироскопа | 2021 |
|
RU2789116C1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2485665C1 |
| Управляемый электропривод | 1983 |
|
SU1144201A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1330725A1 |
| Стабилизированный вентильный электропривод с комбинированным управлением | 1987 |
|
SU1610588A1 |
| Стабилизированный бесконтактный двигатель с комбинированным управлением | 1987 |
|
SU1522355A1 |
| Электропривод с частотно-токовым управлением | 1991 |
|
SU1836804A3 |
| Вентильный электропривод | 1985 |
|
SU1356171A1 |
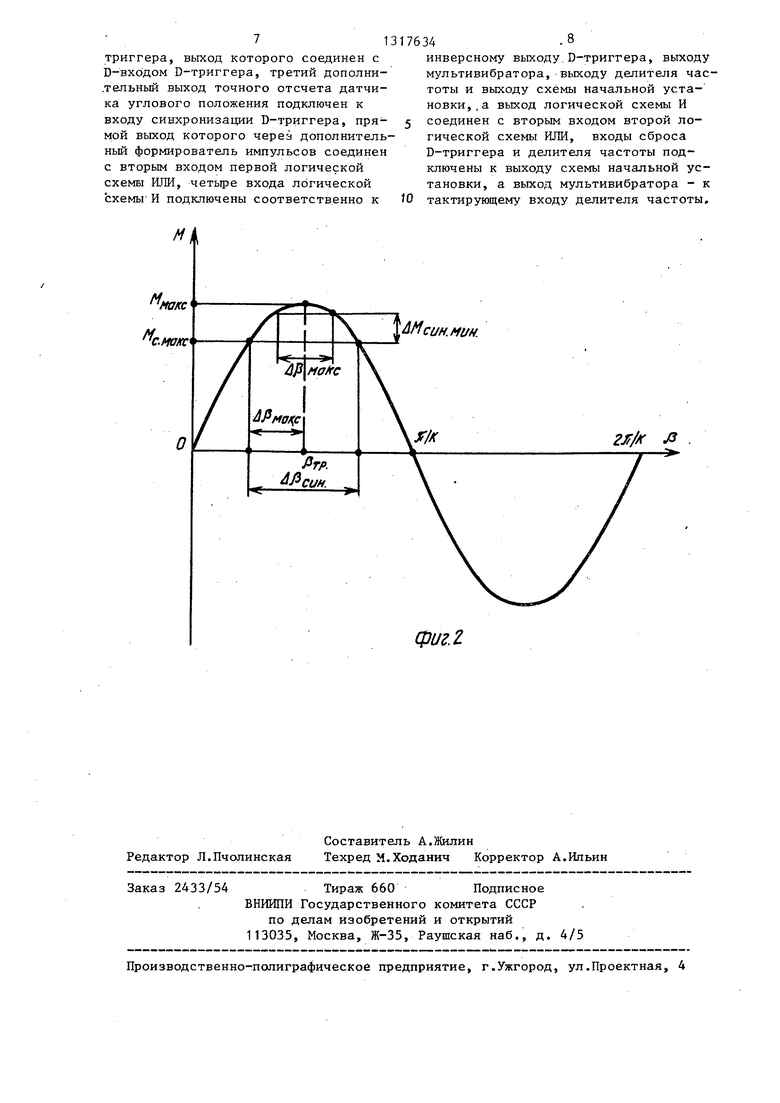
Изобретение относится к электротехнике. Целью изобретения является улучшение пусковых характеристик. Указанная цель достигается введением в частотно-управляемый синхронный электропривод RS-триггера 15, D-триггера 16, формирователя 17 импульсов двух логических схем ИЛИ 18, 19, схемы 20 начальной установки, мультивибратора 21, делителя 22 частоты и логической схемы И 23. Введение указанных блоков обеспечивает автоматическое введение в синхронизм синхронного двигателя 1 при пуске. 2 ил. (Л сриг.1 N)
Редактор Л.Пчолинская
Составитель А.Жилин
Техред М.Ходанич Корректор А.Ильин
Заказ 2433/54Тираж 660 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Частотно-управляемый синхронный электропривод | 1983 |
|
SU1112521A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
